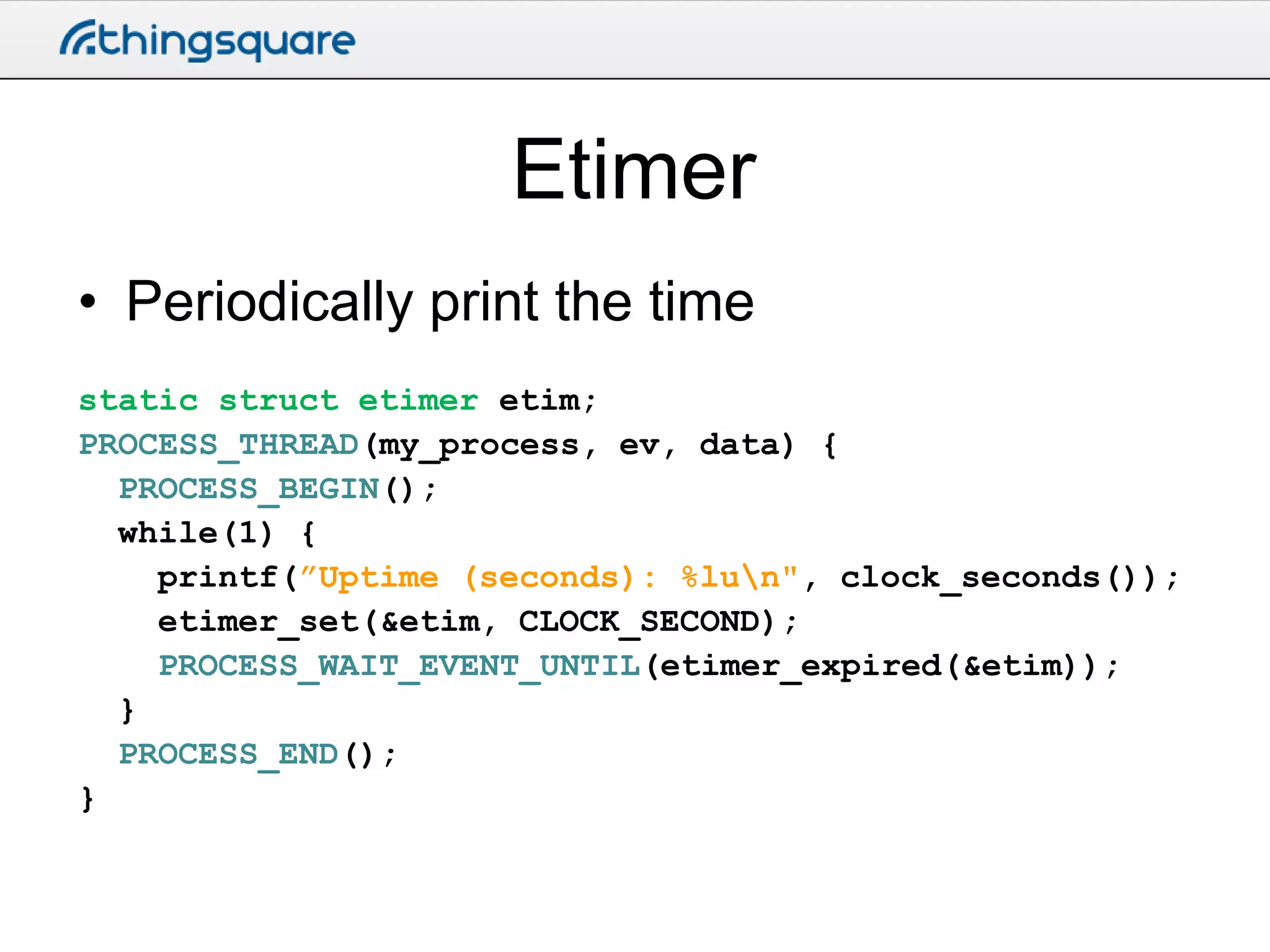
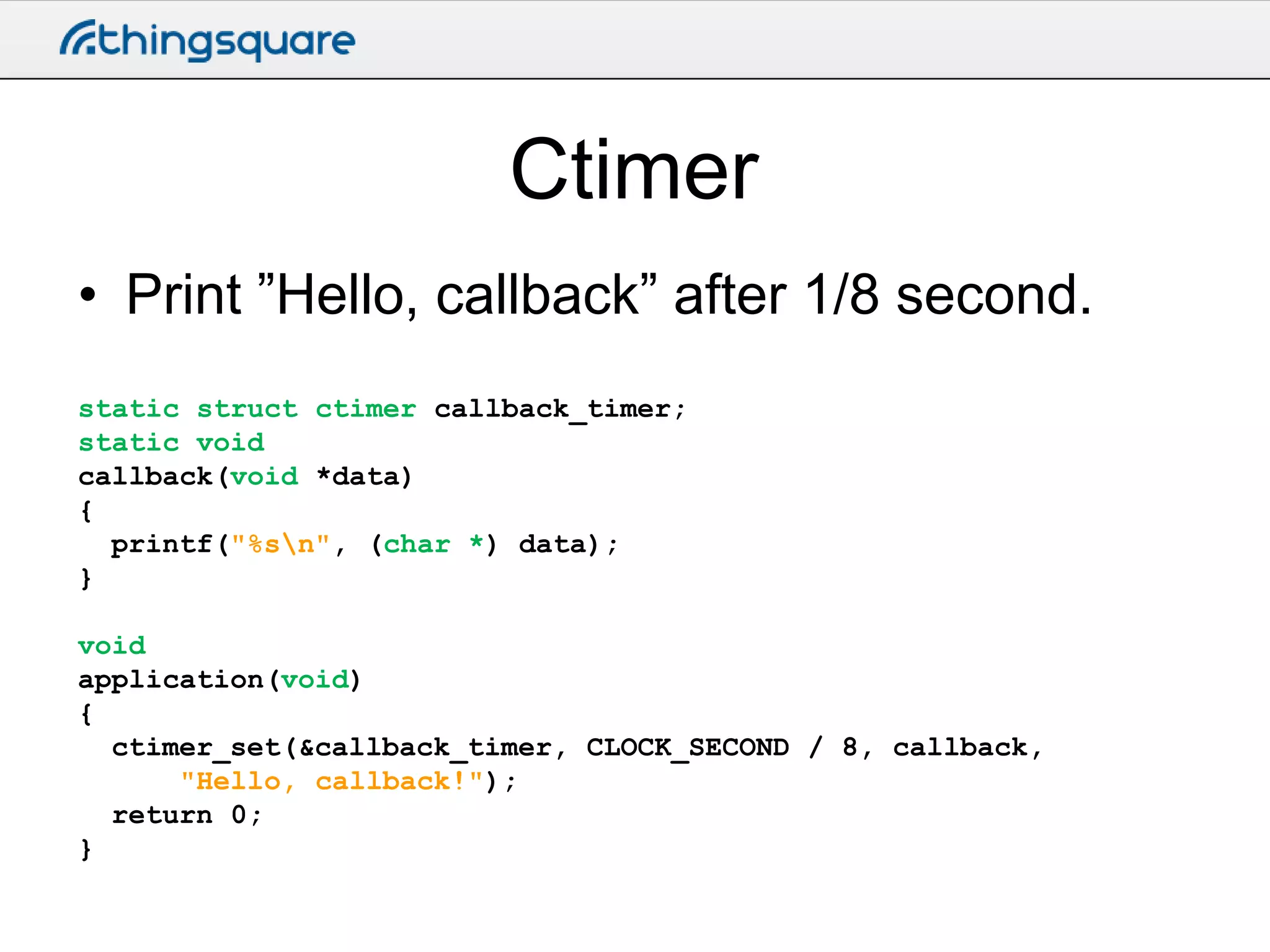
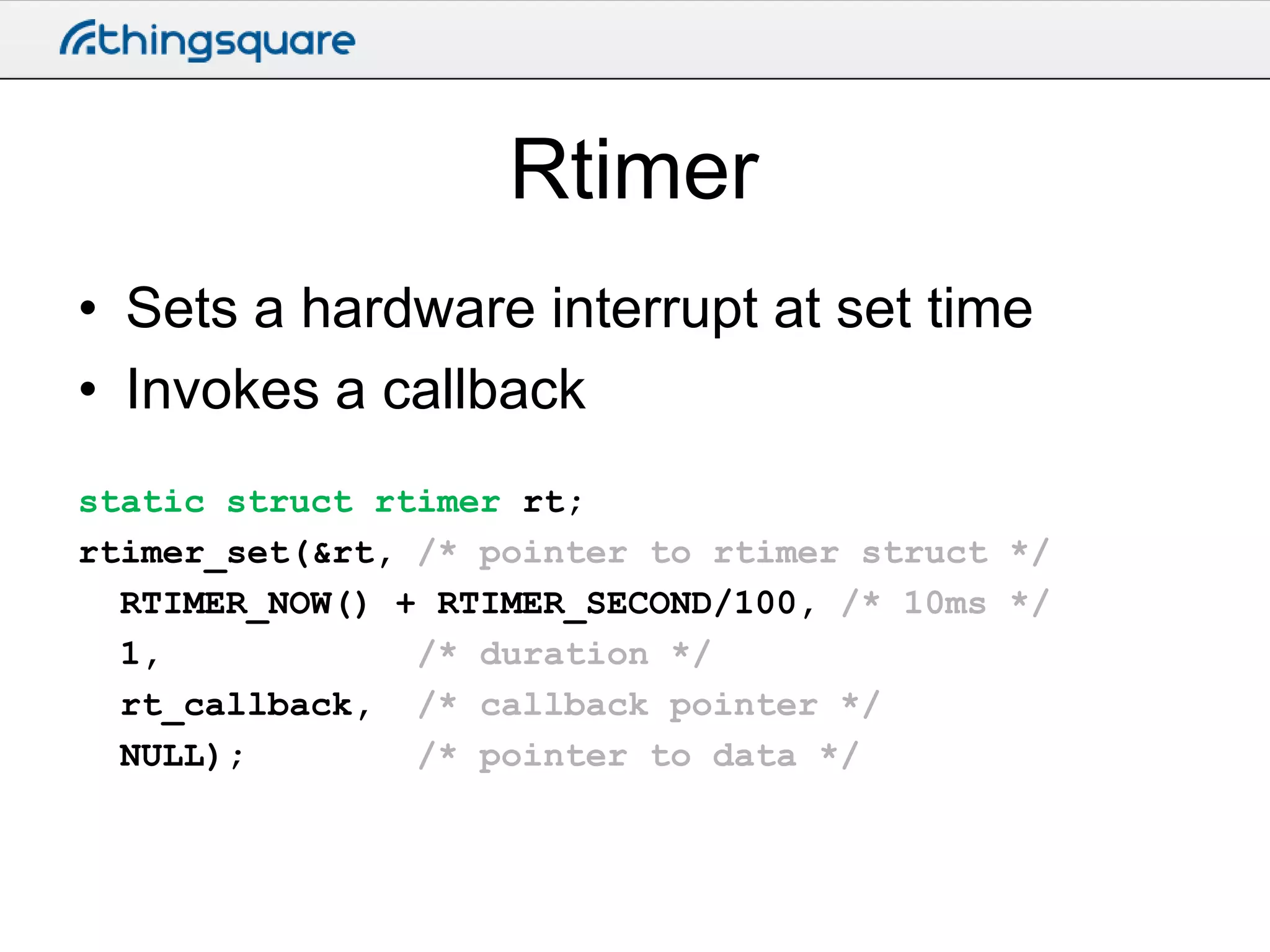
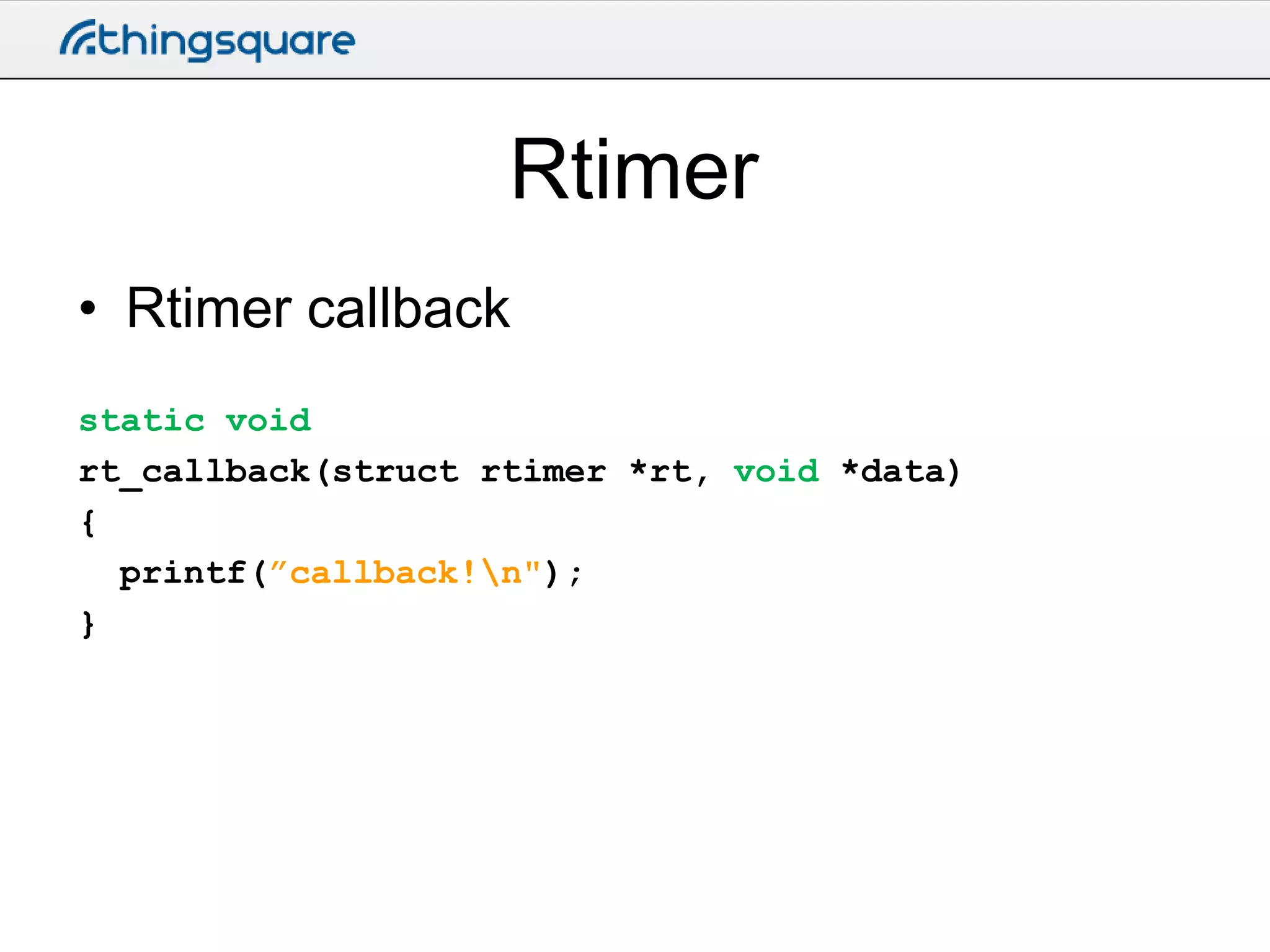
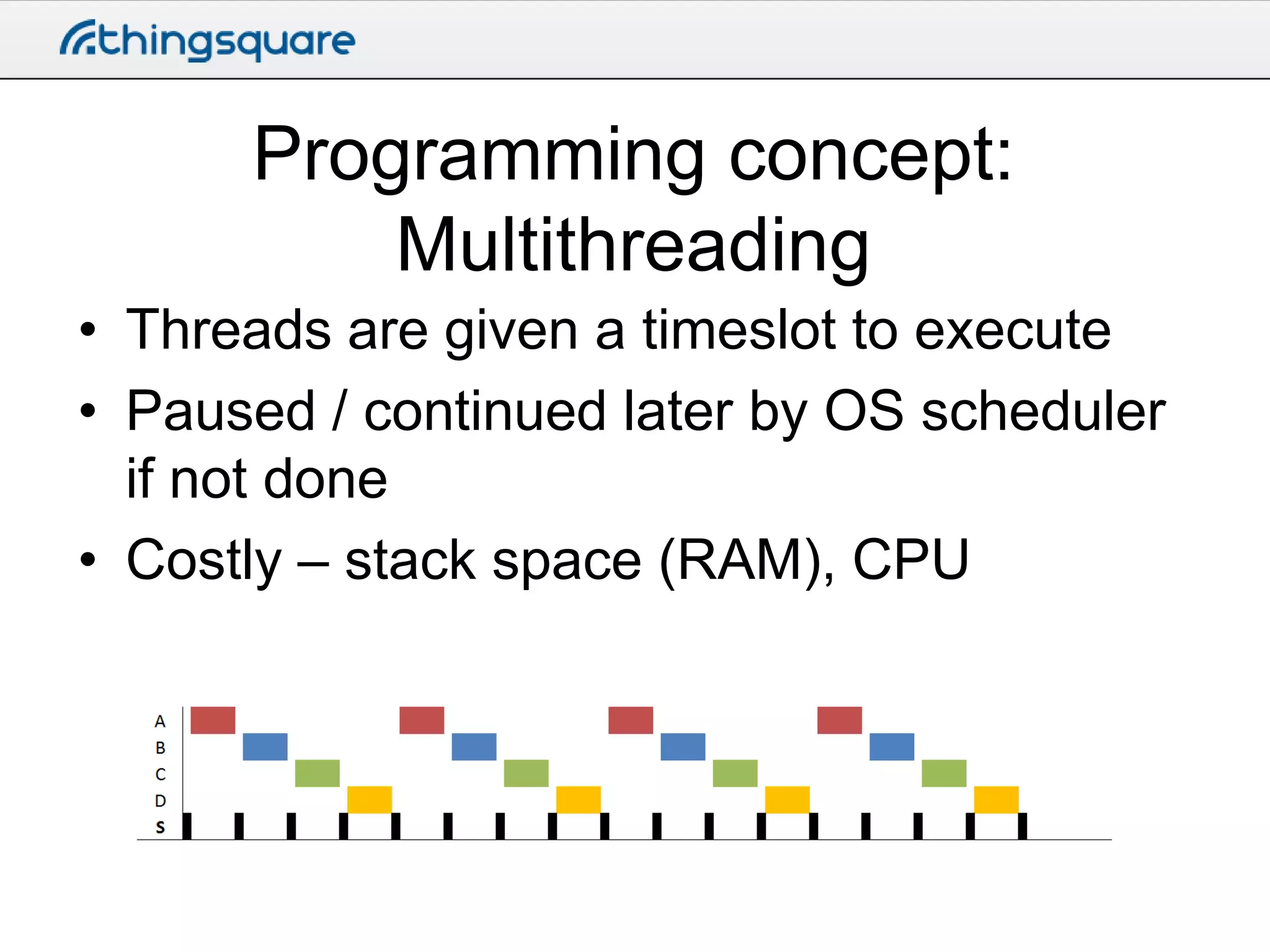
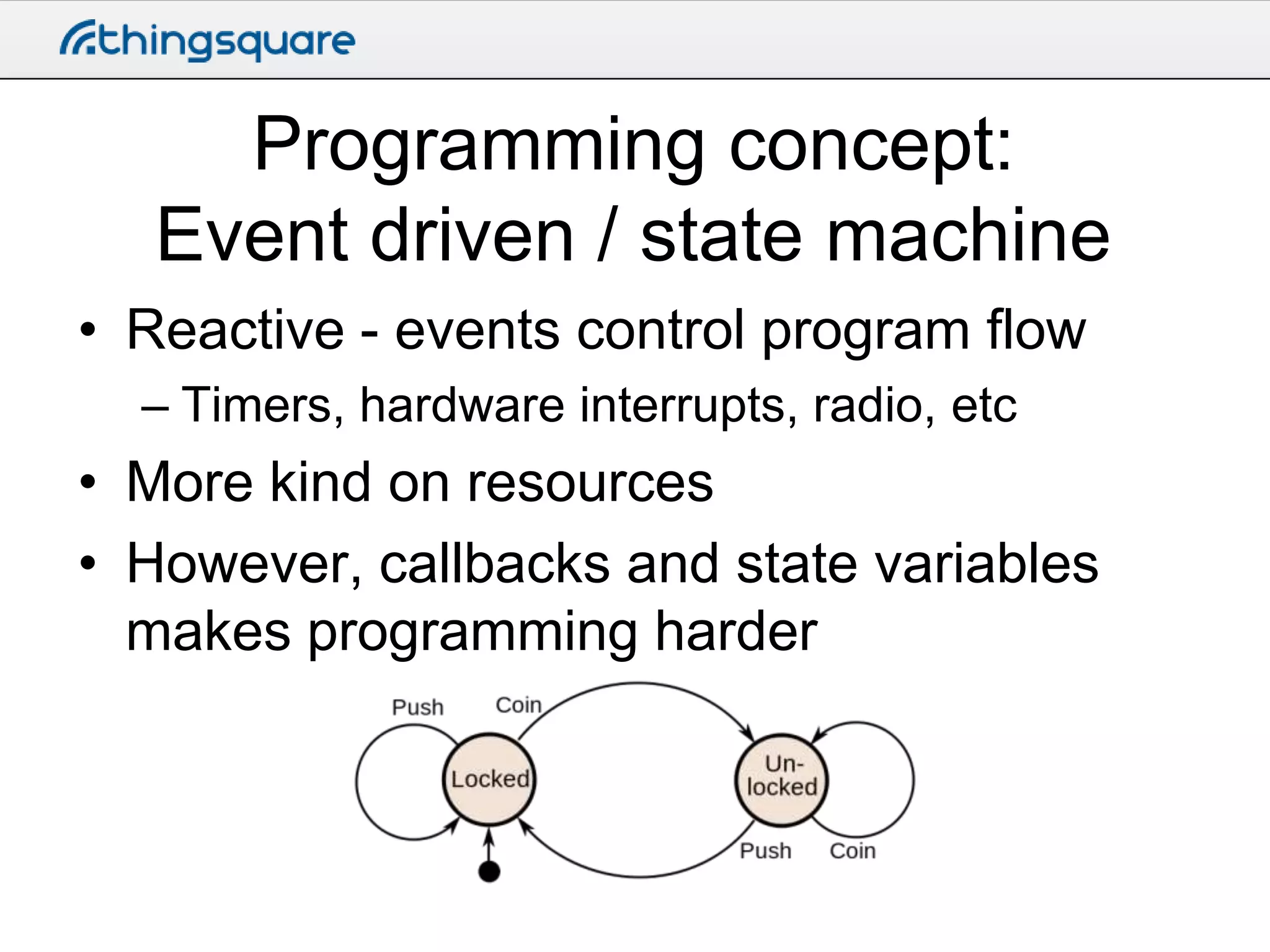
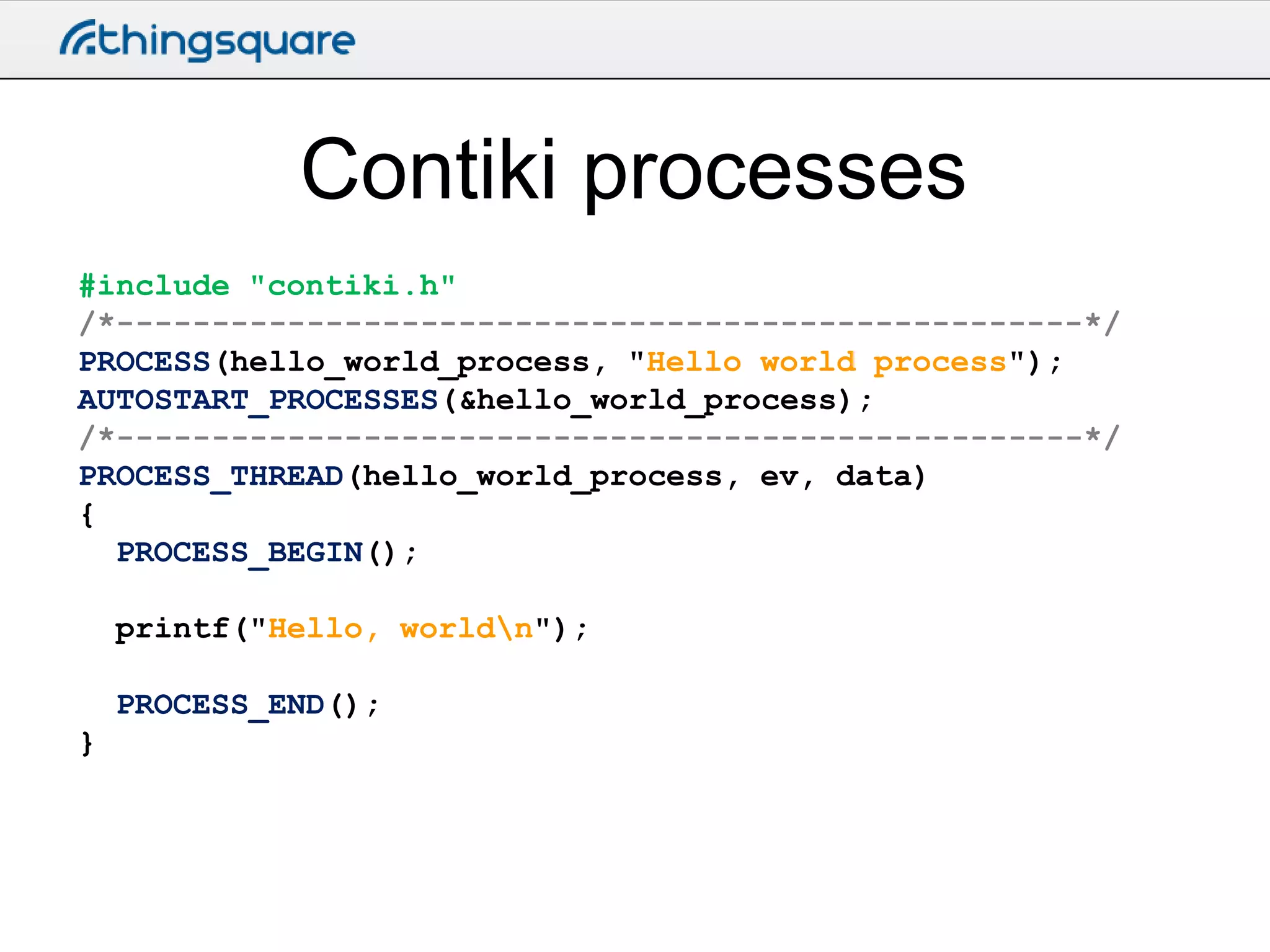
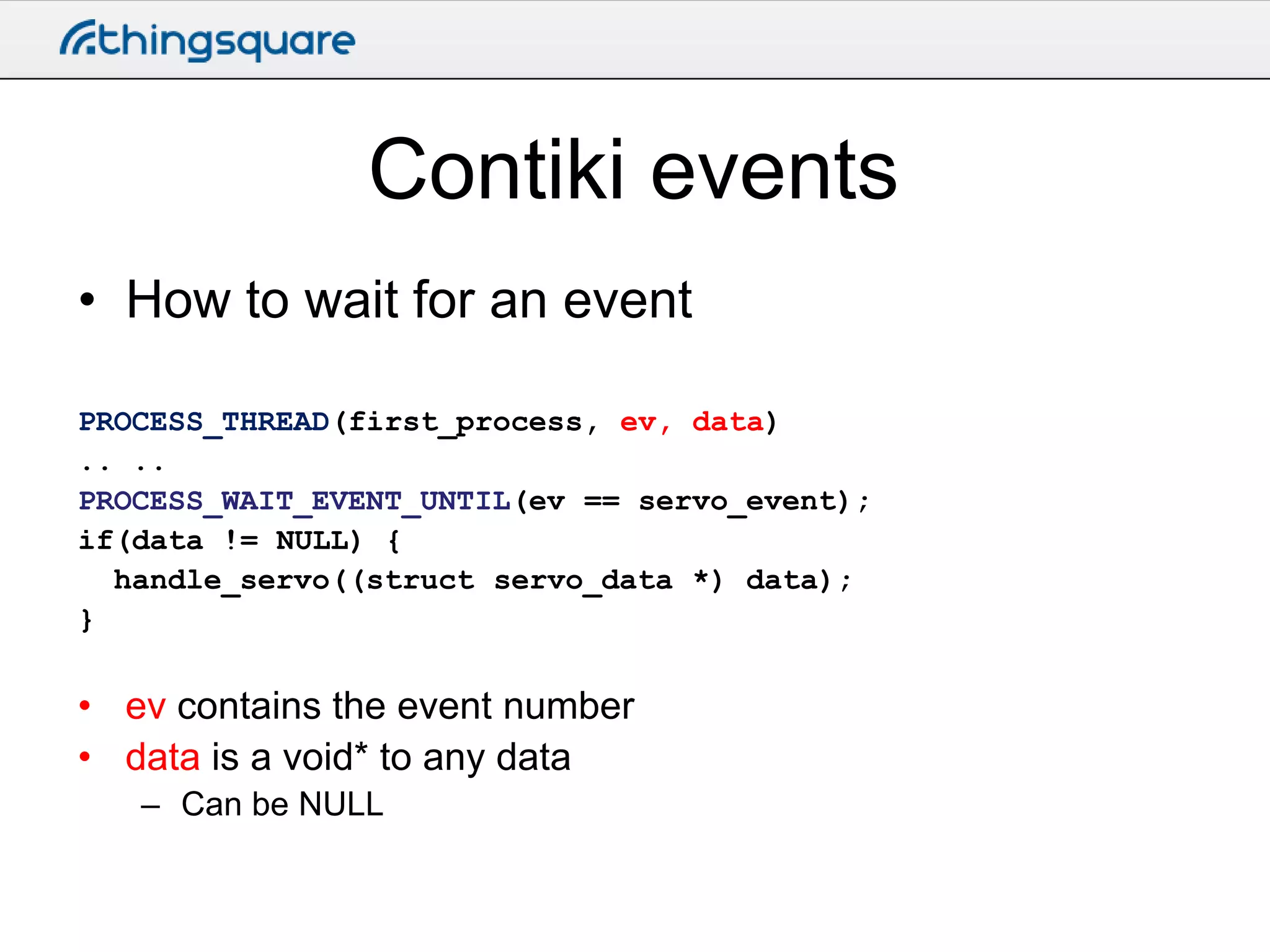
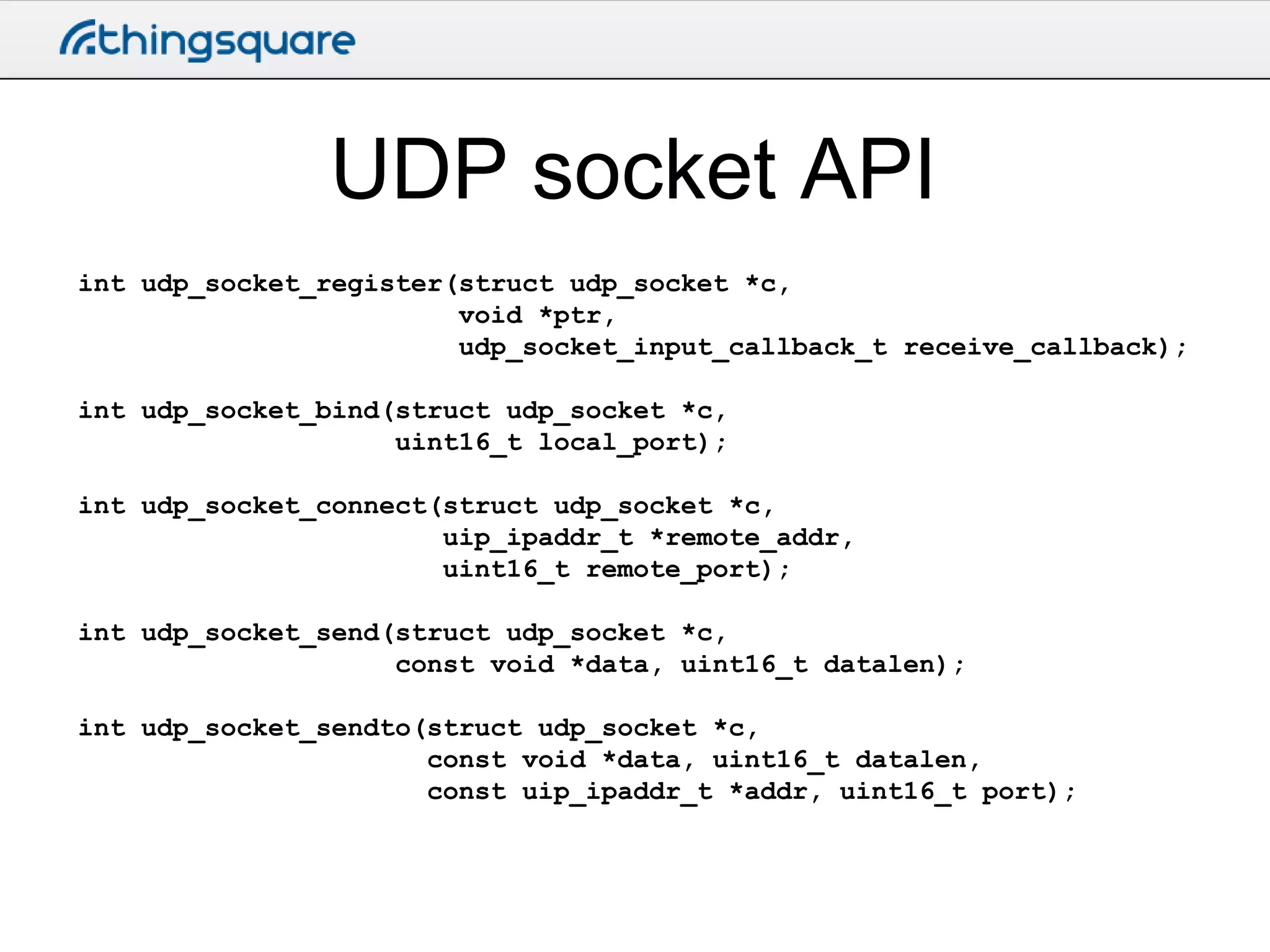
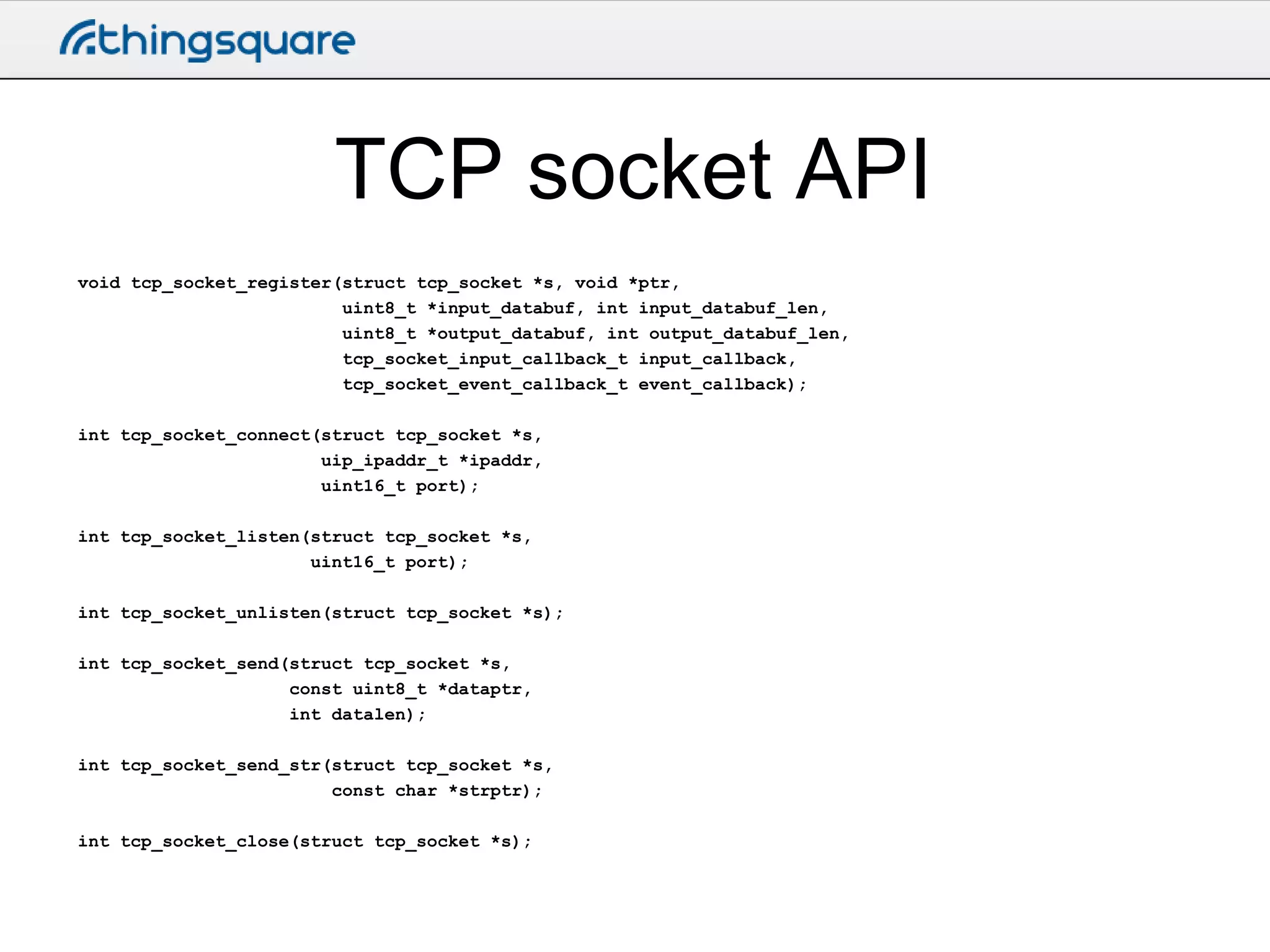
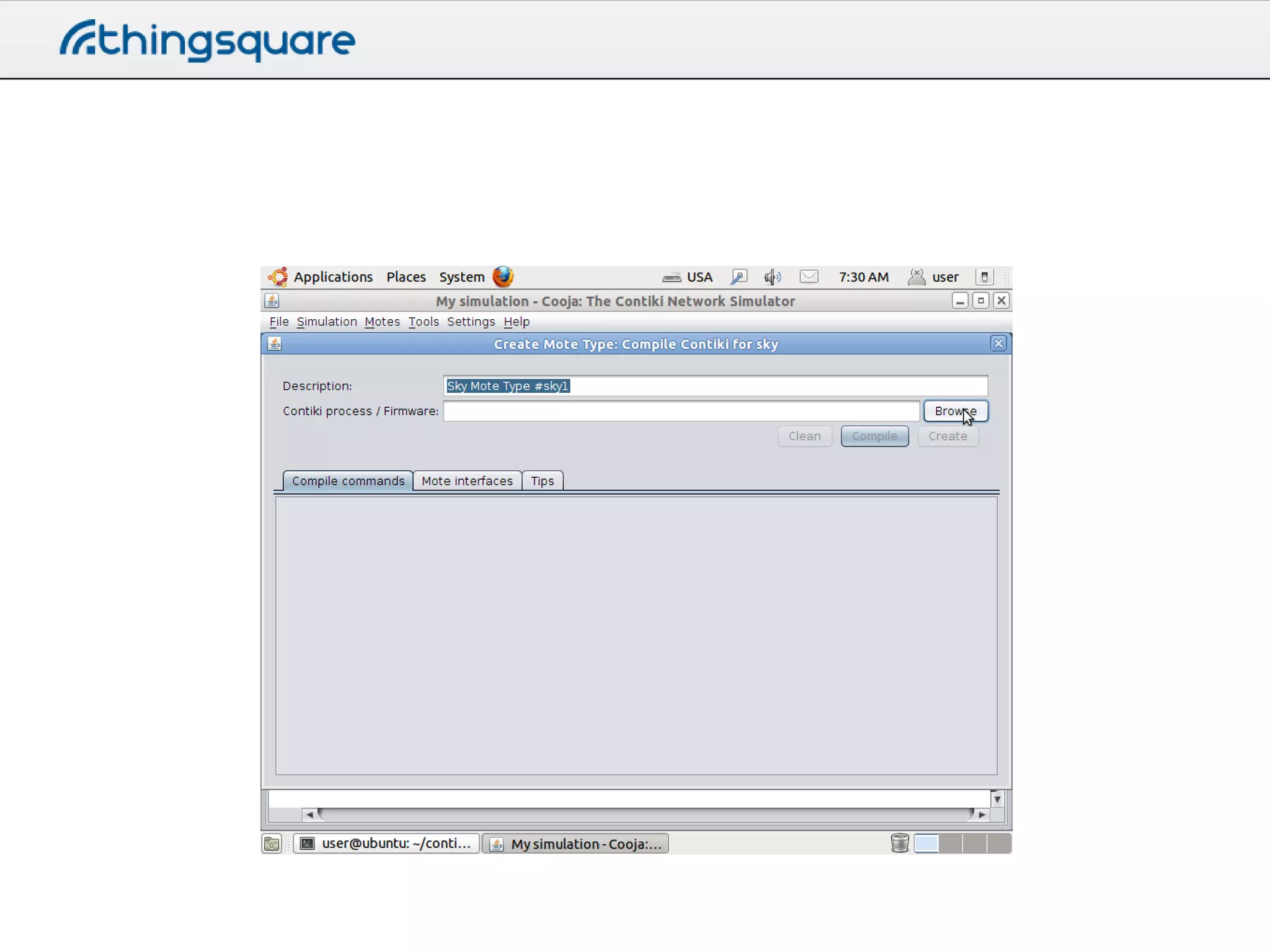
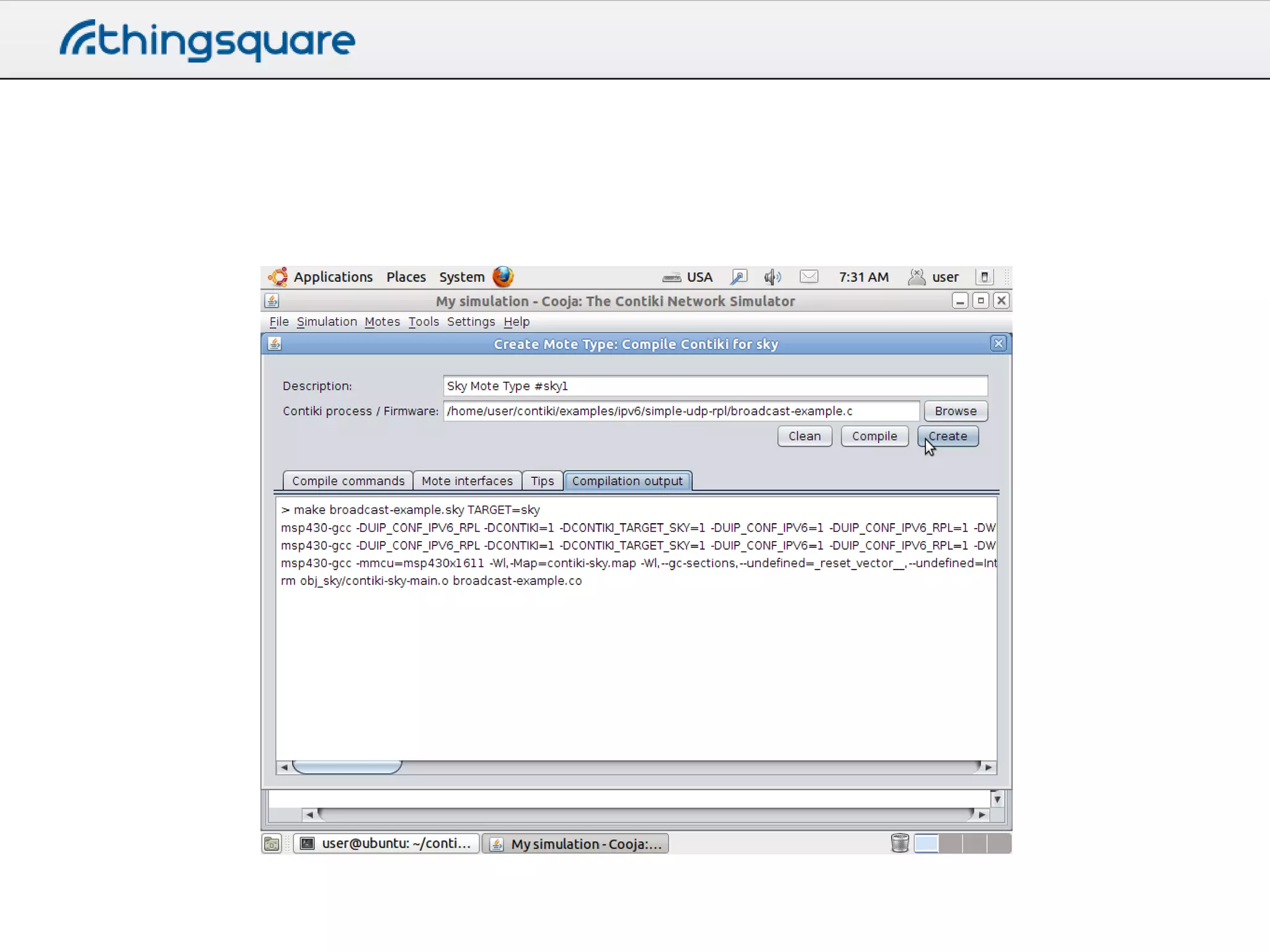
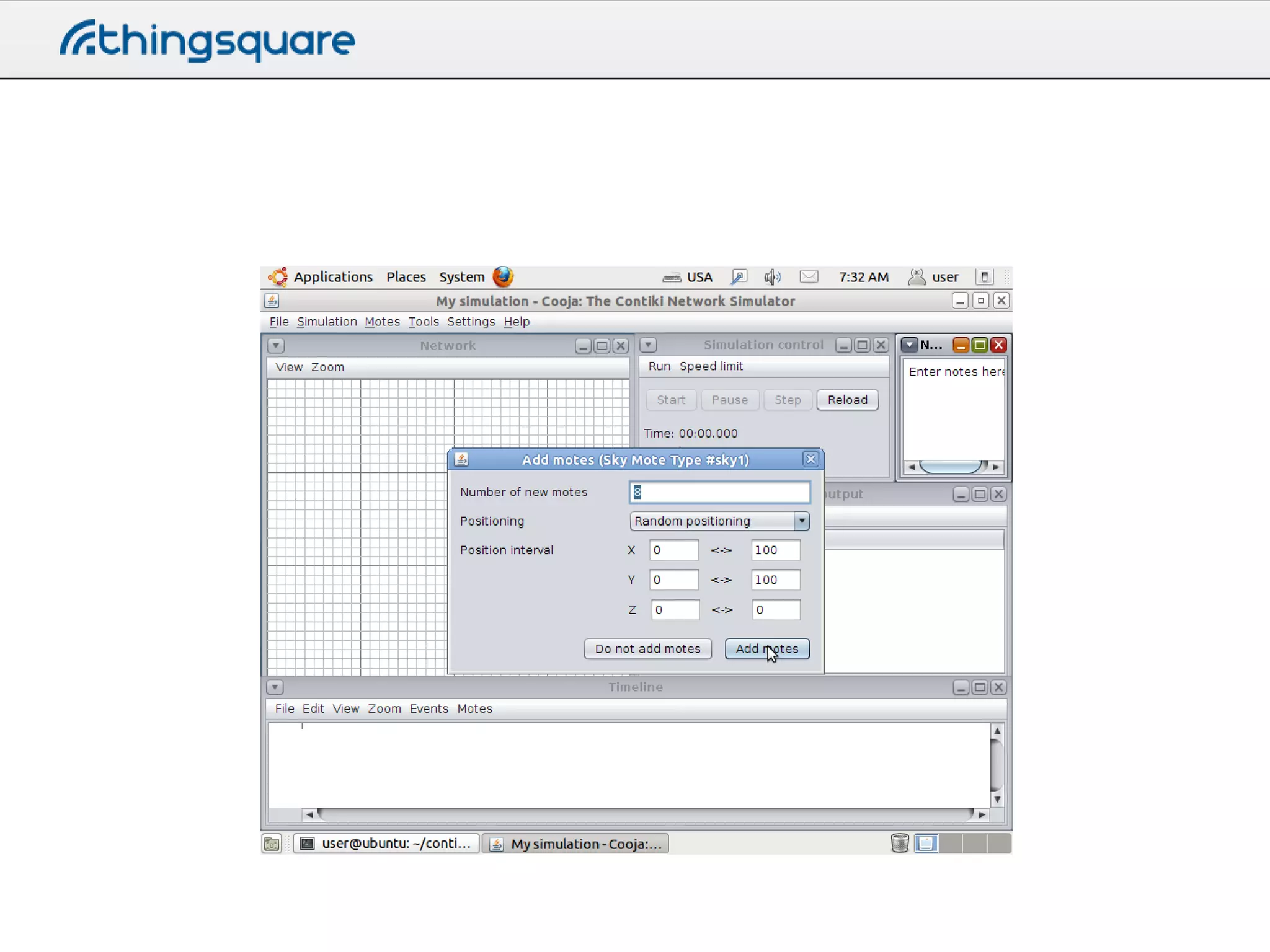
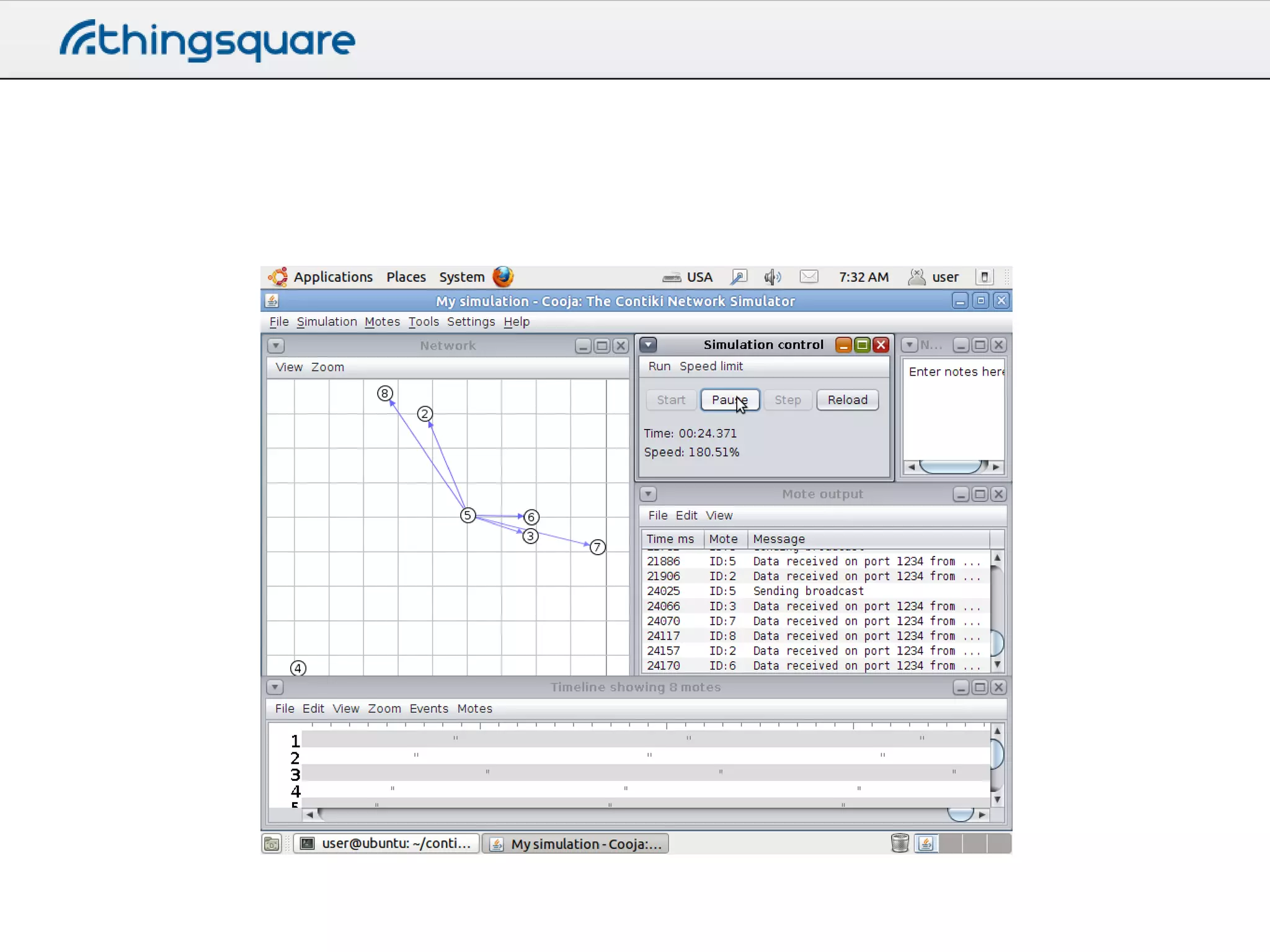

The document details a workshop on building connected devices using Thingsquare and Contiki, covering topics such as protocol operations, memory management, and programming concepts like multithreading and event-driven programming. It explains various timer structures in Contiki, outlines the lightweight process model, and introduces memory management, networking stacks, and the usage of TCP and UDP sockets. Additionally, it discusses practical aspects like firmware image building, configuration, and running simulations with the Cooja simulator.