The document describes several algorithms:
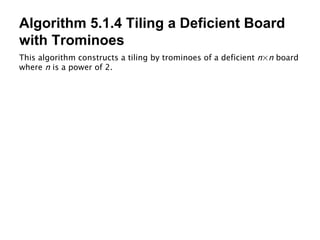
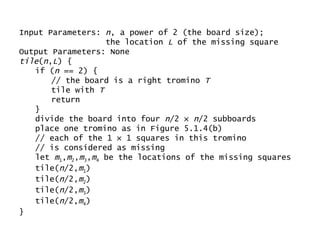
1) Algorithm 5.1.4 tiles a deficient n x n board with trominoes by recursively dividing the board into quarters and placing a tromino in the center.
2) Algorithm 5.2.2 merges two sorted subarrays into a single sorted array.
3) Algorithm 5.2.3 (Mergesort) sorts an array by recursively dividing it in half and merging the sorted halves.
4) Algorithm 5.3.2 finds the closest pair of points in an array of points by recursively dividing the points into halves sorted by x-coordinate and merging while maintaining the distance between closest points.

![Algorithm 5.2.2 Merge This algorithm receives as input indexes i , m , and j , and an array a , where a [ i ], ... , a [ m ] and a [ m +1], ... , a [ j ] are each sorted in nondecreasing order. These two nondecreasing subarrays are merged into a single nondecreasing array.](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-4-320.jpg)
![Input Parameters: a , i , m , j Output Parameter: a merge ( a , i , m , j ) { p = i // index in a [ i ], ... , a [ m ] q = m + 1 // index in a [ m + 1], ... , a [ j ] r = i // index in a local array c while ( p ≤ m && q ≤ j ) { // copy smaller value to c if ( a [ p ] ≤ a [ q ]) { c [ r ] = a [ p ] p = p + 1 } else { c [ r ] = a [ q ] q = q + 1 } r = r + 1 } ...](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-5-320.jpg)
![... // copy remainder, if any, of first subarray to c while ( p ≤ m ) { c [ r ] = a [ p ] p = p + 1 r = r + 1 } // copy remainder, if any, of second subarray to c while ( q ≤ j ) { c [ r ] = a [ q ] q = q + 1 r = r + 1 } // copy c back to a for r = i to j a [ r ] = c [ r ] }](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-6-320.jpg)
![Algorithm 5.2.3 Mergesort This algorithm sorts the array a [ i ], ... , a [ j ] in nondecreasing order. It uses the merge algorithm (Algorithm 5.2.2). Input Parameters: a , i , j Output Parameter: a mergesort ( a , i , j ) { // if only one element, just return if ( i == j ) return // divide a into two nearly equal parts m = ( i + j )/2 // sort each half mergesort ( a , i , m ) mergesort ( a , m + 1, j ) // merge the two sorted halves merge ( a , i , m , j ) }](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-7-320.jpg)
![Algorithm 5.3.2 Finding the Distance Between a Closest Pair of Points This algorithm finds the distance between a closest pair of points. The input is an array p [1], ... , p [ n ] of n = 2 points. If p is a point, p . x is the x - coordinate of p , and p . y is the y -coordinate of p . The function merge is Algorithm 5.2.2 and mergesort is Algorithm 5.2.3. The function merge uses as the key the y -coordinate of the point. The function mergesort uses as the key either the x - or y -coordinate of the point; the comments indicate which. The function dist ( p , q ) returns the Euclidean distance between points p and q .](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-8-320.jpg)
![Input Parameters: p Output Parameter: None closest_pair ( p ) { n = p . last mergesort ( p ,1, n ) // sort by x-coordinate return rec_cl_pair ( p ,1, n ) } // rec_cl_pair assumes that input is sorted by x -coordinate. // At termination, the input is sorted by y -coordinate. rec_cl_pair ( p , i , j ) { if ( j - i < 3) { mergesort ( p , i , j ) // sort by y -coordinate // find the distance delta between a closest pair delta = dist ( p [ i ], p [ i + 1]) if ( j - i == 1) // two points return delta // three points if ( dist ( p [ i + 1], p [ i + 2]) < delta ) delta = dist ( p [ i + 1], p [ i + 2]) if ( dist ( p [ i ], p [ i + 2]) < delta ) delta = dist ( p [ i ], p [ i + 2]) return delta } ...](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-9-320.jpg)
![... k = ( i + j )/ 2 l = p [ k ]. x deltaL = rec_cl_pair ( p , i , k ) deltaR = rec_cl_pair ( p , k + 1, j ) delta = min ( deltaL , deltaR ) // p [ i ], ... , p [ k ] is now sorted by y -coordinate, and // p [ k + 1], ... , p [ j ] is now sorted by y -coordinate. merge ( p , i , k , j ) // p [ i ], ... , p [ j ] is now sorted by y -coordinate. // store points in the vertical strip in v . t = 0 for k = i to j if ( p [ k ]. x > l - delta && p [ k ]. x < l + delta ) { t = t + 1 v [ t ] = p [ k ] } // look for closer pairs in the strip by comparing // each point in the strip to the next 7 points. for k = 1 to t - 1 for s = k + 1 to min ( t , k + 7) delta = min ( delta , dist ( v [ k ], v [ s ])) return delta }](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-10-320.jpg)
![Algorithm 5.4.1 Matrix Product This algorithm computes the product C of the n × n matrices A and B directly from the definition of the matrix product. Input Parameters: A , B Output Parameter: C matrix_product ( A , B , C ) { n = A . last for i = 1 to n for j = 1 to n { C [ i ][ j ] = 0 for k = 1 to n C [ i ][ j ] = C [ i ][ j ] + A [ i ][ k ] * B [ k ][ j ] } }](https://image.slidesharecdn.com/chap05alg-100309014431-phpapp02/85/Chap05alg-11-320.jpg)