
Recommended
More Related Content
What's hot
What's hot (17)
Similar to CHI'16 Journal "A Mouse With Two Optical Sensors That Eliminates Coordinate Disturbance During Skilled Strokes"
Similar to CHI'16 Journal "A Mouse With Two Optical Sensors That Eliminates Coordinate Disturbance During Skilled Strokes" (20)
Recently uploaded
Recently uploaded (20)
CHI'16 Journal "A Mouse With Two Optical Sensors That Eliminates Coordinate Disturbance During Skilled Strokes"
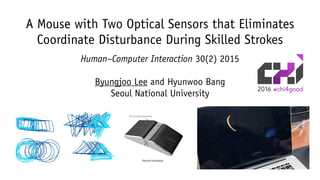
- 1. A Mouse with Two Optical Sensors that Eliminates Coordinate Disturbance During Skilled Strokes Human–Computer Interaction 30(2) 2015 Byungjoo Lee and Hyunwoo Bang Seoul National UniversityFirst prototype Second prototype Wooden frame 3D printed assembly
- 2. Contents 1. Decade-old Problem of Computer Mouse 2. Modelling and the Solution 3. Implementation of StereoMouse 4. User Study 5. Conclusion
- 3. 1. Decade-Ol Problem of Computer Mouse
- 4. Problem of Computer Mouse • Bad for steering and drawing tasks
- 5. • 15% longer time, 50% larger error at the same time. Zabramski et al., 2011 Error plotTime plotShape tracing task Problem of Computer Mouse
- 6. • Out of Path Movement (OPM) for mouse was 97% higher than for stylus. Sergey et al., 2005 Problem of Computer Mouse
- 7. • Aweful subjective ratings… Greenberg et al., 1992 Problem of Computer Mouse
- 8. However Not Bad for Pointing • Mouse shows very efficient pointing or dragging performance. 0bit/s 1,25bit/s 2,5bit/s 3,75bit/s 5bit/s Pointing Dragging Mouse Stylus w/ tablet Makenzie et al., 1991 Cockburn et al., 2012
- 9. Mouse vs. Stylus Mouse Stylus w/ tablet Price Low High Portability Good Bad Pointing performance Good Good Steering/drawing performance Bad Good Maintenance Easy Hard Workspace Broad Limited
- 10. Objective of This Research StereoMouse Stylus w/ tablet Price Low High Portability Good Bad Pointing performance Good Good Steering/drawing performance Adaptable Good Maintenance Easy Hard Workspace Broad Limited
- 11. 2. Modelling and Solving
- 12. Modelling Coordinate Disturbance (1) Body-fixed coordinate system of computer mouse X Y
- 13. (1) Body-fixed coordinate system of computer mouse X Y Modelling Coordinate Disturbance
- 14. X Y X Y Mouse Movement ≠ Pointer Movement
- 15. • The rotation of the wrist joint was naturally transformed into a straight line in the display space. Result Input Input Result Mouse Movement ≠ Pointer Movement
- 16. Unexpected Coordinate Disturbance Physical spaceIntention of user Display space Intention of User Physical Space Display Space
- 17. (1) How much the mouse will rotate? (2) How the optical sensor will transfer the user movement? Modelling Coordinate Disturbance
- 18. • A redundant 2D manipulator with 3 revolute joints. −1 −0.5 0 0.5 1 1.5 2 0 1 2 3 4 5 6 7 8 Angle (rad) Posturecost Shoulder Elbow Wrist e s w Modelling Mouse Rotation Elbow Shoulder Wrist
- 19. • Using parabolic cost functions for each of joint Modelling Mouse Rotation a 4. + + + 4. 1 2 3 4 5 + + + + + + 6 7 8 9 10 11 + + + + 4- 4- 4- A 13 14 15 16 17 is ~ 21 ~9 23 4- 4- 4- 4- 4- 4- 4- 28 29 30 31 32 33 34 b 4- + 36 37 + + 38 39 ~.. + 4O Fig. 1. a Top view of the experimental arrangement. The 41 target points are placed on a horizontal plane in front of the subject. The three measured angles are marked, b A schematical drawing of . or/ 20 ,'*0 60 80 100 120 140 160 elbow angle {deg) Cl 9 ~, , , -60 --'-0 -20 0 20 40 60 80 shoulder angte [de<J} 5 ml a~'~,a-_ _ j l 0 i , i i i i ~r-r-i i i i i ~ 1 i 20 40 60 80 100 120 140 160 elbow angle (deg) b 1~15 u 9 , , , , i i , i i ~ - i i i i , ! -60 -40 -20 O 20 40 60 80 shoulder angle (deg) -~-~'~s~ - "~ ~ ' I-~. _g = 20 ~0 60 SO C :1-60 -40 -20 s -60 -:0 -2Q 0 20 /-0 60 80 wrist angle [de9) _,- .j;,"5 9 i | w i i i~l i i i i i w i 29 L,O 60 80 100 120 140 160 elbow angle [deg) d :1 i - r | ~ i i i i i i i -60 -40 -20 0 20 LO 60 80 shoulder angle (deg) el t '" "o . . . . . . . ~,'~,'~--~,'X,',", , , -so-~.o-20 o 20 ~,o 6o e 9 wrist anglo (deg} 9--" _,,- 0 I I I 1 i- i--i i I I l I I I l 20 /,0 60 80 109 120 14.0 160 elbow angle (deg) e i i i | i i i i F i i i -60 -40 -20 0 20 40 60 80 shoulder angle (deg) Fig. 3a-e. Psych 9 "comfort" functions fo from five subjects a to angle in degrees. Ordin subjective discomfort i the elbow those parabo which give the best app values. For shoulder a + S.D. range of those p is shown which are obt approximating the targ H. Cruise et al., 1990 Elbow Shoulder Wrist −1 −0.5 0 0.5 1 1.5 2 0 1 2 3 4 5 6 7 8 Angle (rad) Posturecost Shoulder Elbow Wrist e s w
- 20. • Solving inverse kinematics with minimizing the cost function: Desk coordinate system Region of interest Neutral posture Shoulder Elbow Wrist s =1.0 e =1.0 w = 0.25 ( 0.5, 0) (0.5, 0) (0, 0) (0, 0.5) (0, -0.5) x y e0 = 80° s0 = 0° w0 = 0° Horizontal deviation Verticaldeviation Amount of mouse rotation (deg) −0.5 0 0.5 −0.5 0 0.5 −40 −20 0 20 40 (+) (-) Amount of end effector rotation (deg) {costw(ɵw)+ coste(ɵe)+ costs(ɵs)} Horizontal deviation Verticaldeviation Modelling Mouse Rotation
- 21. O s Physical motion Disturbed motion Displacement of cursor net net effective r r(1 cos net ) rsin net r Disturbance in orientation Disturbance in length Modelling Transfer Function of Mouse •Transfer function within a time step
- 22. Verticaldeviation Cursor movement Hand movement Horizontal deviation −1.5 −1 −0.5 0 −0.5 0 0.5 1 Horizontal deviation Verticaldeviation Cursor movement Hand movement −0.8 −0.6 −0.4 −0.2 0 −0.4 −0.2 0 0.2 0.4 Verticaldeviation Cursor movement Hand movement Horizontal deviation −1.5 −1 −0.5 0 −0.5 0 0.5 1 Horizontal deviation Verticaldeviation Cursor movement Hand movement −0.8 −0.6 −0.4 −0.2 0 −0.4 −0.2 0 0.2 0.4 Cursor Movement Hand Movement Simulated Result of Coordinate Disturbance
- 23. Verticaldeviation Cursor movement Hand movement Horizontal deviation −1.5 −1 −0.5 0 −0.5 0 0.5 1 Horizontal deviation Verticaldeviation Cursor movement Hand movement −0.8 −0.6 −0.4 −0.2 0 −0.4 −0.2 0 0.2 0.4 Verticaldeviation Cursor movement Hand movement Horizontal deviation −1.5 −1 −0.5 0 −0.5 0 0.5 1 Horizontal deviation Verticaldeviation Cursor movement Hand movement −0.8 −0.6 −0.4 −0.2 0 −0.4 −0.2 0 0.2 0.4 Cursor Movement Hand Movement Simulated Result of Coordinate Disturbance StereoMouse compensates the distortion
- 24. Basic Idea of StereoMouse • Coordinate orientation is maintained throughout the movement by compensating for the angular deviation. θ =∫dθ t=0 t=i i t=i Linear velocity measured at i-th step i Before correction After correction
- 26. Hardware of StereoMouse • StereoMouse has two optical sensors to measure its body rotation. 2 x Arc Touch mouse | 2 x Wedge mouse Sensor resolution: 1000 counts per inch Sensor refresh rate: 125 Hz Angular resolution: = 0.0191 ~ 0.0286 degrees/count First prototype Second prototype Wooden frame 3D printed assembly First Prototype Second Prototype Sensor#1 Sensor#2 d Sensor #2 Sensor #1
- 27. Software of StereoMouse The data flow Laptop computer Sensor #1 Sensor #2 StereoMouse Multipoint mouse SDK Java application Bluetooth + (dx1,dy1,button_ state) (dx2,dy2,button_ state) (d , ) (dx,dy) (x, y)
- 28. Accuracy of Angular Measurement Stepping motor Motor controller Microprocessor Rotary table Timing belt Rotary table for the measurement
- 29. 1 2 3 4 5 6 7 8 9 10 −20 −15 −10 −5 0 5 10 15 20 Time (sec) (rad) 0.6 0.61 0.62 0.63 0.64 −1 −0.98 −0.96 −0.94 −0.92 Time (sec) −2 −1.5 −1 −0.5 0 0.5 1 1.5 2 −1.5 −1 −0.5 0 0.5 1 1.5 Measured angular velocity (rad/s) Referenceangularvelocity Accuracy of Angular Measurement
- 30. Accuracy of Angular Measurement
- 31. Algorithm of StereoMouse Pointing Dragging = 0, i = 0 = 0, i = 0 Sensor#1 Sensor#2 d
- 32. Algorithm of StereoMouse Pointing Dragging = 0, i = 0 = 0, i = 0 Sensor#1 Sensor#2 dCompensating angular disturbance Compensating length disturbance
- 33. 4. User Study
- 34. Two User Studies 1.Drawing without visual feedback (open-loop) — to test the predictability of the model 2.Drawing with visual feedback (closed-loop) — to measure kinematic performance after visual correction
- 36. Experimental Design • Drawing four primitive shapes (Circle, Triangle, Rectangle, Star) x 10 times. The experimental setup
- 37. Experimental Design: Dependent Measure • The aperture between start and end points of a drawing. Aperture Start point End point
- 38. Result: Aperture • Device mode on the aperture between the start and end point (F(1,8)=16.44; p < .004). • StereoMouse showed half of the aperture for the normal mouse condition. StereoMouseNormal mouse Aperture(pixels) 4000 3000 2000 1000 0 StereoMouse Normal mouse
- 40. Elimination of Coordinate Disturbance
- 42. Experimental Design • Drawing four primitive shapes (Circle, Triangle, Rectangle, Star) in two sizes (Large, Small) x 8 times. The experimental setup
- 44. Result on Average Speed • Device * Size effect (p=0.023, F(1,9)=7.530) For large size p=0.023 (Bonferroni correction) Size SmallLarge Averagespeed(pixels/ms) 6 5 4 3 2 1 0 StereoMouse Normal mouse 10.6% faster
- 45. Result on No. of Submovements • For x-component, Device effect (p=0.040, F(1,9)=5.750) Device StereoMouseNormal mouse No.ofsubmovementsinxcomponent 15 10 5 0 9.16% lower
- 46. Subjective Ratings: ISO 9241-9
- 47. Subjective Ratings: Absolute Smoothness Effort Accuracy Comfort Overall General indices Wrist Fatigue indices 0 1.25 2.5 3.75 5 Effort Accuracy Comfort Overall Normal mouse StereoMouse Wrist Arm Shoulder Neck Fatigue indices 0 1.25 2.5 3.75 5 0 1.25 2.5 3.75 5
- 48. Take-away Notes
- 49. Take-away Notes 1. Mechanical problems in HCI are relatively under-investigated. 2. Mechanistic modelling is a powerful method to describe and solve the problems.