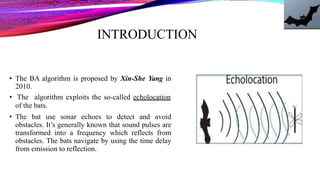
The document summarizes the bat algorithm, which is inspired by the echolocation of bats. It describes how bats use echolocation to detect prey and avoid obstacles. The bat algorithm models this behavior mathematically to solve optimization problems. Key aspects covered include the idealized rules that govern how bats move and adjust pulse rates based on prey proximity. Examples are given of applications in image segmentation and advancements like fuzzy bat algorithms. Advantages of the bat algorithm like automatic zooming and parameter control are contrasted with disadvantages like slow convergence rates.
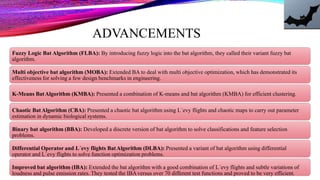
![IDEALIZED RULES OF BA
All bats use echolocation to sense distance, and they also ‘know’ the difference
between food/prey and background barriers in some magical way.
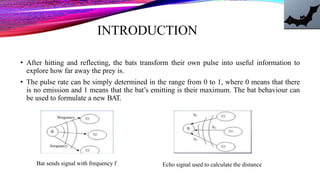
Bats fly randomly with velocity vi at position xi with a fixed frequency fmin, varying
wavelength λ and loudness A0 to search for prey. They can automatically adjust the
wavelength of their emitted pulses and adjust the rate of pulse emission r λ [0,1],
depending on the proximity of their target.
Although the loudness can vary in many ways, we assume that the loudness varies
from a large (positive) A0 to a minimum constant value Amin.
1
2
3](https://image.slidesharecdn.com/batalgorithm-1605011212371-220930231622-2dd9621d/85/batalgorithm-160501121237-1-pptx-4-320.jpg)
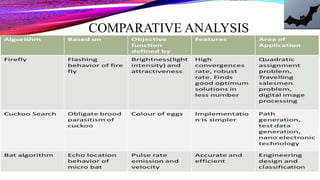
![MATHEMATICAL EQUATIONS
• Generating new solutions is performed by moving virtual bats according to the following equations:
• where β∈ [0,1] is a random vector drawn from a uniform distribution.
• Here x* is the current global best location (solution) which is located after comparing all the solutions
among all the bats.](https://image.slidesharecdn.com/batalgorithm-1605011212371-220930231622-2dd9621d/85/batalgorithm-160501121237-1-pptx-5-320.jpg)
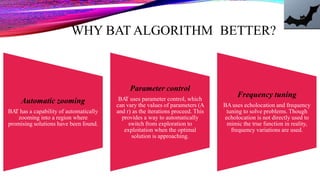
![• The current best solution according the equation:
where 𝜕 ∈[-1,1] is a random number, while At is the average loudness of all the best at this time
step.
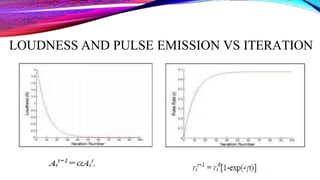
• As the loudness usually decreases once a bat has found its pray, while the rate of pulse
emission increases, the loudness can be chosen as any value of convenience.
Frequency [20KHZ-500KHZ] Wavelength [0.7mm-17mm]](https://image.slidesharecdn.com/batalgorithm-1605011212371-220930231622-2dd9621d/85/batalgorithm-160501121237-1-pptx-6-320.jpg)
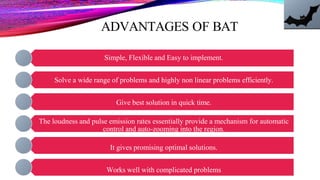
![EXAMPLE- SEGMENTATION
where
The multilevel thresholding problem can be configured as a
k-dimensional optimization problem, for determination of k
optimal thresholds [t1, t2 ,..., tk ] which optimizes an objective
function.
L gray levels in a given image I having M pixels and these
grey levels are in the range {0,1,...L-1}.
The objective function is determined from the histogram of
the image, denoted by h(i) , i= 0, 1,2, …. L-1 , where h(i)
represents the number of pixels having the gray level i.
The normalized probability at level i is defined by the ratio
Pi = h(i) /M .](https://image.slidesharecdn.com/batalgorithm-1605011212371-220930231622-2dd9621d/85/batalgorithm-160501121237-1-pptx-10-320.jpg)