biomechatronic hand mechanical engineering ppt.ppt
2.
INTRODUCTION
The objectiveis to develop an artificial hand aimed
at replicating the appearance and performance of the
natural hand or to obtain a complete functional
substitution of the natural hand.
Main problems to be solved in order to improve the
performance of prosthetic hands are:
1) lack of sensory information gives to the
amputee
2) lack of “natural” command interface.
3) limited grasping capabilities
4) unnatural movements of fingers during grasping.
3.
DESIGN OF THE
BIOMECHATRONICHAND
• BIOMECHATRONIC DESIGN
• ARCHITECTURE OF THE
BIOMECHATRONIC HAND
• ACTUATION SYSTEM
4.
BIOMECHATRONIC DESIGN
The mainrequirements to be considered
are:
- cosmetics
- controllability
- noiselessness
- lightness
- low energy consumption
5.
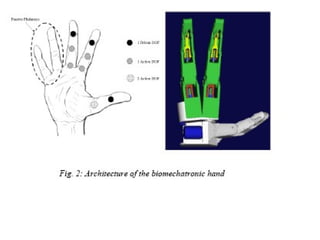
ARCHITECTURE OF THE
BIOMECHATRONICHAND
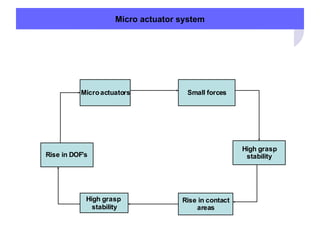
It uses small actuators (two of each finger)
and micro motors instead of one single
large actuator and motor.
7.
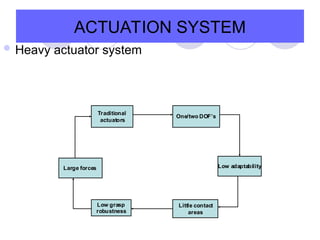
ACTUATION SYSTEM
Heavyactuator system
Traditional
actuators
One/two DOF’s
Low adaptability
Little contact
areas
Low grasp
robustness
Large forces
CONCLUSION
The biomechatronic designapproach can
lead to the development of hand and
prostheses.
It requires low cost and low energy
consumption for adequate autonomy (at
least 8 hours between recharges).