Downloaded 161 times
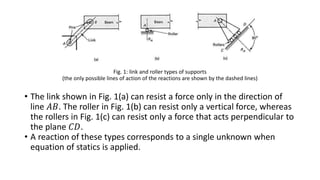
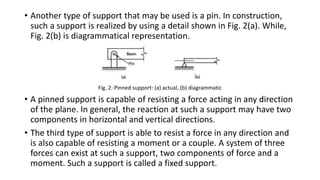
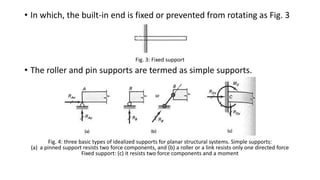
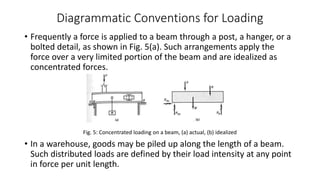
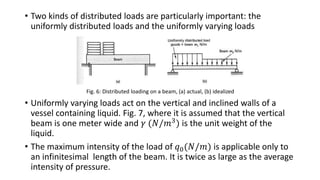


1. A beam can experience three internal forces at a section - axial force, shear, and bending moment. Even for planar beams, all three forces may develop. 2. There are three types of supports - roller/link, pin, and fixed. Roller/link supports resist one force, pin supports resist two forces, and fixed supports resist two forces and a moment. 3. Beams can experience different load types - concentrated, uniform distributed, and varying distributed loads. Methods are presented to calculate the shear, axial, and bending effects of these loads on beams.












































































