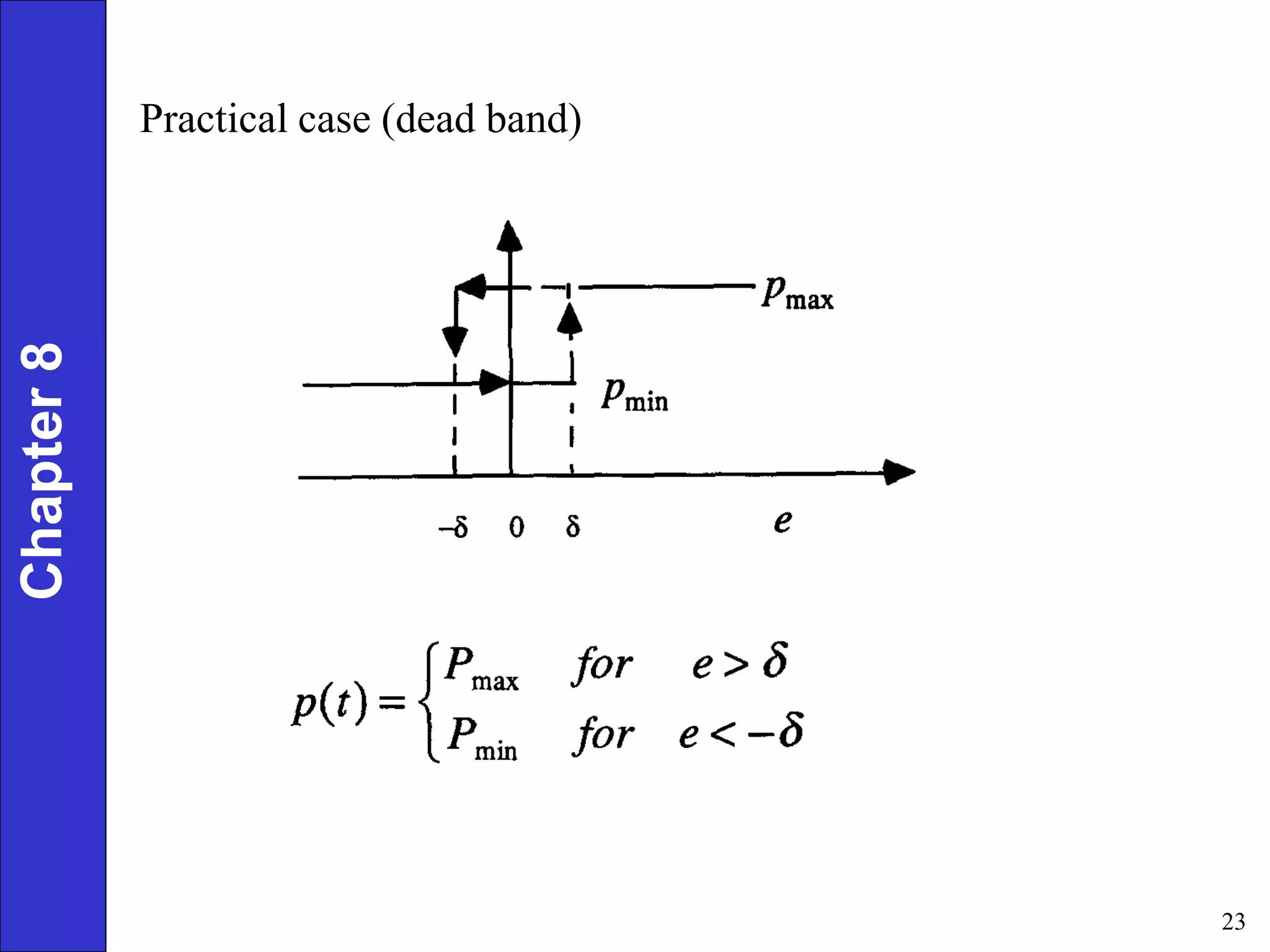
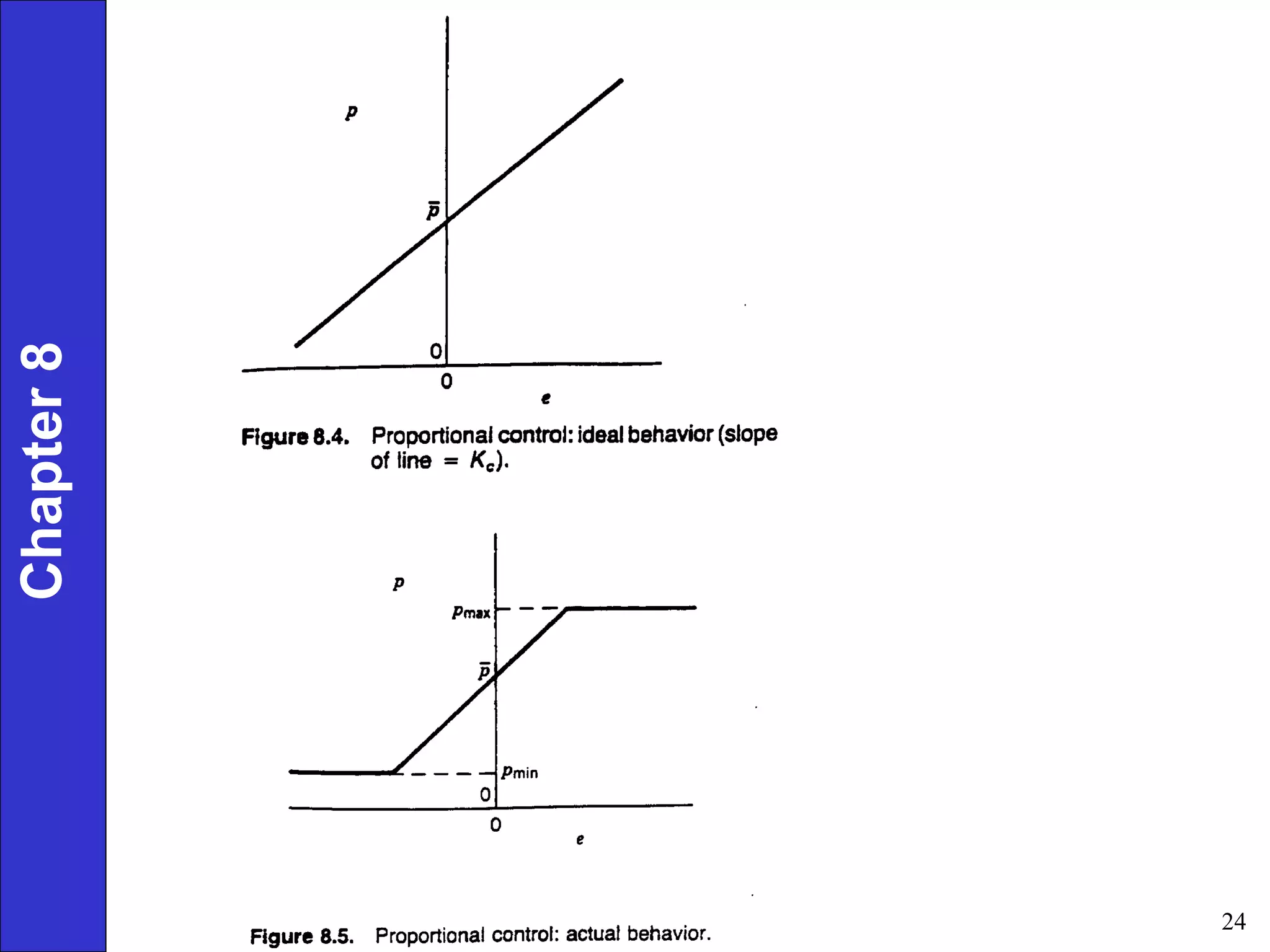
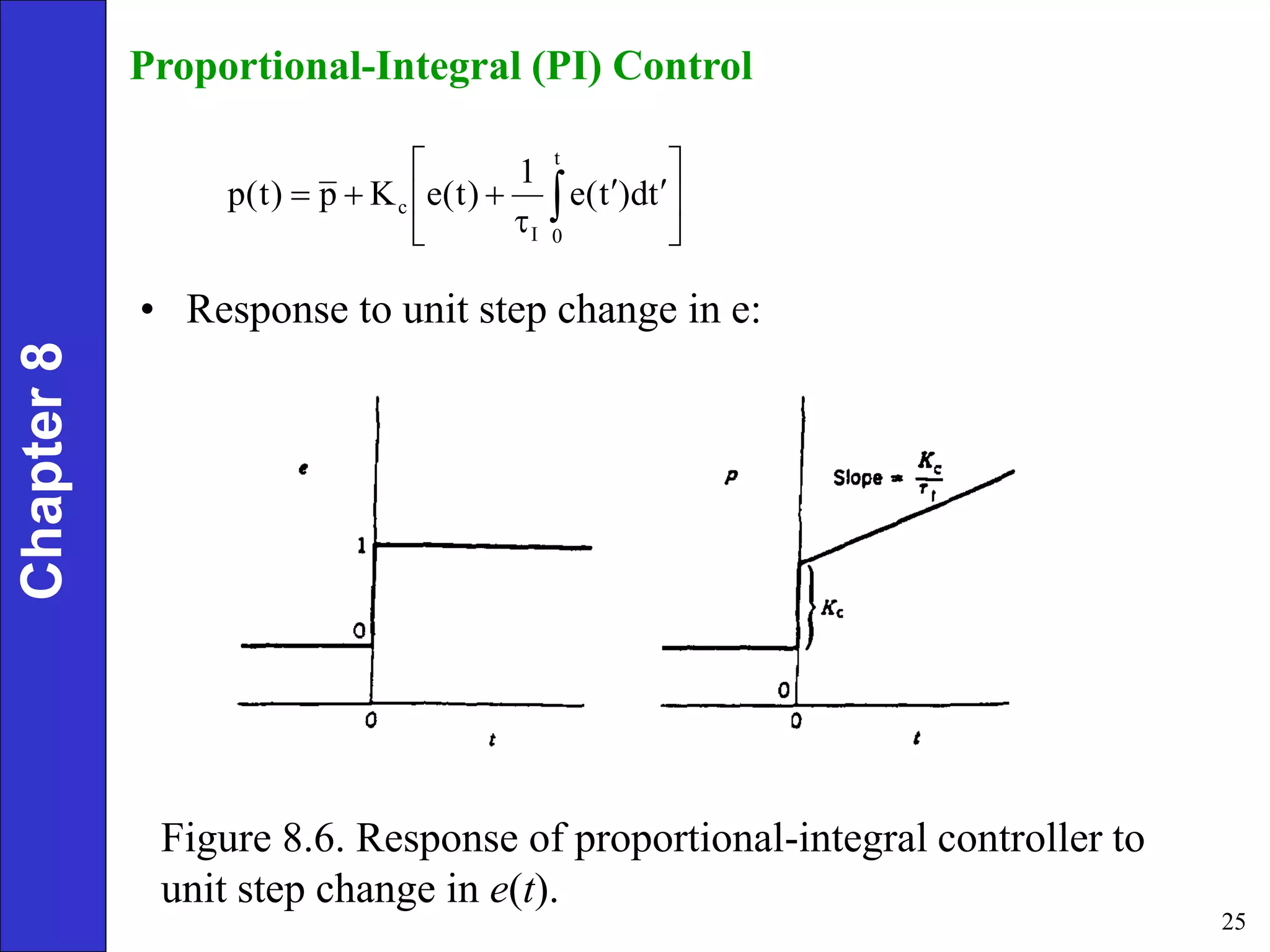
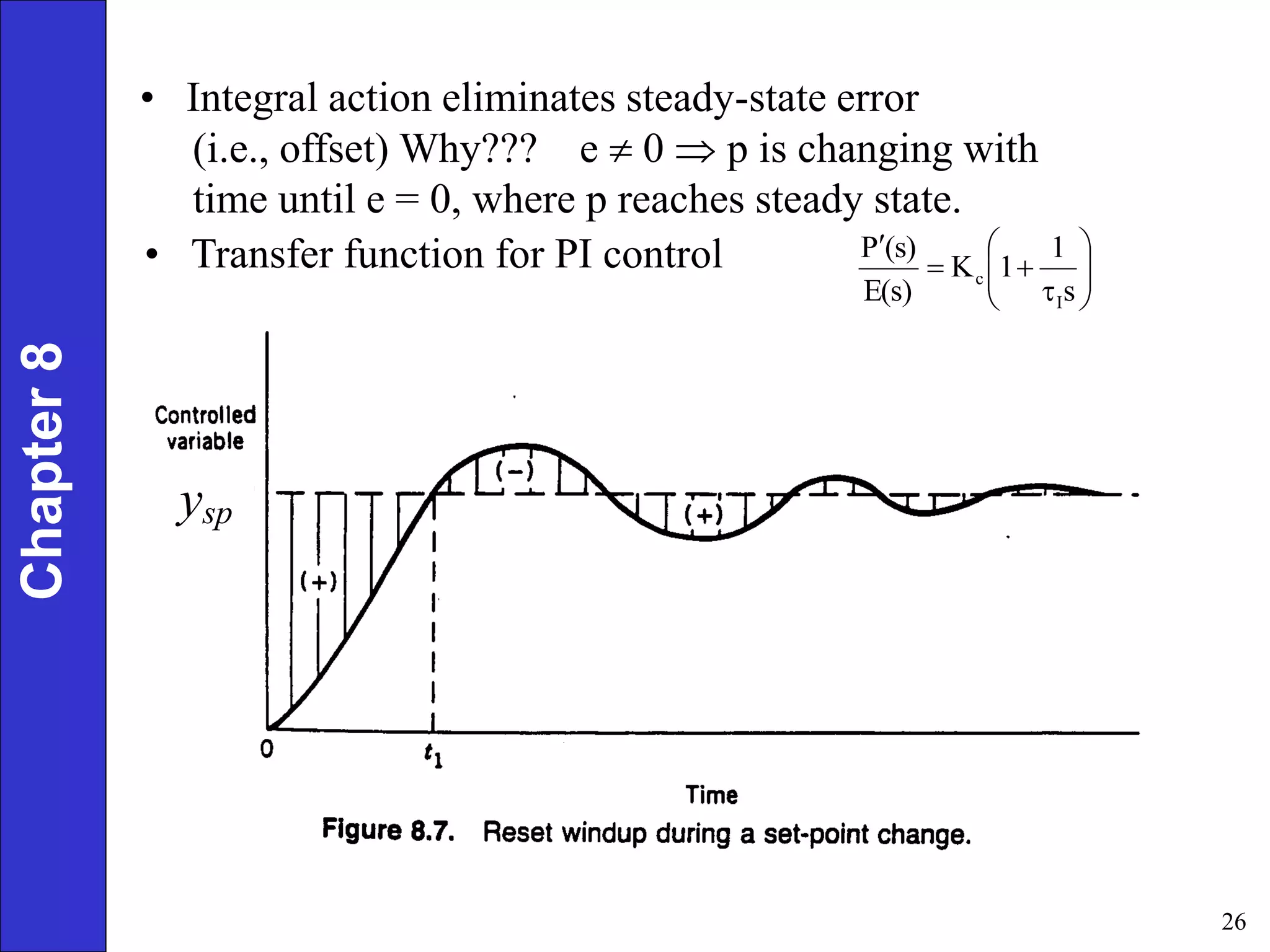
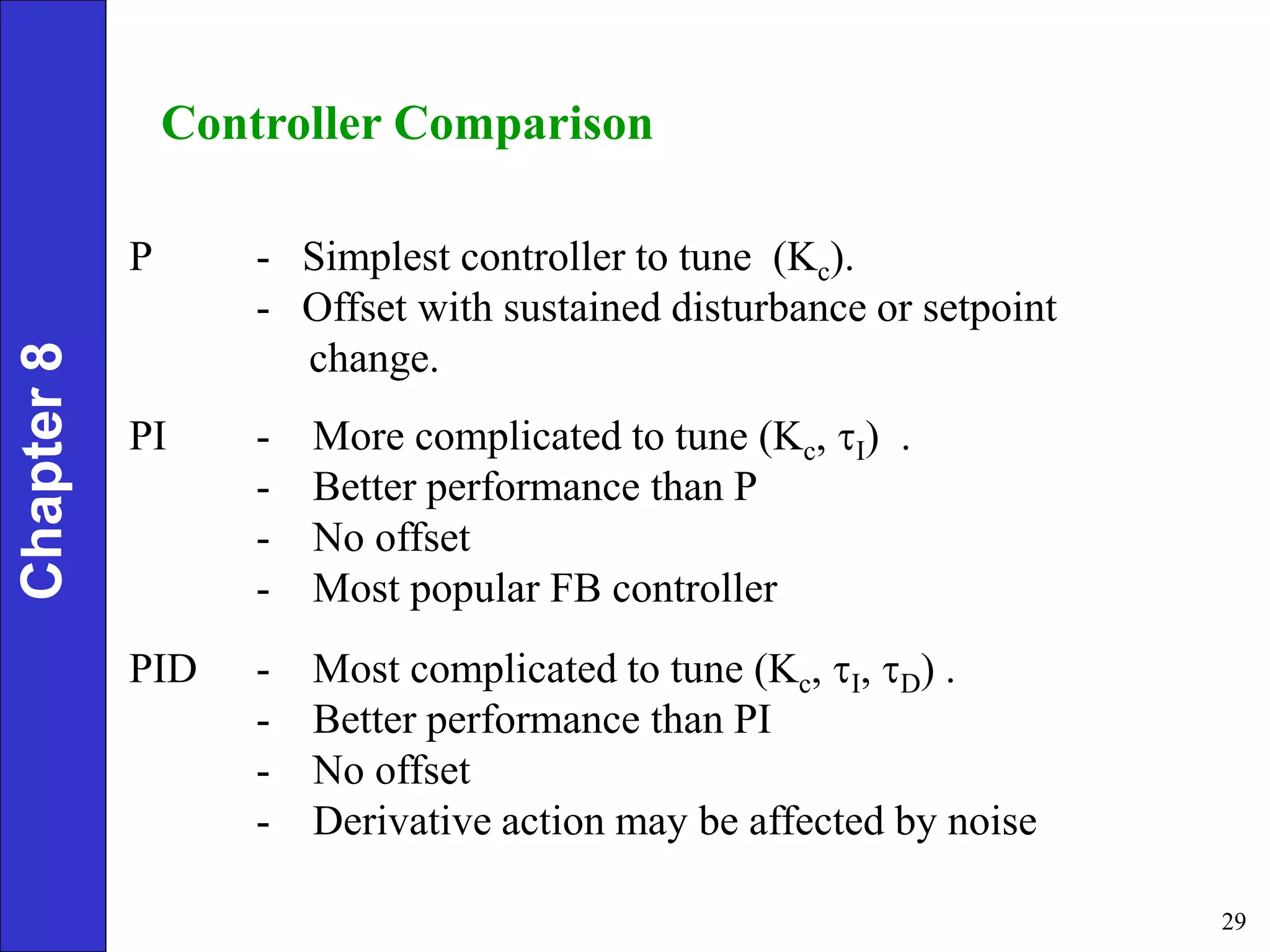
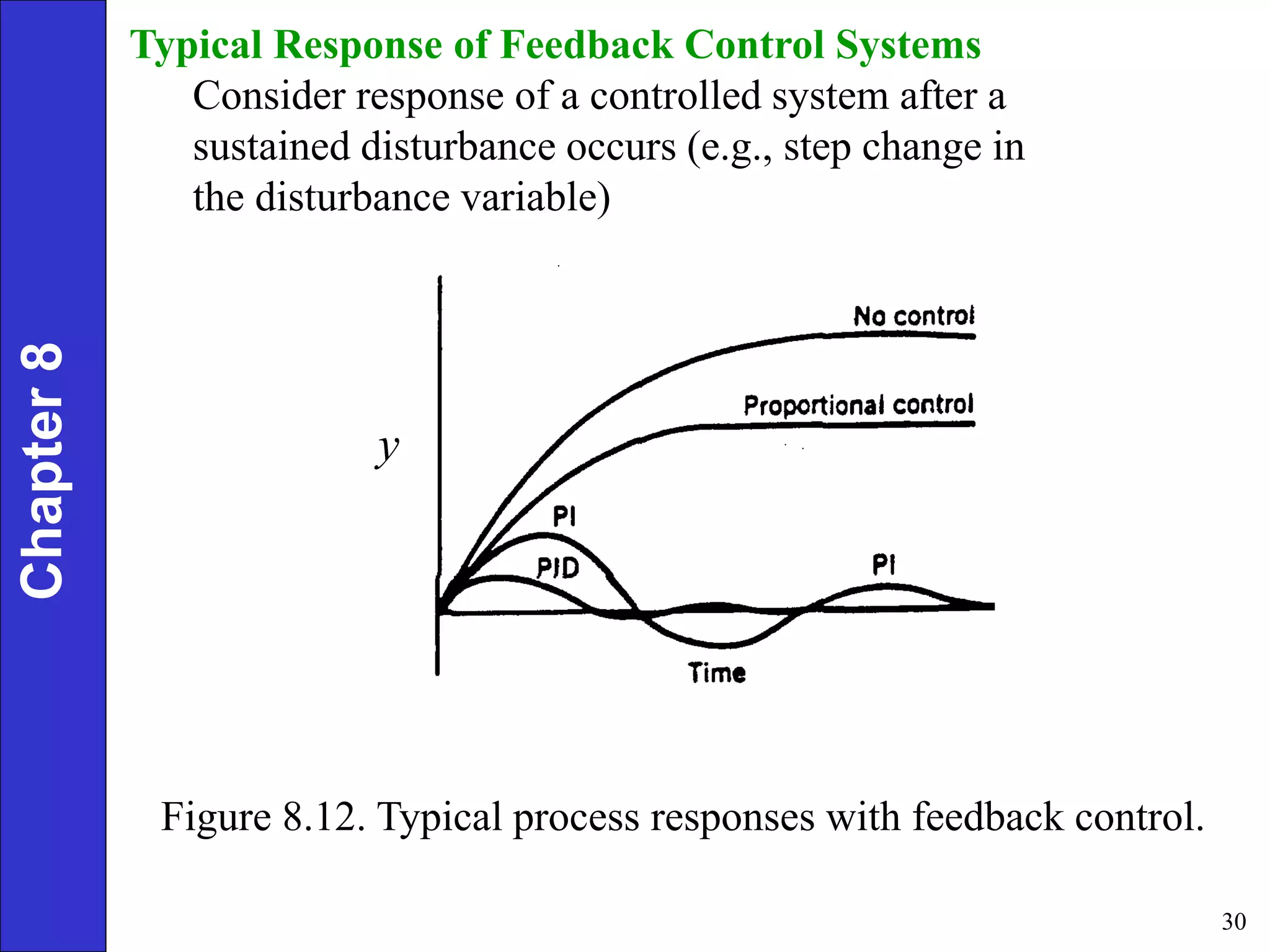
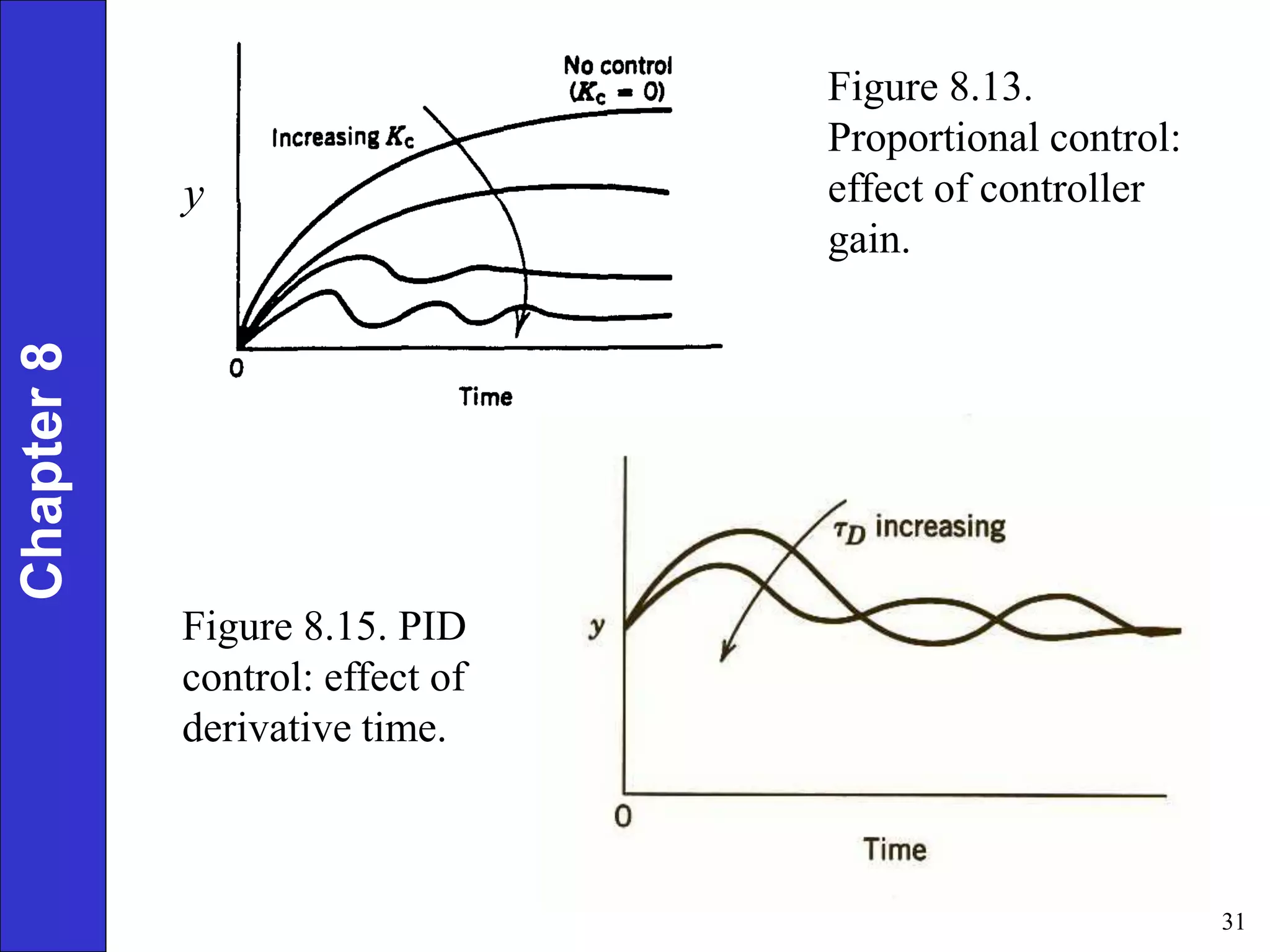
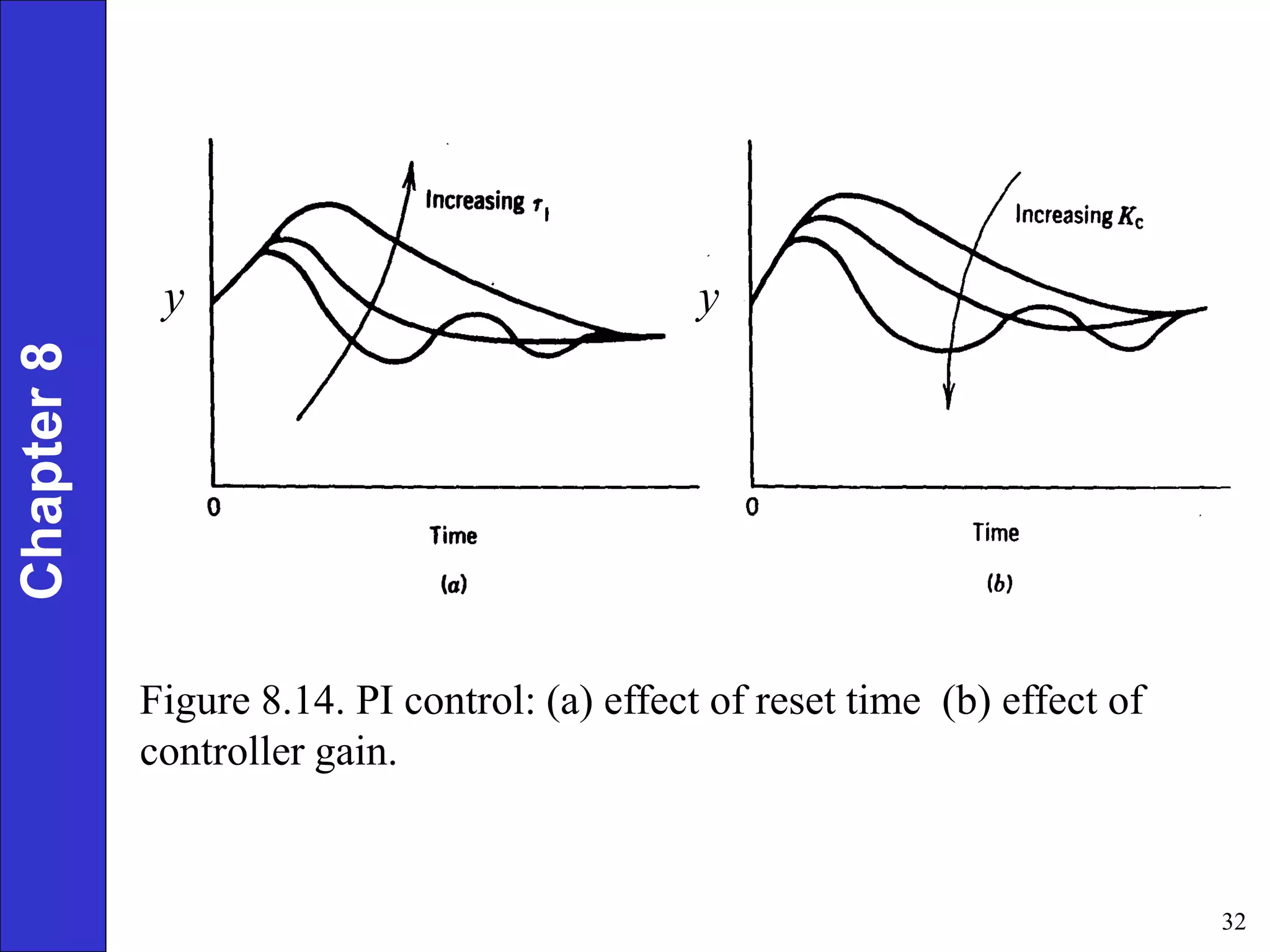
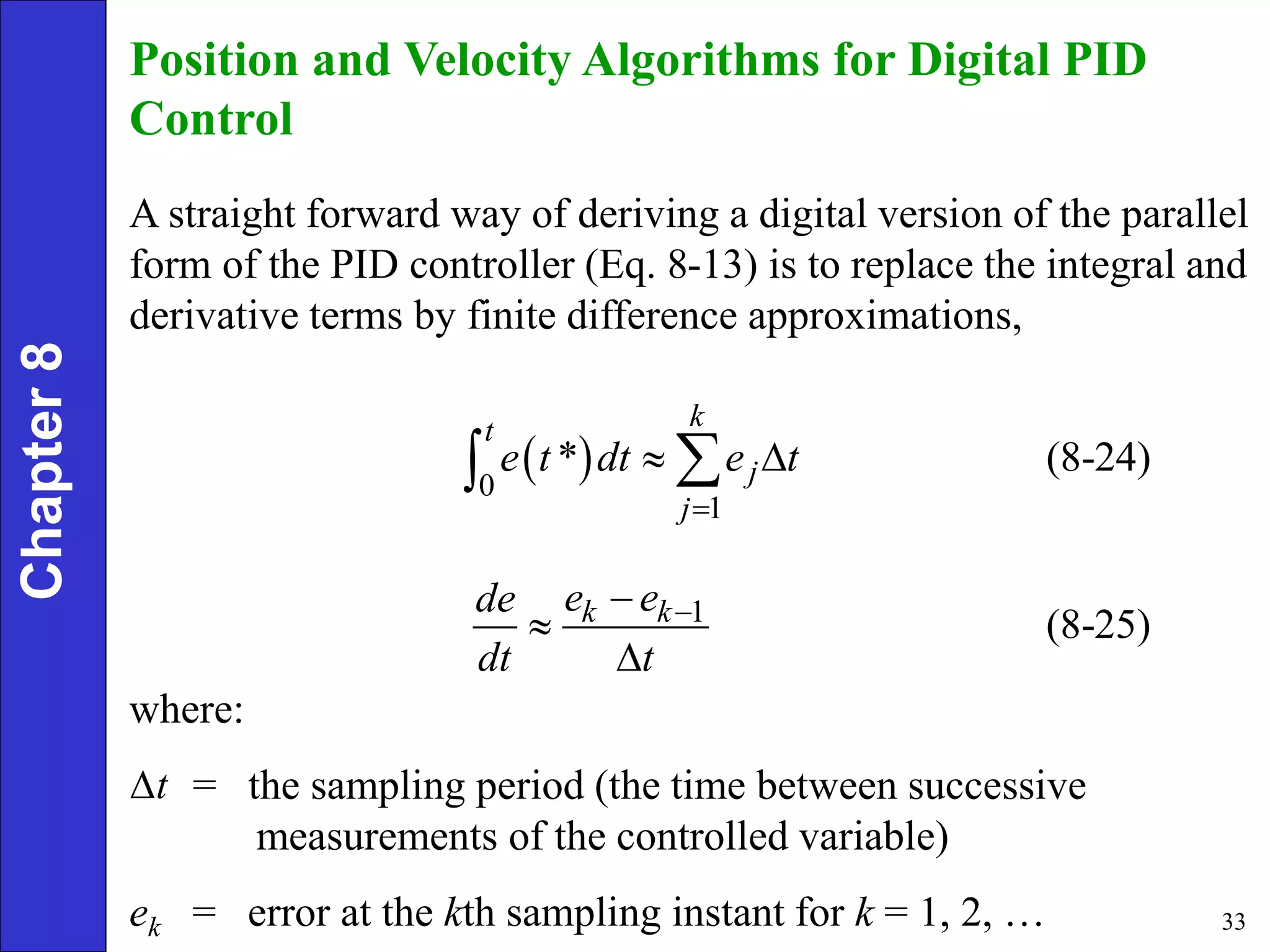
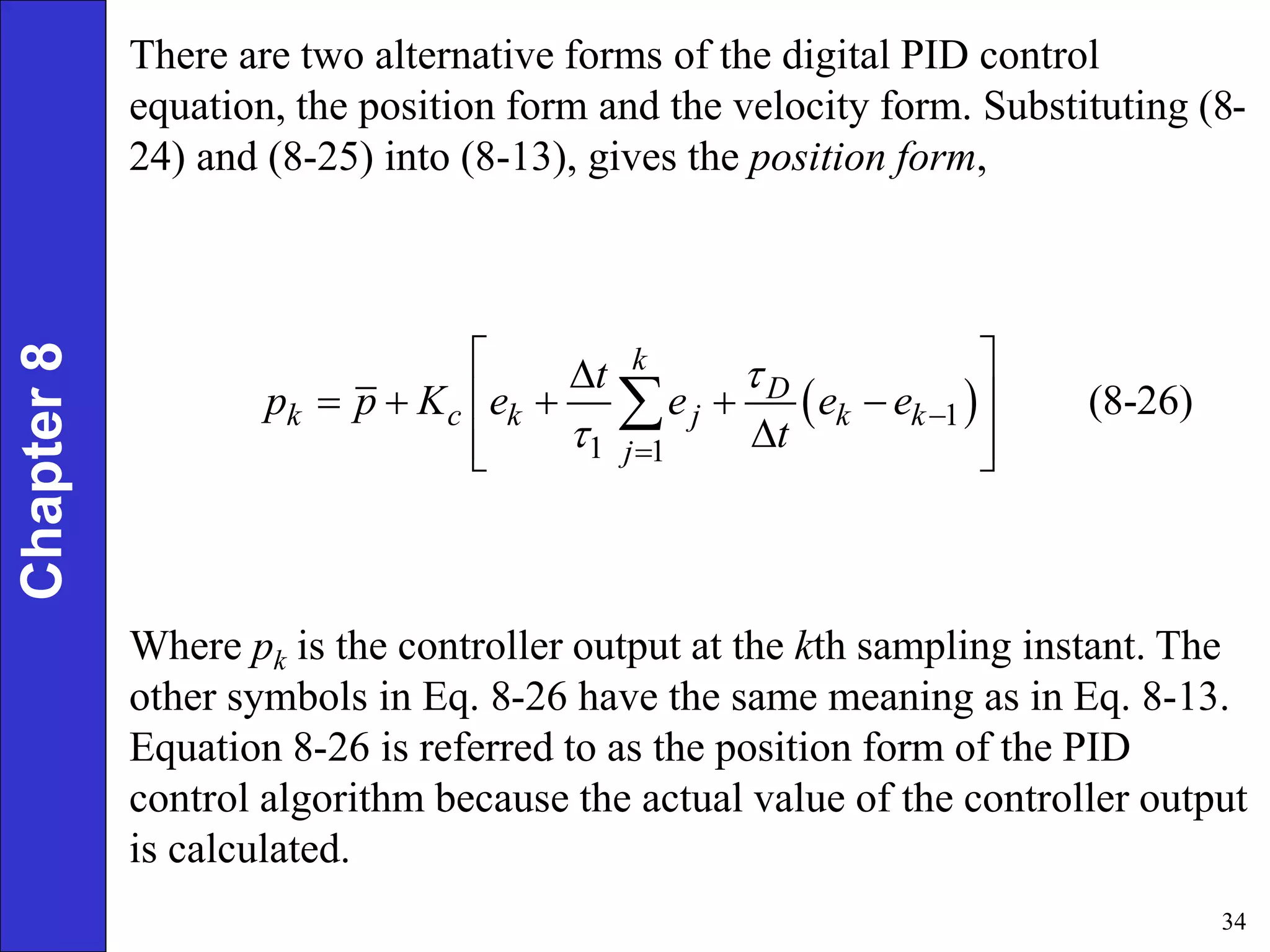
This document provides an overview of common feedback control modes including proportional (P), integral (I), derivative (D), and PID control. It defines the basic control equations for each mode and discusses their transfer functions. P control reduces error proportionally but can result in steady-state offset. I control eliminates offset by integrating the error over time. D control anticipates changes in error to improve response. PID combines all three for the best performance but is most complex to tune. The document also covers practical considerations like controller forms, manual vs automatic modes, and derivative filtering.