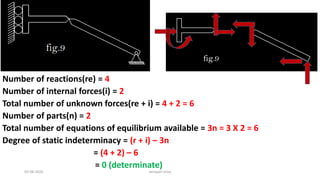
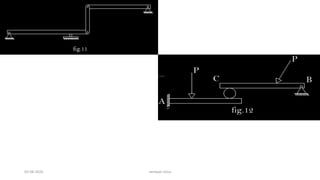
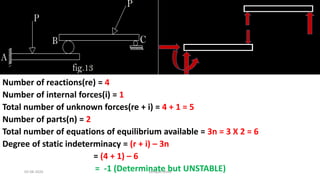
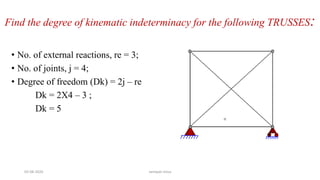
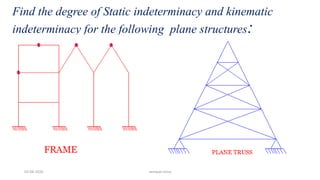
The document by V. Shiva provides an in-depth overview of structural analysis, focusing on the definitions of structures, types of connections, and the principles of equilibrium. It elaborates on determinate and indeterminate structures, detailing how to calculate their static and kinematic indeterminacies, and discusses the importance of compatibility equations. Additionally, it covers structural stability, different types of frames and trusses, and includes examples for determining degrees of static indeterminacy.