Download to read offline
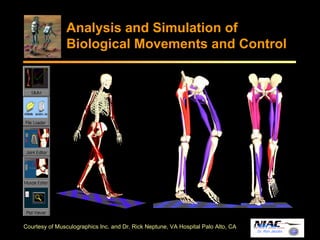
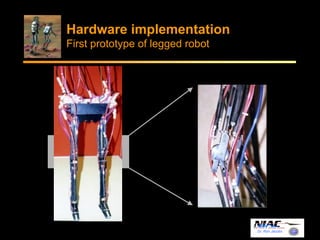
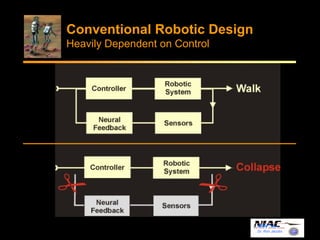
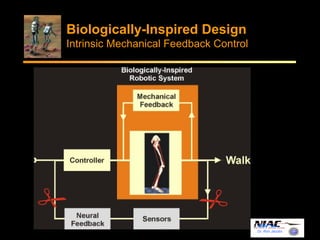
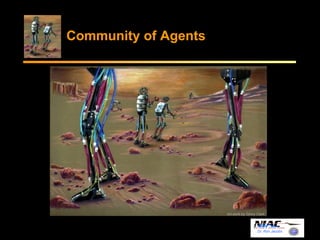
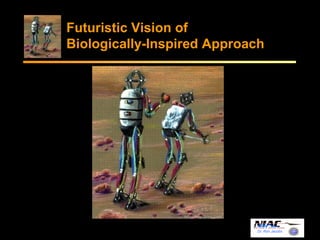

This document discusses a biologically-inspired robot for space operations. It proposes taking a biologically-inspired approach that provides flexibility, versatility, and intelligence through mechanisms and control similar to biological systems. This includes using intrinsic mechanical properties and simple if-then rule-based control. The first prototype demonstrated standing, disturbance rejection, and walking motions using 18 artificial muscles. Future work may include developing advanced artificial muscles, sensors, power sources, and intelligent control to enable autonomous mobility on rough terrain and cooperative problem solving.



































![Wassersug richard[1]](https://cdn.slidesharecdn.com/ss_thumbnails/wassersugrichard1-140914105156-phpapp02-thumbnail.jpg?width=640&height=640&fit=bounds)











