This thesis proposes and evaluates a compressive sensing (CS)-based indoor positioning and tracking system using received signal strength (RSS) from wireless local area network access points. The system is designed and implemented on mobile devices with limited resources.
In the offline phase, RSS fingerprints are collected and clustered using affinity propagation. In the online phase, coarse localization is done by matching RSS measurements to precomputed clusters, and fine localization refines the position using CS recovery on the sparse location signal.
An indoor tracking system is also presented, which integrates the CS-based positioning with a Kalman filter for sequential location estimates. Experimental results on two testbeds show the system achieves better accuracy than other fingerprinting methods, suitable for implementation

![List of Tables
1.1
Existing RSS-based WLAN Position Systems [1] . . . . . . . . . . . . . .
5
1.2
Comparison of a PDA and a laptop . . . . . . . . . . . . . . . . . . . . .
8
6.1
Devices Specifications . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
70
7.1
Comparison of experimental sites . . . . . . . . . . . . . . . . . . . . . .
78
7.2
Traces Summary . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
81
7.3
Actual parameters γ (o) used for experiments on Bahen fourth floor. . . .
87
7.4
A set of optimal parameters for the CS-based position system applied on
Bahen fourth floor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.5
Position error statistics for different methods on Bahen fourth floor. (For
validation set) . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.6
94
A set of optimal parameters for the CS-based position system applied on
CNIB second floor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
7.8
94
Position error statistics for different methods on Bahen fourth floor. (For
stationary user testing set) . . . . . . . . . . . . . . . . . . . . . . . . . .
7.7
93
99
Positioning error statistics for different positioning methods on CNIB second floor. (For mobile user testing set) . . . . . . . . . . . . . . . . . . . 100
7.9
A set of optimal parameters for the proposed tracking system applied on
CNIB second floor. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . 103
viii](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-8-2048.jpg)

![List of Figures
1.1
The problem setup . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
6
2.1
Kernel-based method [2]. . . . . . . . . . . . . . . . . . . . . . . . . . . .
20
3.1
Block diagram of the proposed indoor localization system. . . . . . . . .
29
3.2
Interaction between the database server and the mobile device during offline phase.
3.3
. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
34
Interaction between the database server and the mobile device during online phase. . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
44
4.1
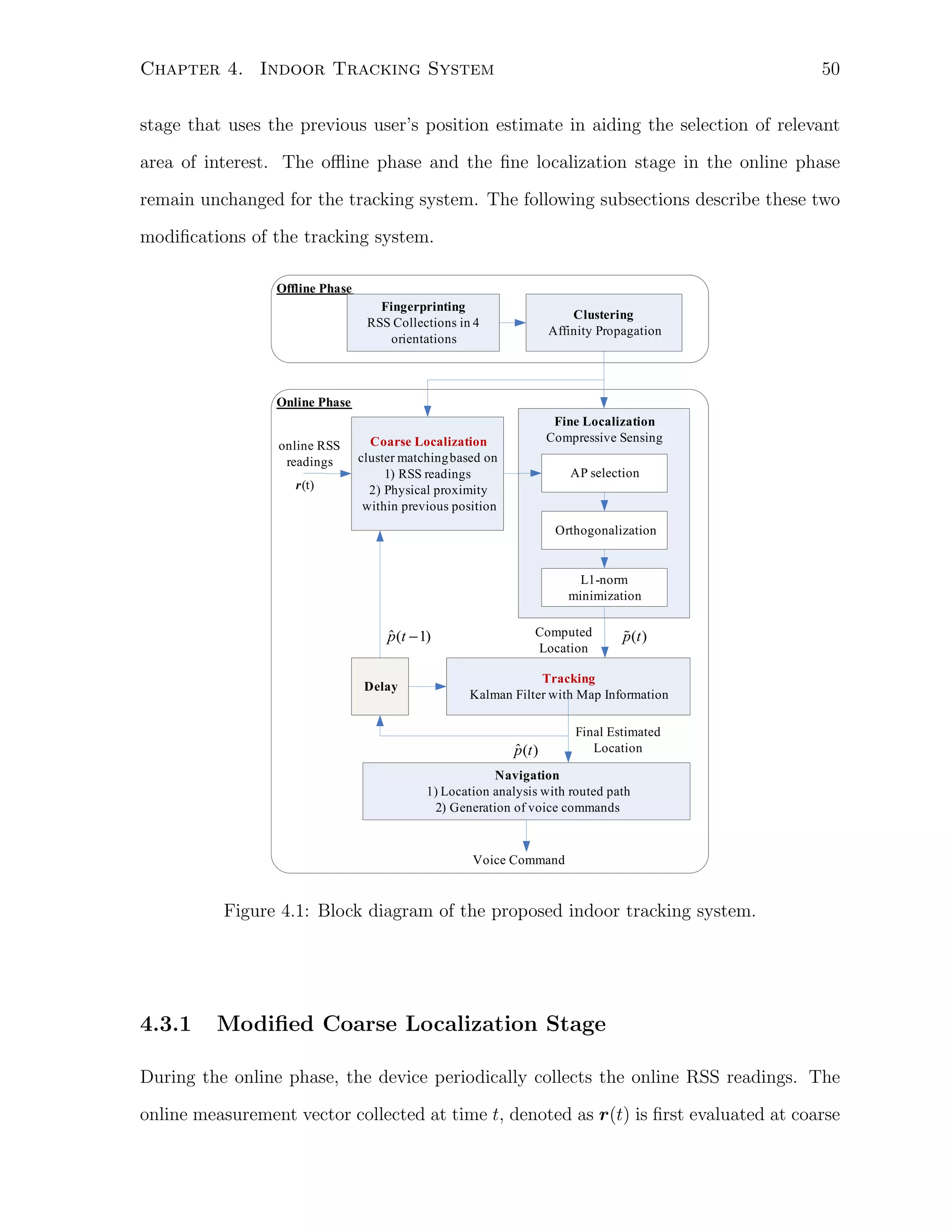
Block diagram of the proposed indoor tracking system. . . . . . . . . . .
50
4.2
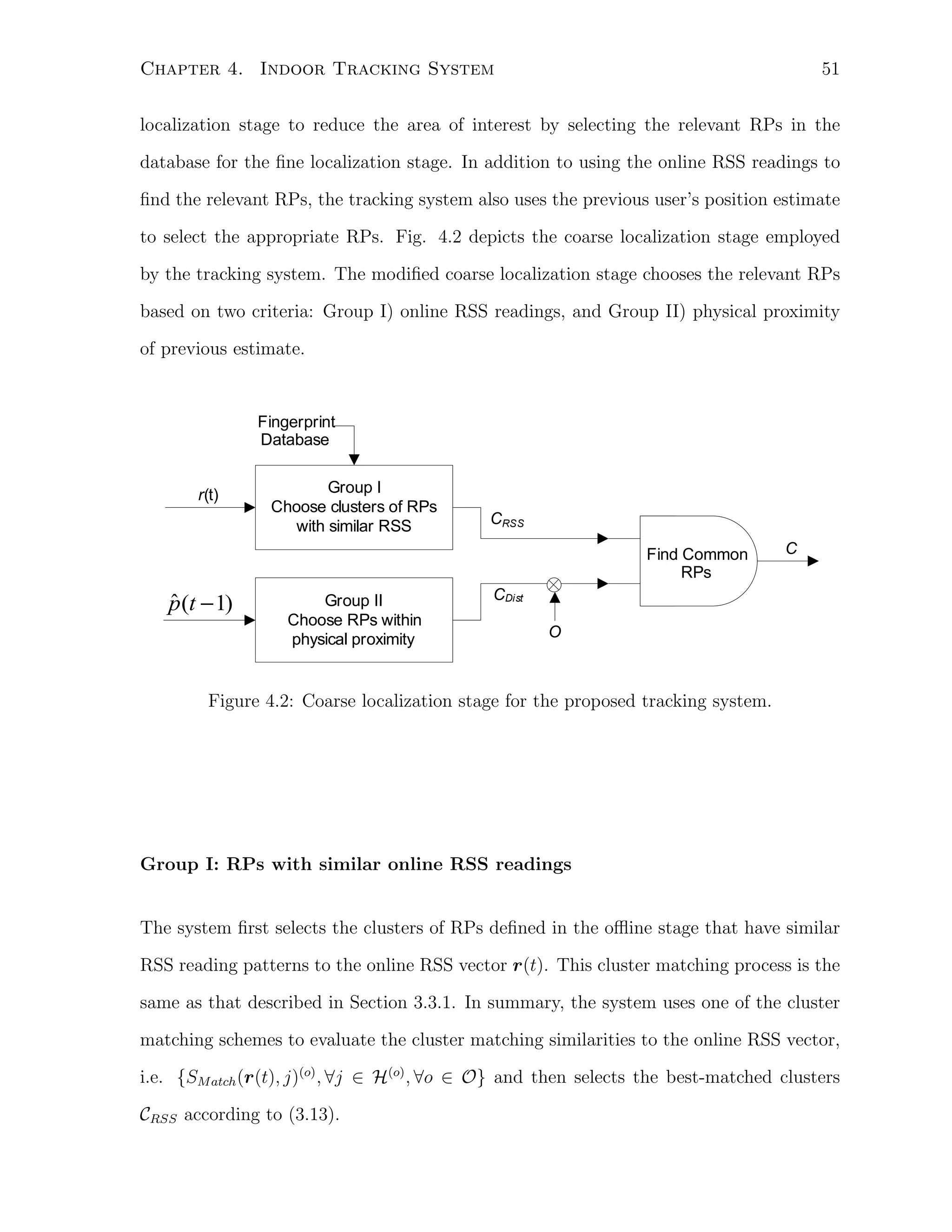
Coarse localization stage for the proposed tracking system. . . . . . . . .
51
4.3
Map-Adoptive Kalman Filter . . . . . . . . . . . . . . . . . . . . . . . .
57
5.1
Navigation System Overview . . . . . . . . . . . . . . . . . . . . . . . . .
60
5.2
Dijkstra Algorithm . . . . . . . . . . . . . . . . . . . . . . . . . . . . . .
63
5.3
Tracking update analysis . . . . . . . . . . . . . . . . . . . . . . . . . . .
64
5.4
A point in close range to a line segment . . . . . . . . . . . . . . . . . . .
65
5.5
Determining the direction of turn based on the two line segments ℓi and ℓi+1 67
6.1
The overview of the software design. Arrows shows the dependency of the
libraries and blue colored boxes are the developed modules for the software. 72
6.2
An example screenshot of Detect AP operation. . . . . . . . . . . . . . .
x
73](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-10-2048.jpg)
![Chapter 1
Introduction
1.1
Motivation
With the wide deployment of the mobile wireless systems and networks, the locationbased services (LBSs) are made possible on mobile devices, such as laptops, smartphones
and personal digital assistants (PDAs). There are a lot of applications that rely on the
locations of these mobile devices, such as navigation, people and assets tracking, locationbased security and coordination of emergency and maintenance responses to accidents,
interruptions of essential services and disasters, etc [3–5].
In order to deliver reliable LBSs, real-time and accurate user’s locations must be obtained. Hence, there is a growing interest in developing effective positioning and tracking
systems. For the outdoor environment, Global Positioning System (GPS) and cellular
network based systems [3,6,7] are commonly used as the techniques to provide navigation
services. However, these techniques cannot be used directly in indoors, as the signals are
usually too weak to be used for localization purposes. Thus, wireless indoor positioning
has become an increasingly popular research topic in recent years.
There are several methods that are built on top of the GPS-capable phones to provide
indoor localization [8]. One example is the Assisted GPS (A-GPS), which requires a
1](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-14-2048.jpg)
![Chapter 1. Introduction
2
connection to a network location server in order to obtain the estimated location with
an average of 5-50m accuracy [8]. Another one is the Calibree proposed in [9], which
utilizes the detected signal strength from GSM cell towers to determine relative positions
of mobile phones and their absolute locations can be determined if some of the phones are
equipped with GPS receivers. In addition, indoor localization can also be implemented
on GSM mobile phones [10] and CDMA mobile phones [11] through the use of wide
signal-strength fingerprints. The median errors of these cellular-based system are around
4-5m. Although these methods are able to provide moderately accurate position estimate
in indoors, their accuracies may not be enough to provide reliable LBSs and also they
are only applicable to mobile phones.
Besides the use of GPS and cellular network, different types of wireless technologies
and sensors are also employed for the indoor positioning. In particular, positioning
systems using ultra-wide band (UWB) signals, infrared, radio frequency (RF), proximity
sensors and ultrasound systems [1, 8, 12] are able to localize users with high accuracies.
However, these systems require the installation of additional infrastructures and sensors,
which lead to high budget and labour cost and preventing them from having large-scale
deployments.
Due to the wide deployment of wireless local area network (WLAN), which is specifically referred to as the IEEE 802.11b/g standard in this thesis, there are many indoor
positioning systems that make use of WLAN for estimating user’s position. Time of arrival (TOA) [13] and time difference of arrival (TDOA) [1,14] are two techniques that can
be used for localization, but they require extra configuration and setup to provide valid
measurements. Thus, received signal strength (RSS) is the feature metric used for the
WLAN positioning systems, as it can be obtained directly from existing WLAN access
points (APs) by any device that is equipped with a WLAN network adapter.
This thesis presents an accurate RSS-based WLAN positioning and tracking system
that can be implemented on mobile devices with limited resources. The affinity propa-](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-15-2048.jpg)
![Chapter 1. Introduction
3
gation algorithm for clustering data points [15] and the compressive sensing theory for
recovery of the sparse and incoherently sampled signals [16] are two concepts applied on
the proposed system.
1.2
RSS-based WLAN Positioning Systems
The WLAN IEEE 802.11b/g is a standard used for providing wireless internet access for
indoor areas. It is operated at 2.4 GHz Industrial, Scientific and Medical (ISM) band
within a range of 50-100 m. As mentioned earlier, the RSS can be easily obtained by
using any WLAN-integrated device, thus it is used by most of the WLAN positioning
systems.
1.2.1
Location-Sensing Techniques
There are three major techniques to obtain the location estimate from the RSS [8, 17].
They are listed as follows:
1. Triangulation: The RSS can be translated into distance from the particular AP
according to a theoretical or empirical signal propagation model. Then, with distance measurements from at least 3 APs with known positions, lateration can be
performed to estimate the locations. This approach does not give accurate estimate, as the indoor radio propagation channel is highly unpredictable and thus the
use of the propagation model is not reliable.
2. Proximity: This method finds the strongest RSS from a specific AP and determines
the location to be the region covered by this AP. This method only gives a very
rough position estimate but it is easy to be implemented.
3. Scene Analysis: This method first collects RSS readings at known positions, which
are referred to as fingerprints, in the area of interest. Then, it estimates the loca-](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-16-2048.jpg)
![Chapter 1. Introduction
4
tions by comparing the online measurements with the fingerprints through pattern
recognition techniques. This method is used by most WLAN positioning systems,
as it is able to compute accurate location estimates. This is the approach used by
the positioning and tracking system proposed in this thesis.
1.2.2
Existing Positioning Systems
Table 1.1 summarizes some of the existing WLAN positioning systems that can be accessible to the public. It shows that the use of fingerprinting achieves the best accuracy
in indoor areas. Although the Ekahau [18] attains the best accuracy, it uses the the
probabilistic method to compute the estimated positions and thus requires a more comprehensive survey of RSS readings in the region of interest. In addition, its position
calculation is computed at the server as the complexity of the probabilistic method is
too high to be performed on the mobile devices. This raises additional issues when using
this systems. First, the devices must be connected to the same network as the server to
obtain position estimates. Second, positions obtained from the server must be encrypted
before it is transmitted to the mobile devices, in order to protect the privacy of the users.
The aim of this thesis is to design an indoor positioning and tracking system that
can provide accurate position estimate with relatively low computational complexity, so
that it can be computed on mobile devices. This solution may have a database server
to keep track of the fingerprints database collected, but once downloaded to the devices,
they are no longer required to be connected to the server to obtain position estimates.
This system is more flexible and has no privacy concerns to the users.
1.3
Problem Statement and Objectives
A typical WLAN indoor tracking scenario as illustrated in Fig. 1.1 consists of 1) a
mobile device equipped with a WLAN adapter, which is carried by a user and collects](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-17-2048.jpg)
![5
Chapter 1. Introduction
Microsoft
Research Ekahau [18]
RADAR [19, 20]
Inter Place Lab and
Skyhook’s WPS [21]
Range
Building/local area
Building/local area
Position
Mobile device
Server (Ekahau Posi- Mobile device
Calculation
Metropolitan area
tioning Engine)
Position
Fingerprinting
+ Fingerprinting
+ Map-based pinpoint-
Method
KNN + Viterbi-like probabilistic
ing (obtain APs data
algorithm
by war driving) and
triangulation
Accuracy
3-5m
1-3m
20+ m
Table 1.1: Existing RSS-based WLAN Position Systems [1]
RSS from detectable access points for localization; 2) access points (APs), which can be
commonly found in most buildings and their exact positions are not necessarily known
to the localization systems, as they may belong to different network groups and possibly
3) a database server, which stores the fingerprints collected by the mobile device. The
WLAN-enabled device can extract information, such as MAC address, SSID and received
signal strength (RSS) about these APs by receiving messages broadcasted from them.
This thesis focuses on the WLAN localization and tracking problem using RSS as the
measurement metric. The mobile device carried by the user collects the RSS from L
different APs whose unique MAC addresses are used for identification. Then, the system
determines the current position based on this RSS measurements and previously collected
fingerprint database.
The goal of this thesis is to propose a real-time WLAN positioning and tracking system
that can give accurate position estimate and can be implemented on mobile devices, so
that LBSs can be applied. In the context of this thesis, the mobile devices refer to the
handheld devices, such as personal digital assistants (PDAs) and smartphones, which](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-18-2048.jpg)
![6
Chapter 1. Introduction
Reference Point
WLAN
Access Point
User equipped with
mobile device
Database Server
000
Figure 1.1: The problem setup
have degraded WLAN antennas, limited power, memory and computation capabilities,
thus a light-weight algorithm is required to allow these devices to have real-time and
accurate performance.
The localization problem is defined as follow. First, the device collects online RSS
readings from available APs periodically at a time interval ∆t, which is limited by the
device’s network card and hardware performances. These online RSS readings can be
denoted as r(t) = [r1 (t), r2 (t), . . . , rL (t)], t = 0, 1, 2, ..., where rl (t) refer to the RSS
reading collected from AP l at time t. Then, the proposed positioning and tracking
system uses r(t) to compute the position estimate, denoted as p(t) = [ˆ(t), y (t)]T , where
ˆ
x
ˆ
(ˆ(t), y (t)) are the Cartesian coordinates of the estimated position at time t.
x
ˆ
1.4
Technical Challenges
The unpredictable variation of RSS in the indoor environment is the major technical
challenge for the RSS-based WLAN positioning systems. There are four main reasons
that lead to the variation of RSS. First, due to the structures of the indoor environment
and the presence of different obstacles, such as walls and doors, etc, the WLAN signals
experience severe multi-path and fading and the RSS varies over time even at the same
location. Secondly, since the WLAN uses the licensed-free frequency band of 2.4GHz,
the interference on this band can be very large. Example sources of interference are the](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-19-2048.jpg)
![Chapter 1. Introduction
7
cordless phones, BlueTooth devices and microwave. Moreover, the presence of human
bodies also affects the RSS by absorbing the signals [22], as human bodies contain large
amount of water, which has the same resonance frequency as the WLAN. Finally, the
orientation of the measuring devices also affects the RSS, as orientation of antenna affects
the antenna gain and the signal is not isotropic in real indoor environment.
All of the above reasons make it infeasible to find a good radio propagation model
to describe the RSS-position relationship. Thus, a fingerprinting method is often used
instead to characterize the RSS-position relationship. This method computes the position
estimate by matching the online RSS readings to the fingerprints collected during training
phase. This pattern matching process is a non-trivial problem as there are derivations
between the online RSS readings to the fingerprint RSS readings due to the time-varying
characteristics of the indoor radio propagation channel. In addition, the movement of
objects, including the movement of the user who carries the mobile device, also affects
the RSS readings. This type of variation of RSS is needed to be addressed by the
fingerprinting-based positioning systems, in order to provide accurate position estimate.
Another challenge relates to the computational capabilities of the mobile devices.
Table 1.2 compares the processor speed and memory equipped by a PDA, which is used
in this thesis to evaluate the performance of the proposed positioning system and a
labtop with average performance. It shows that the PDA has very limited computation
speed and memory when comparing to the labtop. Thus, some of the positioning systems
that can be implemented on the laptop may not be able to be used by the PDA. The
computational complexity and the use of memory must be taken into consideration when
designing the positioning and tracking systems in this thesis.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-20-2048.jpg)
![Chapter 1. Introduction
1.6
10
Contributions
This thesis proposes and implements a two stages indoor RSS-based WLAN positioning, tracking and navigation system using compressive sensing, clustering and filtering
techniques. Here are the list of contribution, including the chapters presenting them and
publications referring to them:
1. Compressive sensing based positioning system: This positioning system applies the affinity propagation algorithm on the collected fingerprint database to
generate clusters of RPs, which have similar RSS values and are geographically
close to each other. Then, such system uses the coarse localization stage to choose
the relevant clusters of RPs, based on the online RSS measurement. Finally, the localization problem is translated into a sparse signal problem, so that the estimated
position can be computed by solving a ℓ1 norm minimization problem according to
the compressive sensing theory. (Chapter 3 and [23, 24])
2. Tracking system: The CS-based positioning system can be easily extended to
include the previous position estimate and the map information to improve its
performance. The tracking system has a modified coarse localization stage. In
addition to the clusters of RPs selected based on the online RSS measurements,
RPs which are physically close to the previous position estimate are also chosen
and the common RPs found in both sets are used in the fine localization stage. The
computed estimate is then post-processed by the Kalman filter. This filter is reset
when the estimate is at the intersection regions, as the user may make turns and
violate the liner motion model used by the Kalman filter. (Chapter 4)
3. Navigation system: A simple navigation system, which uses the map database
to generate path to destination using Dijkstra algorithm and gives guidance, is developed. It also determines whether the user follows the path and gives appropriate
instructions at proper times. (Chapter 5).](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-23-2048.jpg)
![Chapter 1. Introduction
11
4. Software implementation and performance evaluation: A software is developed to implement the proposed positioning and tracking system, as well as a
simple navigation system. It is written in C# and can be installed on any smartphone or PDA that uses Windows Mobile as its operating system. This software
can give real-time position updates and also navigation guidance to the user. The
performance evaluations of the proposed positioning and tracking system are done
for two different experimental sites: Bahen centre and CNIB. Experimental results
show that these systems are able to provide good position estimate of the user
and can be implemented on the PDAs with limited resources, to give real-time
performance. (Chapter 6 and 7 and [23, 24]).
This project is a joint work with Chen Feng, a visiting PhD student from the Beijing Jiaotong University, at the Wireless and Internet Research Laboratory (WirLab),
supervised by Professor Shahrokh Valaee. We work closely together to implement the
indoor tracking and navigation system on the handheld devices. Chen focuses more on
the compressive sensing based positioning system, while I focus more on the tracking and
navigation system, as well as the software implementation.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-24-2048.jpg)
![Chapter 2
Background and Related Works
In this section, a brief overview of RSS-based WLAN positioning and tracking techniques
is given. The two fingerprinting-based methods, namely KNN and Kernel-based are
summarized in Sections 2.2.1 and 2.2.2, as they are implemented in Chapter 7 to compare
the performance of the proposed positioning system. In addition, some works about
pedestrian navigation are summarized.
There are two additional concepts used by this thesis to develop the proposed positioning and tracking system using the fingerprinting approach. Section 2.5 describes the
operation of the affinity propagation algorithm, which generates clusters of similar data
points. Section 2.6 summarizes the compressive sensing theory which can be applied on
the localization problem to estimate the user’s location.
2.1
Indoor RSS-based WLAN Positioning Techniques
The key problem for the indoor RSS-based positioning systems is to identify the RSSposition relationship, so that the user’s location can be estimated based on the RSS
collected at that location. There are two approaches in dealing with this relationship [25]:
the uses of signal propagation models [26, 27] and the location fingerprinting methods
[2, 19, 28].
12](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-25-2048.jpg)
![13
Chapter 2. Background and Related Works
2.1.1
Signal Propagation Modeling
This technique uses the RSS readings collected by the mobile device to estimate the
distances of the device from at least three APs, whose locations are known, based on
a signal radio propagation model. Then triangulation is used to obtain the device’s
position [8].
The accuracy of this technique depends heavily on finding a good model that can
best describe the behavior of the radio propagation channel. However, the indoor radio
propagation channel is highly unpredictable and time-varying, due to severe multipath
in indoor environment; shadowing effect arising from reflection, refraction and scattering
caused by obstacles and walls; and interference with other devices operated at the same
frequency (2.4GHz) as the IEEE 802.11b/g WLAN standard, such as cordless phones,
microwaves and BlueTooth devices. There are two models that are often used for the
indoor radio propagation channel:
• Combined model of path loss and shadowing [29]
This model combines the simplified path-loss model with the effect of shadowing,
which is assumed to be a log-normal random process. The received power pr which
is d meters away from a specific AP is given by:
pr [dBm] = p0 [dBm] + 10 log10 K − 10γ log10
d
− ηdB
d0
(2.1)
where K is a constant depending on the antenna characteristics and channel attenuation, p0 is the signal power at a reference distance d0 for the antenna far field,
γ is the path-loss exponent, which varies for different surrounding environments
2
(2 ≤ γ ≤ 6 for indoor environment) and ηdB ∼ N (0, ση ) is a Gaussian random
variable.
• Wall Attenuation Factor model [19]
This model includes the effects of obstacles or walls between the transmitter and](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-26-2048.jpg)
![Chapter 2. Background and Related Works
receiver. The received power can be obtained by:
nW · W AF nW < C
d
pr [dBm] = p0 [dBm] − 10γ log10
−
d0 C · W AF
nW ≥ C
14
(2.2)
where nW is the number of obstacles or walls between the transmitter and receiver,
C is a threshold up to which no significant attenuation can be observed and W AF
is the wall attenuation factor.
The two empirical models require the calibration of the parameters, such as the path
loss exponent, which vary depending on different environments. This often requires a
comprehensive survey of the RSS distributions over the environment, which is a time
consuming process. In addition, the models assume the RSS is distributed isotropically
from the transmitter. This is often not the case for indoor environments due to the
presence of obstacles. The orientation of the antenna of the mobile device also affects
the RSS [22], but it is not reflected in the two models. Finally, the locations of the APs
may not be known in the real scenario, as these APs may be installed and owned by
different vendors. All of these make the models inadequate to describe the RSS-position
relationship in real situation and lead to errors in estimating the user’s location.
2.1.2
Location Fingerprinting
A location fingerprinting method is often used instead of the radio propagation model,
as it can give better estimates of the user’s locations for indoor environments. This
method is divided into two phases: offline and online phases. During the offline phase,
which is also referred to as the training phase, the RSS readings from different APs are
collected by the WLAN-integrated mobile device at known positions, which are referred
to as the reference points (RPs) to create a fingerprint database, also known as the radio
map. Since the orientation of the device’s antenna affects the RSS readings, a more
comprehensive fingerprint database can be built by collecting RSS readings for different](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-27-2048.jpg)
![Chapter 2. Background and Related Works
15
orientations at the same RP. The actual positioning takes place in the online phase. The
mobile device, which is carried by the user collects RSS readings from different APs at an
unknown position. Then, these RSS online measurements are compared to the fingerprint
database to estimate the user’s location by using different methods described in the next
section.
The accuracy of the estimated position of the user depends highly on the number of
RPs collected in the fingerprint database. If there are more RPs, then the radio map
has a finer resolution and thus allows a better estimation [28]. In addition, since the
RSS varies over time, collecting more time samples of RSS readings at the same RP also
improves the position estimation. Thus, this fingerprint database collection is a time
consuming and labour-intensive process. [30] uses the spatial correlation of adjacent RPs
to generate the database by interpolation from a small number of RPs and this method
is able to reduce the labour effort and time required for the offline phase.
Another disadvantage of this fingerprinting approach is the maintenance of such
databases. Since the RSS propagation environment varies with time, the accuracy of
using the database degenerates over time, as the current RSS readings slowly deviate
from the readings in the database. The database may even be rendered useless, if the
environment changes significantly. This requires the fingerprint database to be rebuilt
periodically, in order to ensure the accuracy of the positioning system. [31] presents a
novel method to update the radio map using the online RSS readings, which can efficiently update the fingerprint database without the labour and time overhead cost as
required by rebuilding such database from scratch.
As shown in [32], the RSS readings collected by different network cards are different,
which can vary up to -25dBm. This indicates that the same fingerprint database cannot
be used by different mobile devices, which are equipped with different WLAN network
cards. That means that the fingerprint collection process must be done on each device
and lead to very high labour and time costs. Another method is to use the signal strength](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-28-2048.jpg)
![Chapter 2. Background and Related Works
16
difference (SSD) between APs instead of the RSS as the fingerprint [33].
Although there are limitations to the location fingerprinting, it is a simple and effective
method to be used by indoor positioning systems. This thesis also uses this approach to
estimate the user’s location.
2.2
Fingerprinting-Based Positioning Methods
There are two approaches to estimate the user’s location based on the online RSS measurements and the fingerprint database [34, 35]. The deterministic approach only uses
the average of the RSS time samples from each RP to estimate the location, whereas the
probabilistic approach incorporates all the RSS time samples for the computation.
For the following section, assume the collected fingerprint database is denoted as a
set {(pi , ψ i (1), . . . , ψ i (T ))|i = 1, . . . , N }, where pi is the Cartesian coordinates for RP
i, ψ i (t) = [ψi,1 (t), . . . , ψi,L (t)]T is the RSS readings vector for RP i at time t with ψi,j (t)
denoted as the RSS reading from AP j for RP i at time t. T is the total number of
collected time samples, N is the total number of RPs and L is the total number of APs.
The online RSS measurement vector can be denoted as r = [r1 , ...rL ]T .
2.2.1
K-Nearest Neighbour Method (KNN)
The K-nearest neighbour (KNN) method is a deterministic approach that uses the average
of the RSS time samples of RPs from the fingerprint database to estimate the user’s
location [19]. It first examines the Euclidean distance of the online RSS measurement
vector to the RPs in the database, namely:
¯
Di = ∥r − ψ i ∥
¯
where ψ i =
1
T
∑T
τ =1
(2.3)
ψi,1 (τ ) is the average RSS vector for RP i. Then, the distances
are sorted in ascending order and the first K RPs that have the smallest distances are](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-29-2048.jpg)
![17
Chapter 2. Background and Related Works
obtained to estimate the location p:
ˆ
K
1 ∑
p
p=
ˆ
K i=1 i
(2.4)
The calculated distances can be used as weights to estimate the location and it is referred
to as the weighted-KNN. The estimated location can be found by
∑K 1
pi
i=1
p = ∑K Di1
ˆ
(2.5)
i=1 Di
2.2.2
Probabilistic Approach
The location estimation problem can be solved by using probabilistic models [2, 36, 37,
37, 38]. The core concept is to find the posterior distribution of the location, which is
the conditional probability p(pi |r) [37]. This conditional probability can be estimated
by using the Maximum A Posteriori (MAP) estimator, which is derived from Bayes rule.
That is:
pM AP = arg max f (pi |r) = arg max
ˆ
pi
pi
f (r|pi )f (pi )
N
∑
(2.6)
f (r|pi )f (pi )
i=1
where f (pi |r) and f (r|pi ) are the conditional probability density functions. Note that
the denominator of (2.6) can be safely ignored as it remains the same regardless of the
choice of pi . In general, there is no prior knowledge of the device’s location and thus
the prior density f (pi ) is assumed to be uniform, which transforms this MAP estimation
into a Maximum Likelihood (ML) estimation:
pM L = arg max f (r|pi )
ˆ
(2.7)
pi
The estimation can be further improved by including the likelihood densities as the weight
for the K RPs with the highest likelihood densities, namely:
pM L+weight =
ˆ
K
∑
wi p i
(2.8)
i=1
f (r|pi )
wi = ∑K
j=1 f (r|pi )
(2.9)](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-30-2048.jpg)
![Chapter 2. Background and Related Works
18
There are several methods to estimate the likelihood density functions f (r|pi ), i =
1, . . . , N from the fingerprint database. Two of the common methods are reviewed here.
Both of them assume that the RSS from different APs are uncorrelated and independent,
∏
so that the density function can be simplified to f (r|pi ) = L f (rk |pi ).
k=1
Histogram
The likelihood density functions can be estimated by the histogram method. This method
requires two parameters to generate a histogram for the RSS time samples collected for
each of the AP at each of the RP [37]. The first parameter is the number of bins,
which are a set of non-overlapping intervals that cover the whole possible range of the
RSS values. The second is the origin of the bins, which is necessary to determine the
boundaries of the bins. Then, the likelihood density estimate for a particular RSS value
can be obtained as the relative frequency of the bin, which contains that particular RSS
value [37].
There are several drawbacks for this method. First, the likelihood density estimate
depends heavily on the choice of the origin and the bin width and thus careful experimental calibration of these parameters is required [37]. Second, a large amount of RSS
samples for each RP is required to generate a reliable histogram that produces good
location estimate.
Kernel-Based
Instead of using the histogram, the kernel-based method uses the kernel density estimator
to estimate the density functions [2,37]. The density function can be estimated as follows:
T
∑
ˆ(r|p ) = 1
f
K(r; ψ i )
i
T t=1
(2.10)
where K(r; ψ i ) denotes the kernel function. A common choice of the kernel function is
the Gaussian kernel. By assuming that the RSS from different APs are uncorrelated and](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-31-2048.jpg)
![Chapter 2. Background and Related Works
19
independent, the Gaussian kernel function is defined as:
)
(
1
∥r − ψ i (t)∥2
K(r; ψ i ) = √
exp −
∗
∗
2(σi )2
( 2πσi )L
(2.11)
∗
where σi is the kernel bandwidth. The determination of this kernel bandwidth is evalu-
ated in [2]. Since this method takes all the RSS time samples collected at each RP into
account for estimating the likelihood densities, the computation time is much larger than
the KNN method.
In this thesis, the kernel-based method is also implemented to compare its performance to the proposed positioning system. The operation of the method using the
Gaussian kernel is summarized in Fig. 2.1 [38].
2.2.3
Region of Interest and Access Points Selections
Before applying the above methods on the whole fingerprint database to estimate the
user’s location, two pre-processing steps can be introduced to confine the localization
problem into a subset of relevant RPs and a subset of APs, which can distinguish the
RPs easily. The region of interest determination step is able to mitigate the effect of the
deviations between the online readings and the radio map due to the time-varying characteristic of the indoor radio channel [39]. In addition, the purpose of AP selection step
is to remove extra APs that may lead to biased estimations and redundant computations,
which is often the case as APs are widely deployed in indoor buildings [38].
Both steps are often carried out together as the reliability of the APs varies for
different RPs [36, 38, 39]. The joint clustering technique proposed in [39] selects the
strongest m APs to generate the probability distribution for each RPs and groups the
RPs, which have the same q strongest APs list, as a cluster during offline phase. The
argument of using strongest APs is that they provide the highest probability of coverage
over time [39]. However, they may not be a good choice, as the variation of the APs may
also lead to error in estimation [28]. [40] presents another AP selection criterion that is](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-32-2048.jpg)
![20
Chapter 2. Background and Related Works
Given:
Radio Map: {(pi , ψ i (1), . . . , ψ i (T ))|i = 1, . . . , N }
Number of APs: L
Number of time samples: T
Inputs:
Online RSS measurement vector: r
Outputs:
Position estimate: p
ˆ
Kernel-based Method:
∗
Optimal bandwidth: σi
( 4 ) 1
−1
∗
σi = L+2 L+4 σi T L+4
ˆ
∑
1
l
where, σi = L L (ˆi )2
ˆ2
l=1 σ
(ˆi )2 =
σl
1
T −1
∑T
t=1 (ψi,l (t)
¯
− ψi,l )2 ,
¯
ψi,l =
1
T
∑T
t=1
ψi,j (t)
Weight calculation:
)
(
∑
2
1
i
wi = T (√2πσ∗ )L T exp − ∥r−ψ∗(t)∥
t=1
2(σ )2
i
i
Estimation:
p=
ˆ
∑N
i=1 wi pi
∑N
i=1 wi
Figure 2.1: Kernel-based method [2].
based on AP’s discrimination power in terms of entropy calculations. Several more AP
selection schemes and the use of spatial filtering for region of interest determination can
be found in [2].
This thesis uses the affinity propagation algorithm to generate cluster of RPs with
similar RSS readings during offline phase. Then, a coarse localization stage is introduced
in online phase to identify in which cluster of RPs should the user be located. In addition,](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-33-2048.jpg)
![Chapter 2. Background and Related Works
21
different AP selection schemes are also explored for the proposed positioning system.
2.3
Indoor Tracking
Most of the indoor tracking methods use past position estimates and pedestrian motion
dynamics to refine the current position estimate determined by the above positioning
methods. In addition, the dynamic motion model can also be used in conjunction with
the current position estimate to predict the future possible locations. The pedestrian
motion dynamics can be modeled by a general Bayesian tracking model and a filter
is then derived to refine the position estimates [41]. There are two filters that are used
commonly to improve the accuracy of positioning systems [41]: Kalman filter and Particle
filter.
2.3.1
Kalman filter
By assuming the Gaussian tracking noise model and linear motion dynamics, the general
filter becomes a Kalman filter, whose optimal solution is a minimum mean square error
(MMSE) estimate. Although the assumption of Gaussian RSS-position relationship is
not often the case [22], the application of the Kalman filter as the post-processing step
is able to improve the accuracy of the positioning systems [41–44]. The parameters of
the Kalman filter are needed to be found experimentally. [45] provides some guidelines
on how to set the parameters for each update steps based on the map information.
2.3.2
Particle filter
The particle filter is a sequential Monte Carlo method that generates random samples,
known as particles, according to a motion models and estimates their probability densities
[46, 47]. Unlike the Kalman filter, the particle filter can be applied on non-Gaussian and
non-linear models. In addition, map information can be used to further improve the](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-34-2048.jpg)
![Chapter 2. Background and Related Works
22
performance of the particle filter by assigning zero weights to the invalid particles, such as
those across the wall [48,49]. Backtracking based on the map information is also proposed
in [50]. Moreover, information obtained from accelerometers and inertial measurement
units (IMU) can also be used to refine the motion models and let the filter to generate
particles that are more relevant and hence improve the tracking accuracy [51, 52].
However, the major drawback of the particle filter is its high computation complexity.
For example, 1600 particles are needed for each filter update for a 40m×40m experimental
area to achieve the best performance [49]. This large computation workload can not be
handled by the mobile devices to give real-time updates to the user. Hence, this thesis
chooses the Kalman filter to post-process the estimates instead of the particle filter, which
may severely hinder the operations of the mobile devices.
2.3.3
Other Methods
Besides the use of the above filters, several other methods are also used for the indoor
tracking. The Horus positioning system [36] smooths out the resulting location estimate
by simply averaging the last W location estimates obtained by the discrete-space estimator. Liao et al. proposed a method to predict the user’s orientation, which is then
used for the next position estimate to improve the accuracy, from the previously computed location estimates [53]. A Viterbi-like algorithm, which is developed to enhance
the RADAR system [20] and is also implemented by [54], makes use of historical data
based on the KNN method to determine the location estimates. Finally, a nonparametric information filter based on the kernel-based probabilistic method is proposed in [55].
This filter, whose computational complexity is lower than particle filter, is able to deal
with tracking scenarios where Kalman filter is inapplicable.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-35-2048.jpg)
![Chapter 2. Background and Related Works
2.4
23
Pedestrian Navigation
Indoor navigation for pedestrian is different from the vehicular navigation using GPS,
which becomes an essential tool to the driver. Gilli`ron and Merminod [56] describes
e
how to implement the personal navigation system for indoor applications. It is crucial to
extract information from the indoor maps as topological models and node/link models,
so that they can be used for implementation of route guidance. They also implement
map matching algorithms, so that the system can self-correct the user’s locations due
to bad estimates based on the topological elements from the map databases, traveled
distances and direction changes. [48] also describes how the map information can be used
for indoor location-aware systems. There are different ways to present the guidance information graphically to the users based on different output devices and they are explored
in [57]. The experience of using the indoor navigation systems can be enhanced in a
smart environment, which is equipped with different kinds of sensors that can convey
additional information to users [58].
There are more restrictions for the navigation systems when they are targeted to visually impaired users. [59] describes the path planning and following algorithms specifically
designed for visually impaired. In summary, such systems generate obstacle-free paths;
provide more detailed information about the surrounding area and give the guidance in
relation to special objects, such as walls, doors and rails, etc. In addition to the commonly used Dijkstra algorithm to generate the routes [56], a cactus tree-based algorithm
is also used to generate a high-level guidance. A more detailed development of an indoor
routing algorithm for the blind and its comparison to the one for the sighted can be found
in [60].
This thesis develops a simple navigation system, which uses the proposed tracking
system to provide updates of user’s locations. Such system is implemented as a software on PDAs and smartphones and is given to the visually impaired people to test its
usefulness in helping them to get familiar with the indoor environment.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-36-2048.jpg)
![Chapter 2. Background and Related Works
2.5
24
Affinity Propagation Algorithm For Clustering
In this thesis, the affinity propagation algorithm described in [15] is used to cluster the
RPs with similar RSS readings, so that the proposed positioning and tracking system is
able to confine the localization problem into a smaller region.
Unlike the traditional K-means clustering method, which may lead to bad clustering
results due to bad choice of randomly selected K initial exemplars [61], the affinity
propagation algorithm is able to generate good clustering results without predetermining
the initial exemplars. This algorithm allows all the data points to have equal chance
to become exemplars and is easy to be implemented, thus it is chosen in this thesis to
cluster the RPs.
The affinity propagation algorithm generates a set of exemplars and corresponding
clusters by recursively transmitting real-valued messages between data points with an
input measure of similarity between pairs of data points [15]. The pairwise similarity
s(i, j) indicates the suitability of data point j to be the exemplar of data point i. Another input measure is the preference, which is also the self similarity for data point k,
p(k) = s(k, k). This value defines the a priori possibility that data point k to become an
exemplar. If all the data points are equally possible to be exemplars, then their preferences can be set to a common value. High preference values will lead to large number
of clusters generated by the algorithm. In practice, the preference values are commonly
assigned as the minimum or median similarity to generate moderate number of clusters.
The core operations of the algorithm is the transmission of two kinds of real-valued
messages: responsibility message, r(i, j) and availability message, a(i, j). The responsibility message, r(i, j), is sent from data point i to candidate exemplar j to reflect the
suitability of data point j to serve as the exemplar for data point i taking into considerations the other potential exemplars. It is updated according to
r(i, j) = s(i, j) − ′ max {a(i, j ′ ) + s(i, j ′ )}
′
j s.t.j ̸=j
(2.12)](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-37-2048.jpg)
![25
Chapter 2. Background and Related Works
The availability message, a(i, j) is sent from candidate exemplar j to data point i
to reflect how appropriate that data point i should choose data point j as its exemplar,
taking into account the responsibility messages from other data points that data point j
should be an exemplar. Its update rule is:
a(i, j) = min 0, r(j, j) +
∑
max{0, r(i′ , j)}
i′ s.t.i′ ̸={i,j}
(2.13)
Two additional messages: self-responsibility, r(i, i) and self-availability, a(i, i) are also
calculated for each data point i. These messages reflect accumulated evidence that i is
an exemplar. The formulas to update these two messages are stated below:
r(i, i) = p(i) − ′ max {a(i, j ′ ) + s(i, j ′ )}
′
a(j, j) =
∑
j s.t.j ̸=j
max{0, r(i′ , j)}
(2.14)
(2.15)
i′ s.t.i′ ̸=j
The exemplars can then be identified by combining the two messages. For data point
i, find
j ′ = arg max{a(i, j) + r(i, j)}
(2.16)
j
If j ′ = i, then data point i is an exemplar; otherwise, data point j ′ is the exemplar
for data point i. The messages are passed recursively between pairs of data points by
following the above updating rules (2.12) to (2.15) until a good set of exemplars and
corresponding clusters gradually emerges.
2.6
Compressive Sensing Theory
This thesis describes how the localization problem can be re-formulated into a sparse
signal recovery problem, so that the compressive sensing theory discussed in [16, 62, 63]
can be applied to estimate the user’s location.
Compressive sensing theory allows compressible signals to be recovered by fewer samples than traditional methods, which according to the Nyquist sampling theory requires](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-38-2048.jpg)
![Chapter 2. Background and Related Works
26
the sampling rate to be at least twice the maximum bandwidth. This is possible when
signals of interest are sparse and are sampled incoherently. The compressive sensing
problem can be formulated as follow [16, 63]:
Consider a discrete-time signal x as a N × 1 vector in RN . Such signal can be
represented as a linear combination of a set of basis {ψ i }N . Constructing a N × N basis
i=1
matrix Ψ = [ψ 1 , ψ 2 , ...ψ N ], the signal x can be expressed as
x=
N
∑
si ψi = Ψs
(2.17)
i=1
where s is a N × 1 vector and is an equivalent representation of x in the different basis
Ψ. A signal is K-sparse when it can be represented as a linear combination of K ≪ N
basis vectors. This means that there is only K nonzero entries for vector s.
The overall compressive sensing problem can be expressed as
y = Φx = ΦΨs = Θs
(2.18)
where Φ is a M × N , M < N measurement sensing matrix for sensing the signal x,
Θ = ΦΨ is an M × N matrix, and y is a M × 1 observation vector collected as a
result of this sensing process. This problem can be referred to as incoherent sampling
if the largest correlation between the sensing matrix Φ and the representation basis Ψ,
√
µ(Φ, Ψ) = N · max | < ϕi , ψ j > | is small.
1≤i,j≤N
Compressive sensing theory requires both the sparsity and incoherent sampling, so
that the signal can be recovered exactly with high probability. If M ≥ cKlog(N/K) ≪ N ,
where c is a small constant, the signal can be reconstructed by solving the following l1
norm minimization problem:
s = arg min ∥s∥1 such that Θs = y
ˆ
(2.19)
s∈RN
This is a convex optimization problem that can be easily converted into a linear program,
known as basis pursuit, through primal-dual method [62, 64]. Additional algorithms](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-39-2048.jpg)
![Chapter 2. Background and Related Works
27
to solve this optimization problem can also be found in [64]. In this thesis, the ℓ1 minimization problem is solved by using the basis pursuit linear program provided in the
matlab toolbox, ℓ1 -MAGIC, developed by Cand`s [65].
e
2.7
Chapter Summary
This chapter gives a brief overview of different methods developed for the RSS-based
WLAN indoor positioning systems. It also discusses how the reduction of the region of
interest and selection of access points can enhance the accuracy of these systems. Two
fingerprinting methods, KNN and kernel-based probabilistic techniques are described in
details, as they are served as the performance benchmarks for the proposed positioning system. Moreover, several indoor tracking techniques that are able to improve the
accuracy through the use of previous estimates and pedestrian motion models are also
discussed. The developments of indoor navigation systems are also included to provide
some insight on how the location information produced by the positioning and tracking
systems can be used.
Finally, the affinity propagation algorithm for clustering data points and the compressive sensing theory for sparse and incoherent sampled signals are discussed, these
concepts are used by the proposed positioning and tracking systems.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-40-2048.jpg)

![Chapter 3. Compressive Sensing Based Positioning System
31
interest and N is the total number of RPs. The columns of Ψ(o) represent the average
RSS readings at each RP, which can be referred to as the radio map vector and is denoted
as
(o)
(o)
ψ j = [ψ1,j
(o)
ψ2,j
···
(o)
ψL,j ]T ,
j = 1, 2, . . . , N
(3.2)
Besides the average RSS reading matrix Ψ(o) , the database server also stores the
variance of these time samples, which are useful in determining which APs should be
selected for localization. The variance vector for each RP is defined as
(o)
(o)
∆j = [∆1,j
(o)
where ∆i,j =
1
q−1
∑q
(o)
τ =1 (ψi,j (τ )
(o)
∆2,j
···
(o)
∆L,j ]T ,
j = 1, 2, . . . , N
(3.3)
(o)
− ψi,j )2 is the unbiased variance of RSS readings from
AP i at RP j for orientation o.
For each RP j, its position represented as Cartesian coordinates (xj , yj ), together with
its average and variance of the RSS readings from different APs at different orientations
(o)
(o)
form a set of (xj , yj ; ψ j ; ∆j ), o ∈ O, which is stored in the fingerprint database. The
database is then preprocessed as described in the next subsection before being used for
the computation of position estimation during online phase. Note that if there is no RSS
readings collected from an AP at a RP and an orientation, the corresponding value in
the fingerprint database is set to a small value to imply its invalidity.
3.2.2
Clusters Generation by Affinity Propagation
Due to the time varying characteristics of the indoor propagation channel, RSS readings
collected during online phase may deviate from those stored in the radio map database.
As a result, these deviation may lead to error estimation of position. In addition, the
computation time for finding position updates increases proportionally to the number of
RPs. Therefore, a coarse localization stage is introduced at the online phase to confine
the localization problem into a smaller region, namely a subset of RPs that have similar
RSS readings to the online measurement, before the fine localization is performed. This](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-44-2048.jpg)
![Chapter 3. Compressive Sensing Based Positioning System
32
stage can effectively reduce the computation time due to the reduction of number of
relevant RPs, as well as the errors introduced by the potential outliers.
The RPs collected in the offline phase are required to be divided into subsets, so that
a coarse localization stage can take place during the online phase. The RPs whose RSS
readings are similar and physically close to each other should belong to the same group.
This group division process, which is referred to as the clustering process in the proposed
system is done during the offline phase after the fingerprints collection is finished. Since
the RSS readings for the same RP vary for the four orientations, the clustering process
is performed on each of the four radio map databases separately.
The affinity propagation algorithm described in Section 2.5 is used to generate the
desirable clusters, as this algorithm allows all the RPs to have equal chances to be
exemplars and is easily to be implemented. It requires two input parameters, namely the
similarity between pairs of RPs and the preference values. At orientation o, the similarity
between RP i and RP j is defined as
(o)
(o)
s(i, j)(o) = −∥ψ i − ψ j ∥2 , ∀i, j ̸= i ∈ {1, 2, ..., N }, o ∈ O
(3.4)
Since all of the RPs are equally desirable to be exemplars, their preferences are set
to a common value. In order to generate a moderate number of clusters, the common
preference for orientation o is defined as
p(o) = γ (o) · median{s(i, j)(o) , ∀i, j ̸= i ∈ {1, 2, ..., N }}, o ∈ O
(3.5)
where γ (o) is a real number which is experimentally determined, such that a desired
number of clusters is generated.
For each orientation, o ∈ O, the affinity propagation algorithm takes the above definitions of similarity (3.4) and preference (3.5) as inputs and then it recursively updates
the responsibility messages and availability messages according to (2.12) to (2.15) until
a good set of exemplars and the corresponding clusters emerges [15]. This set of generated exemplars is denoted as H(o) and the corresponding cluster member set with RP](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-45-2048.jpg)

![Chapter 3. Compressive Sensing Based Positioning System
Mobile Device
34
Server
Collect RSS time samples from APs
at RP j for 4 orientations
Compute the average and variance of
RSS readings over time, _j (o), _ j(o)
∆
ψ
Send RP j’ s information:
_j (o), _j (o) & coordinates (x_j, y_j)
SEND
Collect fingerprint for RP j
in 4 orientations
∆
Use the device to
collect N RPs
ψ
Create overall radio map matrix:
(o)
= [ _ 1(o), _ 2(o),…, _N (o)]
ψ
ψ
ψ
Ψ
Apply affinity propagation on each
radio map to generate sets of
exemplars H(o) and their
corresponding members C_j (o)
Outlier adjustment
for each radio map
Figure 3.2: Interaction between the database server and the mobile device during offline
phase.
measurement vector at time t is denoted as
r(t) = [r1 (t), r2 (t), · · · , rL (t)]T
(3.6)
where {rk (t), k = 1, ..., L} is the online RSS readings from AP k at time t. Since the
positioning system does not take into account the previous estimate, the time dependency
notation (t) is dropped in this chapter for simplicity purpose, i.e. the online RSS reading
is denoted as r instead of r(t).
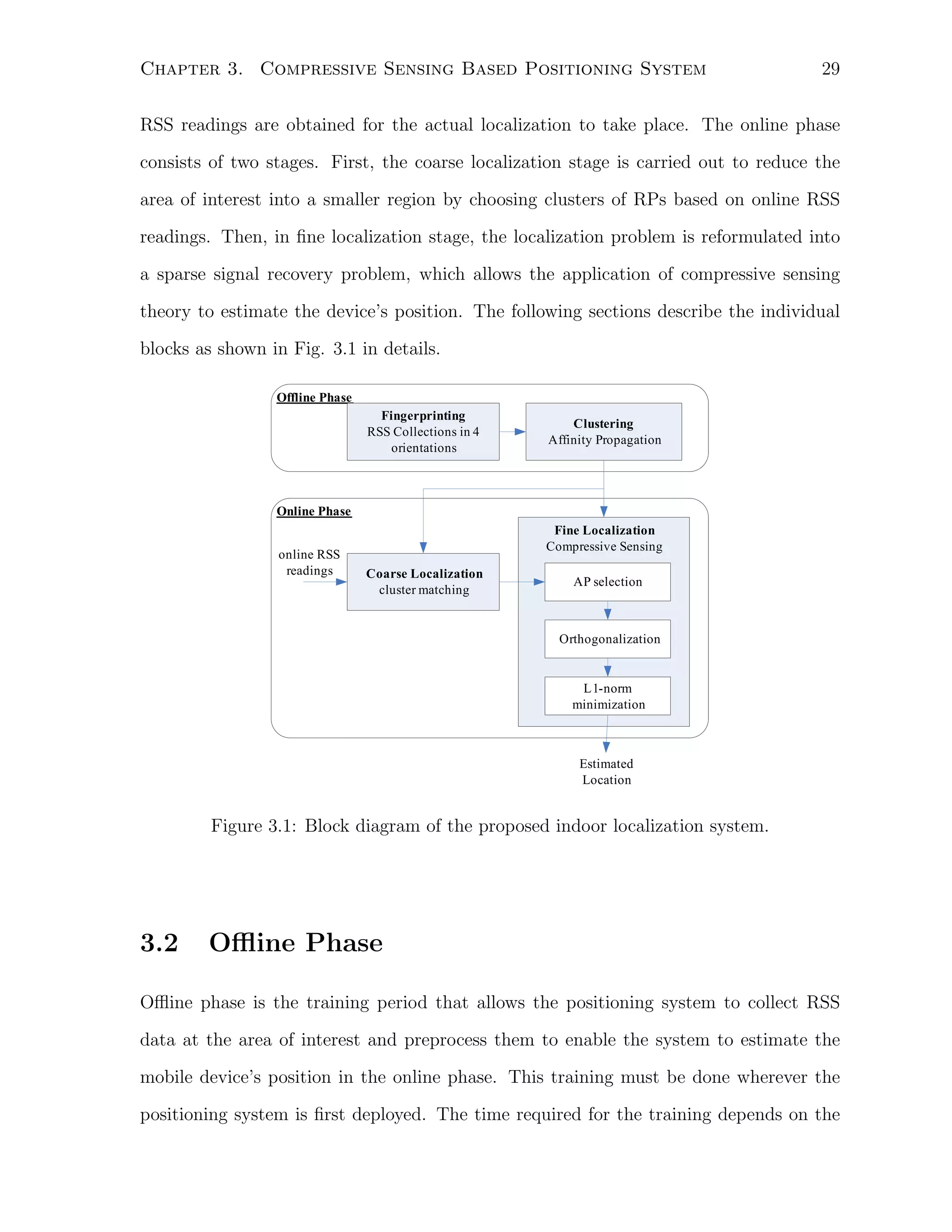
As shown in Fig. 3.1, the collected measurement vector is the input to the proposed
positioning system. First, it is used in the coarse localization stage to reduce the area of
interest. Then it is also used in the fine localization stage to obtain the final estimated
position. The details of these two stages are described in the following sections.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-47-2048.jpg)

![38
Chapter 3. Compressive Sensing Based Positioning System
be a high percentage, α1 , of the maximum similarity difference, that is
α = α1 ·
max
j∈H(o) ,o∈O
{
}
SM atch (r, j)(o) + (1 − α1 ) ·
min
j∈H(o) ,o∈O
{
SM atch (r, j)(o)
}
(3.15)
Finally, the region of interest of the localization problem can be reduced to the set of
˜ ˜ ˜
CRSS . The modified radio map matrix ΨL×N , N = |CRSS | can be obtained as
(o)
˜
Ψ = [ψ j , ∀(k, o) ∈ CRSS ].
(3.16)
This matrix will then be used by the following fine localization stage. Note it is
possible that this matrix may contain the radio map vectors from the same RP but at
different orientations, as all clusters from different orientations are considered for cluster
matching.
3.3.2
Fine Localization Stage: Compressive Sensing Recovery
The fingerprint-based localization problem can be reformulated as a sparse signal recovery
problem, as the position of the mobile user is unique in the discrete spatial domain. By
assuming that the mobile user is located exactly at RP j and facing at orientation o, such
that (j, o) ∈ CRSS , the user’s location can be represented relative to these RPs instead
of the actual location. The mathematical representation is a 1-sparse vector, denoted as
θ N ×1 , whose elements are all equal to zero except the n-th element, so that θ(n) = 1,
˜
where n is the corresponding index of the RP at which the mobile user is located, that is
θ = [0, ..., 0,
1
, 0, ..., 0]T
(3.17)
nth element
Then, the online RSS measurement r obtained by the mobile device can be expressed
as:
˜
y = Φr = ΦΨθ + ε
(3.18)
˜
where Ψ is the modified radio map matrix as defined in (3.16) and ϵ is an unknown
measurement noise. The matrix ΦM ×L is an AP selection operator applied on the online](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-51-2048.jpg)
![39
Chapter 3. Compressive Sensing Based Positioning System
RSS measurement vector r to obtain vector y, where M < L is the desired number of
APs to be selected.
Based on this sparse signal recovery formulation, the following parts explain how the
location of the mobile user can be recovered by using the compressive sensing theory.
A. Access Points Selection
Since most modern buildings are equipped with a large number of APs to ensure good
quality of wireless services, the total number of detectable APs in these buildings, L is
often much greater than that required for positioning. These extra APs lead to excessive
computations and possibly biased estimations if some of the APs are not reliable. Inclusion of RSS readings from unstable APs may introduce error to the estimations, as online
RSS values may deviate from the readings in the offline database. Therefore, an access
point selection step is introduced to select a subset of reliable and stable APs from the
available ones to be used for the actual positioning, in order to eliminate the errors due
to large number of APs. Denote the set of all available APs found within all the RPs by
L with |L| = L. Then the AP selection step is to determine a subset of APs, M ⊆ L,
such that |M| = M ≤ L.
The AP selection process is carried out by applying the AP selection operator Φ on
the online measurement vector r as defined in (3.18). Each row of Φ, is a 1 × L vector
th
that selects the desired lm AP, where lm ∈ M, by assigning ϕ(lm ) = 1 and zero to the
rest of the elements, namely:
ϕm = [0, ..., 0,
1
, 0, ..., 0],
lm ∈ M, ∀m = 1, 2, . . . , M
(3.19)
lm −th element
In this thesis, three AP selection schemes are used based on APs stabilities and
differentiability in spatial domain. Their performances are evaluated in a later chapter.
1. Strongest APs [39]](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-52-2048.jpg)
![Chapter 3. Compressive Sensing Based Positioning System
40
This scheme selects the set of M APs with the strongest RSS readings from the
online RSS measurement vector. These APs with strong RSS readings are more
reliable than the ones with weak RSS readings, as they provide a high probability
of coverage over time. The set of APs can be obtained by sorting the elements
of the online measurement vector r in descending order and selecting indices of
the first M values that correspond to the APs with highest RSS readings. Since
the online RSS readings are different for each run, the AP selection operator Φ is
created dynamically on the device for each update during the online phase.
2. Fisher Criterion [38, 66]
This scheme selects the APs which discriminate themselves the best within RPs.
The discrimination ability for each AP i, i ∈ {1, 2, . . . , L} can be quantified through
the Fisher criterion. The metric for AP i, denoted as ξi is defined as
∑
ξi =
(o)
(j,o)∈CRSS (ψi,j
∑
(j,o)∈CRSS
¯
where ψi =
1
˜
N
∑
(j,o)∈CRSS
¯
− ψi )2
(o)
(3.20)
∆i,j
(o)
ψi,j . The APs with highest ξi are chosen to construct
the AP selection operator Φ for the actual localization. This metric accounts
for two factors: the denominator ensures that RSS values should not vary too
much over time, thus implies that the offline and online values are similar and
the numerator evaluates the discrimination ability of each AP by considering the
strength of variations of mean RSS across RPs. Since this metric calculations are
done across the RPs j at orientation o chosen in the coarse localization stage,
(j, o) ∈ CRSS , the AP selection operator Φ is created dynamically on the device for
each update during the online phase.
3. Random Combination
Unlike the above two schemes, which select the appropriate APs based on different
criteria and create the AP selection operator Φ dynamically for each update, the](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-53-2048.jpg)
![Chapter 3. Compressive Sensing Based Positioning System
41
random combination scheme does not take into account the performance of the
APs and thus have less computation complexity during online phase and also does
not require large number of RSS time samples for the variance calculation in the
offline phase as required by the Fisher criterion. The AP selection operator Φ is
defined as a randomly generated i.i.d. Gaussian M × L matrix. Thus, according to
(3.18), y = Φr, y is a set of M linear combinations of online RSS values from L
APs. Since the same matrix can be reused for each update, it can be generated and
stored first during the training period and retrieved for use directly in the online
phase, saving the time to dynamically generate the matrix as required by the other
two schemes.
B. Orthogonalization and Signal Recovery using ℓ1 -minimization
Compressive sensing theory requires both sparsity and incoherence of the signal, so that
it can be recovered accurately. Although the localization problem as defined in (3.18)
˜
satisfies the sparsity requirement, Φ and Ψ are in general coherent in the spatial domain.
Thus, an orthogonalization procedure is applied to induce the incoherence property as
required by the CS theory [67, 68].
The orthogonalization process is done by applying an orthogonalization operator, T,
on the vector y, such that z = Ty. The operator is defined as
T = QR†
(3.21)
˜
where R = ΦΨ, and Q = orth(RT )T , where R† is a pseudo-inverse of matrix R and
orth(R) is an orthogonal basis for the range of R. By applying this operator on y, (3.18)
becomes:
z = Ty = QR† y
= QR† Rθ + QR† ε
= Qθ + ε′
(3.22)](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-54-2048.jpg)
![Chapter 3. Compressive Sensing Based Positioning System
42
˜
where ε′ = Tε. If M is in the order of log N , the minimum bound required by the
CS theory, θ can be well-recovered from z with very high probability, by solving the
following ℓ1 -minimization problem [67, 68].
ˆ
θ = arg min ∥θ∥1 ,
s.t. z = Qθ + ε′ .
(3.23)
˜
θ∈RN
The computation complexity of the ℓ1 -minimization algorithm grows proportional to
the dimension of vector θ, which is the number of potential RPs. Therefore, the coarse
localization stage, which reduces the area of interest from all the N RPs into a subset
˜
of N < N RPs, reduces the computational time and resources required for solving the
ℓ1 -minimization problem, and thus allows this procedure to be carried out by resourcelimited mobile devices.
C. Interpretation of Actual Position
The above procedure is able to recover the exact position, if the mobile user is located at
one of the RPs facing one of the orientations in the set of O, which is the assumption made
earlier in order to formulate the localization problem into a 1-sparse natured problem.
However, in real situation, the mobile user may not be located at an RP facing a certain
ˆ
orientation. Thus, in actual implementation, the recovered position vector θ is not a
1-sparse vector, rather a vector with a few non-zero coefficients. A post-processing step
ˆ
is conducted to interpret this recovered location vector θ into an actual location and
compensate the error induced by the grid assumption. The procedure chooses the set of
ˆ
all indices of the dominant elements in θ, which are above a certain threshold λ, denoted
as R
ˆ
R = {n|θ(n) > λ}
(3.24)
ˆ
λ = λ1 max(θ)
(3.25)
where λ1 is a parameter within a range (0, 1) and is adjusted experimentally. Then, the
estimated location of the mobile user can be calculated as a weighted average of these](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-55-2048.jpg)

![Chapter 4
Indoor Tracking System
The previous chapter describes a positioning system that can accurately estimate a stationary user’s position. This positioning system is modified in this chapter in order to
track the dynamic mobile user. The proposed indoor tracking system uses the Kalman
filter with map information to smooth out the location estimate and also uses previous
position estimate to choose the relevant region of interest in the coarse localization stage.
This chapter first describes the Kalman filter and then the proposed indoor tracking
system.
In this chapter, the tracking problem is defined as follows. The device carried by
the mobile user periodically collects the online RSS readings from each APs at a time
interval ∆t, which is limited by the device’s network card and hardware performances.
The online RSS readings vector is denoted as r(t) = [r1 (t), r2 (t), . . . , rL (t)], t = 0, 1, 2, ...,
where rl (t) corresponds to the RSS from AP l at time t. Then, the indoor tracking system
uses these RSS readings to estimate the user’s location at time t, which is denoted as
p(t) = [ˆ(t), y (t)]T .
ˆ
x
ˆ
46](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-59-2048.jpg)
![Chapter 4. Indoor Tracking System
4.1
47
General Bayesian Tracking Model
The tracking problem of a mobile user can be modeled by a general Bayesian tracking
model as follows [41] and [47]:
x(t) = ft (x(t − 1), w(t))
(4.1)
z(t) = ht (x(t), v(t))
(4.2)
where x(t) = [x(t), y(t), vx (t), vy (t)] is the state of the user at time t with (x(t), y(t))
as the Cartesian coordinates of the user’s location and vx (t) and vy (t) as the velocities
in x and y directions, respectively. Assuming the tracking is a Markov process of order
one, the state evolves as a function ft of previous state and w(t), i.i.d. process noise
vector only. In addition, the measurement z(t) depends on the current state and the
i.i.d. measurement noise vector v(t) through the function ht .
The current location of the mobile user, x(t) can then be estimated recursively from
the set of measurements up to time t, i.e. z(1 : t) = {z(i), i = 1, ..., t}, in terms of the
probability distributive function (pdf), denoted as p(x(t)|z(1 : t)). Assuming that the
initial pdf p(x0 |z 0 ) ≡ p(z 0 ) and p(x(t−1)|z(1 : t−1)) are known, the pdf p(x(t)|z(1 : t))
can be obtained by the following prediction and update stages:
1. Prediction Stage:
The prior pdf p(x(t)|z(1 : t−1)) can be predicted based on p((x(t)|x(t−1)), which
is defined by the state process equation (4.1) and the previous state pdf.
∫
p(x(t)|z(1 : t − 1)) =
p((x(t)|x(t − 1))p(x(t − 1)|z(1 : t − 1))dx(t − 1) (4.3)
2. Update Stage:
Then, the prior pdf can be updated by the measurement z(t) obtained at time t](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-60-2048.jpg)
![48
Chapter 4. Indoor Tracking System
using the Bayes’ rule,
p(z(t)|x(t))p(x(t)|z(1 : t − 1))
p(z(t)|z(1 : t − 1))
∫
p(z(t)|z(1 : t − 1)) = p(x(t)|z(1 : t − 1))dx(t)
p(x(t)|z(1 : t)) =
(4.4)
(4.5)
where p(z(t)|x(t)) is defined by the measurement model (4.2).
4.2
Kalman Filter
If the process and measurement noises are assumed to be Gaussian and the motion
dynamic model is linear, i.e. the process and measurement functions ft and ht are linear
in equations (4.1) and (4.2), then the general Bayesian tracking model is reduced to
a Kalman filter. The optimal solution can be obtained for this Kalman filter as the
minimum mean square estimates (MMSE). The process and measurement equations of
the Kalman tracking model can be formulated as
x(t) = Fx(t − 1) + w(t)
(4.6)
z(t) = Hx(t) + v(t)
(4.7)
where x(t) = [x(t), y(t), vx (t), vy (t)]T is the state vector and z(t) is the measurement
vector. The process noise w(t) ∼ N (0, S) and the measurement noise v(t) ∼ N (0, U)
are assumed to be independent with the corresponding covariance matrices S and U.
The matrices F and H in (4.6) define the linear motion model. For the tracking
problem, they are assigned as follows:
1 0 ∆t 0
0 1 0 ∆t
F=
0
0 0 1
0 0 0
1
1 0 0 0
H=
0 1 0 0
(4.8)
That means the current location of the mobile user is assumed to be the previous location
of the user plus distance traveled, which is computed as the time interval ∆t times the](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-61-2048.jpg)
![Chapter 4. Indoor Tracking System
52
Group II: RPs within physical proximity
Besides the use of the online RSS readings to choose the relevant RPs, they can be
chosen by finding the possible range of the device’s current location based on the previous
estimated location, p(t − 1) = (ˆ(t − 1), y (t − 1)). Since a person cannot walk far away
ˆ
x
ˆ
within a short period of time, it is reasonable that the system can limit the region of
interest into the possible walking range based on the previous estimated position, if it is
known and reliable. There are two schemes to choose this possible walking range and are
discussed as follows.
1. Unpredicted - Based only on previous estimation
This scheme selects a set of RPs that are within walking distance during the specified update time interval to the previous estimated location, that is
√
ˆ
ˆ
CDist = {j| (xj − x(t − 1))2 + (yj − y (t − 1))2 < β, j ∈ {1, . . . , N }}
(4.15)
where (xj , yj ) is the location of RP j and β is the walking distance within the
specified update time interval ∆t.
2. Predicted - Based on previous estimation and prediction using linear motion model
This scheme uses the previous estimated location to predict the current possible
location based on a linear motion model and then chooses the RPs which are within
the walking range of this predicted position. The same linear model used by the
Kalman filter defined in (4.8) and (4.6) without the addition of Gaussian noise can
¯
be used to predict the user’s current locations, denoted as p(t):
p(t) = HF¯(t − 1)
¯
x
(4.16)
where x(t − 1) = [ˆ(t − 1), y (t − 1), vx (t − 1), vy (t − 1)]T is the state vector with
¯
x
ˆ
ˆ
(ˆ(t − 1), y (t − 1)) = p(t − 1) as the previous user’s estimated position computed by
x
ˆ
the tracking system. The velocities in x and y directions, represented as vx (t − 1)](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-65-2048.jpg)
![53
Chapter 4. Indoor Tracking System
and vy (t − 1), respectively, can be defined in several ways. First, if both of them
are set to zeros, then the predicted location is the same as the previous estimate,
ˆ
p(t) = p(t − 1). This is equivalent to the previous described scheme. Second, if
¯
the user is known to be walking at a constant speed, these values can be assigned
accordingly. However, for real applications, a user may walk to a random direction
at a random speed. Thus, it is necessary to find a way to predict the user’s velocity
at each time interval, in order to have a good estimation for the current location.
The estimation of these velocities can be obtained from the output of the Kalman
filter, which is implemented after the fine localization stage and will be described
in Section 4.3.2. Then, the state vector for (4.16) can be assigned directly as the
final estimate of the state vector for the Kalman filter, i.e. x(t − 1) = x(t − 1).
¯
ˆ
The system then selects a set of RPs which are in close proximity to this predicted
current location p(t) = [¯1 (t), p2 (t)]T , that is:
¯
p
¯
CDist
√
¯
¯
= {j| (xj − p1 (t))2 + (yj − p2 (t))2 < β, j ∈ 1, . . . , N }
(4.17)
After the selection of these two groups of relevant RPs based on RSS readings similarities and physical proximities, the system then includes the common RPs that appear
in both groups as the set of reduced region, where the final localization stage is applied.
The common RPs is obtained as a set C,
C = CRSS
∪
{(j, o)|j ∈ CDist and o ∈ O}
(4.18)
This set contains RPs that satisfy both conditions of similar RSS readings to the
online RSS measurement and within close range to the user’s previous location. Thus,
they are very likely to be the possible locations that the current user is located. By
introducing the constraint of physical range, the system is able to identify the instants
when the online RSS readings collected is not useful to find the user’s position. In normal
operation, the user must be within a range around his previous location. If the selected](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-66-2048.jpg)
![54
Chapter 4. Indoor Tracking System
clusters of RPs in CRSS are far away from the previous location, then the online RSS
readings can be regarded as invalid, as there are large deviations between the online
readings and offline database, so that the cluster matching based on similarities of RSS
readings fails to find the correct clusters of RPs. This scenario leads to an empty set of C
and halts the fine localization stage. If such thing occurs, the system discards this online
RSS measurement vector and obtains a new one to restart the localization process.
There may be a possibility that all the consecutive online RSS measurement vectors
lead to empty sets of C. This makes the system continuously collect a new online RSS
measurement, which is then discarded, preventing it from computing the true estimate of
the user’s location. This happens as the previous position estimate is not accurate and
hence the selection of RPs based on such estimate does not match with the RPs selected
based on the online RSS measurement vector. Thus, the system is reset to use only the
online RSS measurement vector to select the RPs, when Nempty consecutive online RSS
measurement vectors are discarded, arguing that the previous position estimate is no
longer valid to reduce the localization problem into a smaller relevant region.
After a successful computation of finding the non-empty set of C, the modified radio
˜ ˜ ˜
map matrix ΨL×N , N = |C| can be obtained as
(o)
˜
Ψ = [ψ j , ∀(j, o) ∈ C].
(4.19)
This matrix will then be used by the fine localization stage. The fine localization
stage for the tracking system remains the same as the one in the CS-based positioning
system, which is already described in Section 3.3.2. Since the estimated user’s position
computed by the fine localization stage is then fed into the Kalman filter to obtain the
˜
final estimate in the tracking system, such temporal solution is referred to as p(t) in this
chapter, which indicates that it is not the final solution.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-67-2048.jpg)
![56
Chapter 4. Indoor Tracking System
conditions for this new Kalman filter. Namely,
x(tturn ) = [p(tturn ), 0, 0]T
ˆ
ˆ
(4.21)
P(tturn ) = P(0)
Then, the Kalman filter is updated as normal according to (4.9) to (4.13) for the next
estimate at time (tturn + 1) using z(tturn + 1) = p(tturn + 1). This removes the inaccurate
˜
estimation by the Kalman filter when the user is making a turn. Fig. 4.3 summarizes
how the Kalman filter is applied on the proposed tracking system.
4.4
Chapter Summary
This chapter modifies the CS-based positioning system described in the previous chapter
into a tracking system, which is able to improve the accuracy in estimating the mobile
user’s locations. By using the user’s previous estimated locations, the tracking system
is able to refine the current estimate in two ways: 1) to select appropriate RPs in the
coarse localization stage and 2) to apply Kalman filter for better location estimate.
First, during the coarse localization stage, a set of RPs that are within walking range
to the i) previous estimated location p(t − 1) or ii) the predicted current location p(t)
ˆ
¯
based on the previous estimated location, are selected as the potential region of interest,
arguing that a user cannot be physically far away within a short period of time in the
indoor environment. The RPs appeared in both set of CDist , found based on previous
estimated location and the set of CRSS , determined by the original cluster matching
scheme for the CS-based positioning system, are then used to generate a modified radio
˜
map matrix Ψ that is required for the fine localization stage. This modified coarse
localization stage ensures that the reduced region of interest are within the walking
range of the user and provides a way to reject the invalid online RSS readings when no
common RPs are found in both sets.
The tracking system also introduces the Kalman filter stage, which uses the temporal](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-69-2048.jpg)
![Chapter 4. Indoor Tracking System
Given:
i
i
Intersections Set: Rintersection = {(xi , ymin ), (xi , ymax )| i = 1, ..., B}
min
max
Inputs:
Computed estimate from fine localization stage: p(t)
˜
Final estimate of previous update: p(t − 1) = (ˆ(t − 1), y (t − 1))
ˆ
x
ˆ
Outputs:
Final estimate of current update: p(t) = (ˆ(t), y (t))
ˆ
x
ˆ
Kalman Filter:
Initial conditions
x(0) = [p(0), 0, 0]T , P(0)
ˆ
ˆ
Check if user is already at intersection
for i = 1, . . . B
i
i
if (xi ≤ x(t − 1) ≤ xi
ˆ
ˆ
min
max and ymin ≤ y (t − 1) ≤ ymax ) then
At intersection, reset Kalman filter
x(t − 1) = [p(t − 1), 0, 0]T
ˆ
ˆ
P(t − 1) = P(0)
break for loop
endif
endif
Update
set z(t) = p(t) to update the Kalman filter through (4.9) to (4.13)
˜
compute for p(t) according to (4.14)
ˆ
Figure 4.3: Map-Adoptive Kalman Filter
57](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-70-2048.jpg)


![Chapter 5. Simple Navigation System
5.2.1
61
Layout Definition
The layout of the map is interpreted as a connected graph, so that the path routing
problem can be transformed into a graph problem [56], which is solved by the path
routing module described in the later section. The nodes of this graph are a set of
Cartesian coordinates of the possible passage points along the corridors or destinations.
Two nodes are connected together with an edge, if both nodes can reach each other
physically without obstacles in their ways. A non-negative weight is assigned to each
edge and is defined as the Euclidean distance between the connected nodes. In order to
ensure that at least one feasible path can be generated for all the destinations defined on
the map, the graph must be connected meaning that there must be a path, which is a
set of edges that connect any pairs of nodes defined in this graph. This connected graph
can be represented as G = (E, V ), where E is a set of edges and V is a set of nodes. The
weight of the edges can be represented as a matrix DG = [dGij ]|V |×|V | , where dGij th entry
corresponds to the Euclidean distance between node i and node j if they are connected
by an edge, otherwise the value is set to infinity which implies the two nodes are not
connected to each other.
5.2.2
Map Features Definition
In order to provide more information about the surrounding environment, which will be
useful to help user to get familiar with the area, a list of map features can be extracted
from the map to generate a more comprehensive map database for the navigation system. This list of the map features can include general facilities and accesses and can be
expanded as needed depending on user’s preferences. Washrooms, elevators and stairs
are some examples of map features that are of interest to users. The list of the features
j
can be stored as a set Fmap = {(pj , Featurej ), j = 1, ..., nF }, where pj = (xj , yf ) is the
f
f
f
location of feature j and Featurej is the feature’s name and nF is the total number of](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-74-2048.jpg)
![Chapter 5. Simple Navigation System
62
map features defined on the map.
5.3
Path Routing Module
At the beginning of the actual navigation, the device first obtains the user’s input of
the desired destination and user’s current location, which can be either specified by the
user or estimated by the device using the proposed tracking system. Then, the system
identifies the source node, vsource and the target node, vtarget on the connected graph
predefined in the setup stage, that are closest to the user’s current location and the
destination, respectively. The path routing problem is interpreted as finding the shortest
path between these two nodes on the connected graph [56]. This problem can be easily
solved by applying the Dijkstra algorithm, which is described in [69] and is summarized
in Fig. 5.2.
5.3.1
Path Analysis
After a set of nodes sequence, P, which constitutes the shortest path from the user’s
current position to the destination, is generated, the path is then analyzed to produce
necessary navigation information to the user.
The generated path is first divided into series of line segments, such that consecutive
line segments are pointing at different directions and the connected point between the
two segments becomes the turning point. This set of line segments extracted for the path
P can be denoted as Pl = {ℓ1 , ℓ2 , ...ℓS }, where S is the total number of line segments
i
i
and each segment is denoted as ℓi = {pi , pi }, where pi = (xi , ys ) and pi = (xi , ye )
e
e
s
s
e
s
are the starting and ending points of the ith line segment, respectively. The turning
points are identified as the ending points between line segments, that is T = {pi |i =
e
1, . . . , S − 1}. Based on these generated line segments, the system is able to determine
the turning points, the direction of turns and the distance traveled at each line segment](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-75-2048.jpg)
![63
Chapter 5. Simple Navigation System
Given:
Connected graph of the map layout with weight: G(E, V ), DG = [dGij ]|V |×|V |
Inputs:
User’s current location: p(t) → Source node: vsource
ˆ
Destination location → Target node: vtarget
Outputs:
A list of nodes of the shortest path from target node to source node: P
Dijkstra:
Initializations:
d = [d(1), ..., d(|V |)];
{d(vi ) = ∞, ∀vi ̸= vsource ∈ V },
e = [e(1), ..., e(|V |)];
{e(vi ) = −1, ∀vi ∈ V }
d(vSource ) = 0
Vunvisited := V
Actual operations:
while Vunvisited is not empty
u = arg min d,
remove u from Vunvisited
Vunvisisted
exit while loop if d(u) = ∞ or u == vtarget
for each v in Vunvisited
exit foreach loop ifdGuv == ∞
a = d(u) + dGuv ;
if a < d(v) then
d(v) = a;
Determine path sequence:
u := vtarget ,
P = {}
insert u at beginning of P and u := e(u) while e(u) ̸= −1
Figure 5.2: Dijkstra Algorithm
e(v) = u](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-76-2048.jpg)

![65
Chapter 5. Simple Navigation System
starts the tracking system to keep track of user’s position. For each tracking update,
the analysis module compares the location estimate to the routed path to check if the
user follows the path properly and then generate voice instructions when necessary. The
analysis process is illustrated in Fig. 5.3.
5.4.1
Analysis Process
The analysis module first determines if the user already reaches the destination by checking the Euclidean distance between the user’s current position and the target being within
a range of βdestination . If the user is at the destination, the module generates the voice instruction stating that the destination is reached and stops tracking system and navigation
module automatically.
ˆ
ˆ
ˆ
p(t ) = ( x(t ), y(t ))
p ie = (xie, yie )
p
i
i
i
i
p s = (x s, y s )
Figure 5.4: A point in close range to a line segment
Otherwise, the module attempts to match the user’s current position p(t) to one of
ˆ
the line segments in the generated path set Pl . If this tracking update is close to line
segment ℓi as illustrated in Fig. 5.4, then we can find the projection and the minimum
distance of the tracking update point p(t) to the line segment ℓi by solving the two
ˆ
equations [70]:
pi = pi + µi (pi − pi )
s
e
s
(5.1)
(p(t) − pi ) · (pi − pi ) = 0
ˆ
s
e
(5.2)
where pi is the projected point which is collinear with pi and pi , and µ is the ratio in
e
s
terms of the distance between pi and pi indicating how far the point pi is away from pi .
s
e
s](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-78-2048.jpg)
![Chapter 5. Simple Navigation System
66
By substituting (5.1) into (5.2), the solution to µi is
µi =
(p(t) − pi ) · (pi − pi )
ˆ
s
e
s
∥pi − pi ∥2
s
e
(5.3)
If the computed µi is within the range [0, 1], then the projected point falls onto the line
segment, which implies that the update estimate is within the range of this line segment.
By substituting (5.3) back into (5.1), the projected point pi can be computed and the
shortest distance of the tracking update point to the line segment can be obtained as
di = ∥p(t) − pi ∥.
ˆ
min
The system determines that the tracking estimate p(t) follows the line segment ℓi if
ˆ
i) µi ∈ [0, 1] and ii) di < βpath . If there are consecutively Noffpath tracking estimates
min
failing to match with any of the line segments in Pl , the analysis module assumes that
the user does not follow the path properly. Thus, the analysis module will ask the user
to stop walking and inputs the user’s current position as the starting point to the path
routing module to reroute an alternate path for the user to reach the destination.
The value of µi is also a good indicator to tell if the user is walking along the path
properly. In normal situation, where the user follows the path correctly, the value of µi
should increase from zero to one along the same line segment ℓi for consecutive tracking
updates and then eventually move to the next segment ℓi+1 , where the value of µi is no
longer valid and the value of µi+1 is then computed. Thus, when µi , i < S is close to
one, this indicates that the user is close to the end of the line segment ℓi , where a turn is
required for the user to move to the next line segment ℓi+1 . The direction of turn can be
determined by finding the positive angle difference, ∆ρi between the two vectors that are
formed by joining the starting and ending points of the current and next line segments
as illustrated in Fig. 5.5. For simplicity, the module only identifies either a left or right
turn.
The module assumes a very simple scheme to determine the orientation of the mobile
user. For each tracking update, a direction vector is computed between the current update
and the previous one and then is compared with the currently matched line segment](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-79-2048.jpg)
![67
Chapter 5. Simple Navigation System
1) ∆ρ i = ρ i +1 − ρ i
2) if ∆ρ i < 0°, then ∆ρ i = ∆ρ i + 360°
pie = (x ie, yie ) = Pi+1s = (x i+1s, yi+1s )
ρ i +1
3) if ∆ρ i ≈ 90°, then it is a right turn
ρi
else if ∆ρ i ≈ 180°, then it is a left turn
pis = (x is, yis )
P
i+1
i+1
e
= (x
e,
y
i+1
e
)
Figure 5.5: Determining the direction of turn based on the two line segments ℓi and ℓi+1
direction. If consecutive Nwrong
direction
tracking updates are in opposite direction of the
line segment, then a voice command of wrong direction is issued to the user.
Finally, the analysis module computes the Euclidean distance between the user’s
i
current estimate p(t) to the map features in Fpath , where i corresponds to the line segment
ˆ
i that the user is currently following. If the distance is smaller than βf , then the module
will generate the corresponding voice command regarding this specific map features to
the user.
5.4.2
Voice Generation
The voice instructions of the analysis module can be generated on-the-fly by using textto-speech (TTS) engine. However, TTS engines are not readily available for free to be
used on smart devices and render delays in giving real-time instructions to the user. Thus,
the navigation system uses an alternate method to obtain the voice commands. Since the
navigation system only has a small library of instructions, all of these commands are first
created and saved as audio files during initial setup. The audio can be generated from
R
text by using the online AT&T Natural Voices⃝ Text-to-Speech Demo [71]. Then, the
analysis module determines which instructions are needed and plays the corresponding
audio files. Although these audio files occupy extra amount of memory spaces on the
smart devices, the system is able to generate reliable voice instructions in real time, which](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-80-2048.jpg)
![Chapter 6
Software Implementation on Mobile
Devices
This chapter describes how the indoor CS-based positioning and tracking system, along
with the navigation application described in Chapters 3 to 5 are implemented as a software on the PDAs and smartphones.
6.1
Software Platform
The software is developed on PDAs and smartphone that are installed with Windows Mobile operating systems to implement the proposed indoor tracking and navigation system.
Unlike Android platform [72], which has become popular just recently and only available on android-powered smartphones, the Windows Mobile platform has been developed
maturely and in addition to Window Mobile-powered smartphones, such platforms have
also been used on PDAs. The development of software application for the iPhone is also
ruled out as the wifi scanning functionality, which is the core requirement for the indoor
tracking system, is not provided by the Apple’s official software development kit (SDK).
Although there are private libraries available online to provide that function, they require
the jailbreaking of the iphone and thus violate the Apple’s development license [73], [74].
69](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-82-2048.jpg)
![70
Chapter 6. Software Implementation on Mobile Devices
The software is written in C# using Microsoft .Net Compact Framework version 3.5 in
Visual Studio 2008. It utilizes two open source libraries available on the internet to relieve
the burden on developing the application on this platform. They are the OpenNetCF
library [75] and the DotNetMatrix library [76], which provide the WiFi RSS scanning
functions and basic matrix operations respectively.
6.2
Devices in Testing
The developed software has been deployed onto three different devices and their specifications in comparison to a standard laptop of the same price level (around $ 600) are
shown in Table 6.1 [77–80].
Devices
Processor
RAM
Speed
Window Mobile
WLAN
Version
hx4700
PDA2: HP iPAQ 624 MHz
128 MB
hx2750
Smartphone:
800 MHz
256 MB
Pocket PC 2003 802.11b
1
ple/second
Pocket PC 2003 802.11b
1
2nd
64 MB
ning Rate
2nd
PDA1: HP iPAQ 624 MHz
ple/second
Professional
802.11b/g 0.67
Samsung Omnia II
Dell
Inspiron
WiFi Scan-
sam-
sam-
sam-
ple/second
15 2.2 GHz
4 GB
Windows 7
802.11g
Laptop
Table 6.1: Devices Specifications
It is obvious that the PDAs and smartphone have much more restricted resources in
processing power and memory than a standard laptop. Thus, indoor tracking systems
that use probabilistic approach [38] and particle filters [47, 51, 81] that require large
computation power may not be realizable on these devices. The proposed indoor tracking](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-83-2048.jpg)
![Chapter 6. Software Implementation on Mobile Devices
71
system is implemented on these devices to illustrate that such system is a compact
algorithm that is able to provide real-time and accurate estimate of user’s location. The
performances of these devices are evaluated in Chapter 7.
Note that the Samsung smartphone is equipped with an accelerometer and a digital
compass. By using the Samsung Mobile SDK [82], the software is able to access these two
sensors. The maximum sampling interval that can be set by the SDK for these sensors
is 200 milliseconds. Attempts have been made to let the system utilize both sensors in
aiding to determine the user’s travel distances and orientations. However, the phone is
incompetent to handle both sampling of the sensors’ data and scanning the WiFi RSS
from APs at the same time and thus the program becomes unstable and often crashes
unexpectedly. Besides, the sampling rate and the response are too slow for both sensors
to let the system obtain useful real-time data within a short time interval for the tracking
updates. Thus, these sensors are not incorporated into the proposed tracking system in
this thesis.
Both of the PDAs use the WiFi network adaptor as the basic wireless connection
method, unlike the smartphone, which cellular reception precedes the WiFi reception.
Thus, the signal strength level and the refresh rate of the WiFi antenna of the smartphone are inferior to the ones in PDAs. By using the OpenNetCF library, the software
is able to detect the WiFi adaptor on the devices and then scan the detectable APs
with their unique media access control (MAC) address as their identifications and their
RSS readings. All the three devices require a duration of one second to accomplish this
operation. However, tests have shown that the smartphone is required to wait for 500
milliseconds between each scanning operations, rather than 100 milliseconds for both
PDAs, in order to detect valid RSS readings, thus proved that the refresh rate for smartphone is slower. Since the PDAs have a faster refresh rate, the performance evaluations
in the next chapter are focused on these PDAs.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-84-2048.jpg)
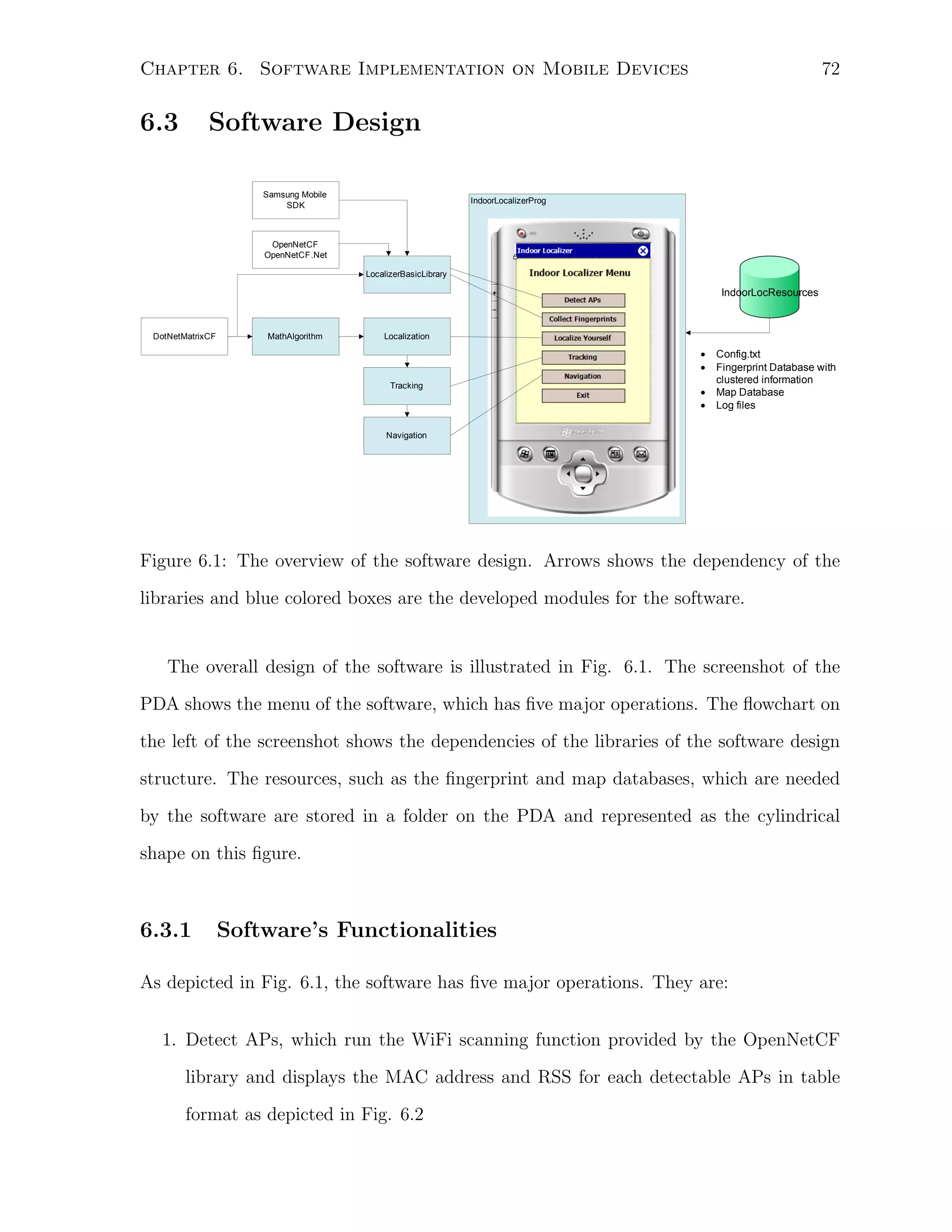

![Chapter 6. Software Implementation on Mobile Devices
74
map of the region of interest, is included to allow the software to use it to collect fingerprints and displays user’s location properly on the screen. This image map is stored
as a bitmap format and is scaled, so that it can be showed properly on the screen of
smart devices. The same image map file is used by all the three devices and their image
pixel to actual distance meter scale is included in the Config.txt to allow the system to
estimate the actual distance according to the map. During the initial setup, the user
uses the Collect Fingerprint functions to collect fingerprint database and map features
which are all stored in this folder. The raw fingerprint database is then transferred to a
computer to generate clusters based on Section 3.2.2 using affinity propagation algorithm
and put this cluster information back to the PDA’s resources folder. Then, the online
operations: localization, tracking and navigation obtain the fingerprint database and the
map database from this folder to achieve their purposes.
6.3.3
Libraries’ Definitions
Fig. 6.1 shows that the software is divided into six blocks of libraries. These libraries
are organized so that each individual block deals with one specific task and allows the
developer to modify these codes easily. These libraries are:
• MathAlgorithm This library contains the math algorithms that are required by
the proposed system. It uses the open source library DotNetMatrix to perform
the standard matrix operations. The four algorithms defined in this library are i)
affinity propagation algorithm, which is converted from matlab code found in [15];
ii) ℓ1 -minimization by using primal-dual interior point method, known as basis
pursit, which is also converted from matlab code found in CS-solver ℓ1 -Magic [65];
iii) Dijkstra algorithm as depicted in Fig. 5.2 and iv) the Kalman Filter as defined
in Section 4.2. Although the affinity propagation algorithm is implemented, the
software can only handle the computation for a small number of collected RPs.
It complains for the lack of memory and crashes when the number of collected](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-87-2048.jpg)

![78
Chapter 7. Experimental Results
Sites in Study
Dimensions
# of additional Total # Device
#
deployed APs
of APs
in Test
of
RPs
Bahen 4th Floor
30 m × 31 m 8
26
PDA1
72
CNIB 2nd Floor
35 m × 71 m 15
23
PDA2
128
Table 7.1: Comparison of experimental sites
that are already equipped with access points (APs), whose settings and positions are
unknown. Besides the original access points, several additional access points are deployed
in the experimental sites to ensure that the sites have enough reliable RSS readings to
estimate the locations accurately. The additional deployed APs denoted in Table 7.1 are
the off-the-shelf access points, Cisco Linksys Wireless-G Router WRT54G2, which are
set to have maximum transmission power 18dBm and set to transmit signals at channel
1. Note that all RSS readings collected by the devices are in dBm scale.
Bahen Center: Positioning Analysis
The first experimental site is a part of the fourth floor of the eight storey building, Bahen
centre at the University of Toronto [83]. The main focus of this site is to analyze the
performance of the CS-based positioning system as described in Chapter 3. The region
of interest is a office area with a L-shaped corridor with a dimension of 30 m × 31 m,
which is comparable to those experimented in [19, 28, 38, 49]. Including the 8 additional
deployed access points, which are spread across the whole area, a total of 26 access points
can be detected. Both the PDA1 and Smartphone as defined in Table 6.1 are used
for the fingerprint collection, but the analysis of the positioning system is mainly based
on the PDA1 device, as it can obtain a better RSS fingerprint database due to better
antenna and faster WiFi scanning rate than the Smartphone.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-91-2048.jpg)
![Chapter 7. Experimental Results
80
spread across the area of interest were collected as the stationary user set.
CNIB: Tracking and Navigation Analysis
The evaluation of the performance of the proposed tracking and navigation systems
described in Chapter 4 and 5 took place on the second floor of CNIB, located in midtown Toronto. Subject testings were also conducted at this site to evaluate the usefulness
of the navigation system to the visually impaired people. This building is designed to
provide easy accessibility to anyone, especially the visually impaired people [84]. The area
of dimensions 35 m × 71 m, which is larger than the experimental site at Bahen Centre,
consists of a main straight central hallway connected to a C-shaped small corridor that
leads to different conference rooms. Unlike the campus areas, such as the Bahen centre,
which are densely populated with access points, there are only a few APs detectable in
the CNIB. Thus, 15 additional APs are deployed throughout the whole area, creating a
total of 23 APs that can be used in the experiments. All the three devices described in
Table 6.1 are used to collect the fingerprint database, but the analysis of the tracking and
navigation systems is mainly focused on the PDA2 device, as it has the best fingerprint
database in terms of the number of real RSS readings from detectable APs, whereas the
other two devices often cannot obtain the RSS readings from APs during the sampling
periods.
Fingerprint Collections Similar to the fingerprint collection process at the Bahen
Centre, 50 RSS time samples were collected for each orientation at each RP by all the
devices, except the Smartphone, which only 40 RSS time samples were collected instead.
A total of 128 RPs, which were evenly distributed along the hallway and corridors with an
average grid spacing of 1.5m were collected by PDA2. The number of RPs collected by
the PDA1 (120 RPs) and Smartphone (126 RPs) varied slightly as they were operated
by different individuals. It took about 10 days to finish this offline phase.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-93-2048.jpg)
![81
Chapter 7. Experimental Results
Mobile User Testing Data In order to evaluate the performance of the tracking
system, several traces were collected on a different day by PDA2. The user carried the
PDA2 device, which obtained RSS samples at every second, and walked at a constant
speed along 4 different traces, as summarized in Table 7.2. The actual locations of the
user for each step can be deduced based on the user’s speed and elapsed time.
Trace #
# of turns # Repetitions Distance Average Duration
1
2
4
53.63m
156.3s
2
2
4
29.43m
89.2s
3
0
4
30.80m
84.6s
4
4
2
91.84m
279.5s
Table 7.2: Traces Summary
7.1.2
Performance Benchmarks
The performance of the proposed positioning system is compared to two methods. The
first one is the KNN method [19], described in Section 2.2.1, which is a simple technique
that can be easily implemented on the mobile devices. In the following experiments, three
neighbors (k = 3) are used to estimate the user’s location. Another one is the kernelbased method [38], which is summarized in Fig. 2.1. The computation of this probabilistic
approach technique involves all the RSS time samples collected during the offline phase
and thus requires more processing time and resources. It may not be realizable by the
mobile devices, as they have limited processing power and memory.
As for the proposed tracking system, two performance benchmarks are used for comparison. They are the original proposed positioning system and the direct application of
the Kalman filter on the original proposed positioning system.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-94-2048.jpg)
![84
Chapter 7. Experimental Results
6
5
5
4
4
Frequency
7
6
Frequency
7
3
3
2
2
1
1
0
−55
−50
−45
−40
RSS Readings [dBm]
−35
−30
0
−120
(a) RSS collected by PDA1
−110
−100
−90
−80
RSS Readings [dBm]
−70
−60
−50
(b) RSS collected by Smartphone
Figure 7.1: Example histograms of RSS distributions of the same access point over 50
time samples for different devices pointing North at the same reference point on Bahen
fourth floor.
−45
−30
PDA1 − North
Smartphone − North
−40
−50
PDA1 − North
Smartphone − North
−50
RSS Average [dBm]
RSS readings [dBm]
−55
−60
−70
−80
−60
−65
−70
−90
−75
−100
−110
0
5
10
15
20
25
Time [s]
30
35
40
45
(a) RSS measurements over time
50
−80
0
5
10
15
20
25
30
Number of RSS time samples
35
40
45
50
(b) RSS averages across time samples
Figure 7.2: An example of RSS measurements over time and their averages with respect
to the number of time samples of the same access point for different devices at the same
reference point on Bahen fourth floor.
RSS Distribution Across Reference Points
The RSS distributions in spatial domain are shown in Fig. 7.3. Several observations are
made from these figures. First, the orientation of the antenna of the same device affects
the RSS variations slightly as illustrated in Fig. 7.3a. Second, the variations of RSS are
much larger when different devices are used as shown in Fig. 7.3b. However, the trends](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-97-2048.jpg)
![85
Chapter 7. Experimental Results
of the RSS distributions across the spatial domain are similar for all these cases. This
particular access point is located close to the 20th RP, thus the RSS at this RP is the
strongest and decreases as the RPs are moving away from the access point. Note that
there is a second peak of the RSS value at the 6th RP, as this RP is in the same corridor
where the AP is located.
−20
−20
PDA1 − North
PDA1 − South
PDA1 − North
Smartphone − North
−40
RSS Readings [dBm]
−30
−40
RSS Readings [dBm]
−30
−50
−50
−60
−60
−70
−70
−80
0
10
20
30
40
50
Reference Points Indices
60
(a) Different Orientations
70
80
−80
0
10
20
30
40
50
Reference Points Indices
60
70
80
(b) Different Devices
Figure 7.3: An example of averaged RSS of the same access point in spatial domain for
different orientations and different devices on Bahen fourth floor.
7.2.2
Offline Phase: Clustering Results by Affinity Propagation
The fingerprint database collected by the PDA1 are used for the analysis of the CS-based
positioning system. As described in Chapter 3, the fingerprints are first pre-processed
during the offline phase to generate clusters that are required for the later coarse location
stage.
Effect of Preferences on the Number of Clusters Generated
According to (3.5), γ (o) is determined experimentally to obtain desirable number of clusters for the fingerprints. The number of clusters generated by affinity propagation using
different values of γ (o) is shown in Fig. 7.4. Since the medians of the similarities defined
in (3.4) are negative, smaller values of γ (o) result in larger values of preferences and hence](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-98-2048.jpg)
![86
Chapter 7. Experimental Results
more clusters; this is a property for the affinity propagation algorithm [15]. The number
of clusters generated for different orientations are very similar for the same value of γ (o)
as RSS only varies slightly for different orientations.
40
North − γ(0°)
East − γ(90°)
35
South − γ(180°)
(270°)
West − γ
Number of Clusters
30
25
20
15
10
5
0
0
0.2
0.4
0.6
0.8
1
1.2
1.4
1.6
1.8
2
γ(o)
Figure 7.4: Number of clusters generated by the affinity propagation algorithm depending
on the value of parameter γ (o) for four orientations on Bahen fourth floor.
Generated Clusters Result
The number of desirable clusters required by the CS-based positioning system is determined based on two criteria. First, most of the RPs from the same generated cluster
should be geographically close to each other to minimize the number of distant outliers.
This can be done by observing the clustering results generated in the above section using different values of γ (o) . Second, the number of clusters should reasonably divide the
fingerprints into smaller regions. If there are too few clusters, it leads to more RPs to be
included for the fine localization stage and thus increases the computation cost in solving
the ℓ1 minimization problem, whereas too many clusters are undesirable as well, as the
fine localization stage within a small set of RPs becomes insignificant.
The clustering results used by the CS-based positioning system for the following
experiments are obtained by first setting the parameters γ (o) for the affinity propagation
algorithm as in Table 7.3 and then reassigning the outliers that are physically far away
from their own clusters to their geographically surrounding clusters. A total of 56 clusters](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-99-2048.jpg)
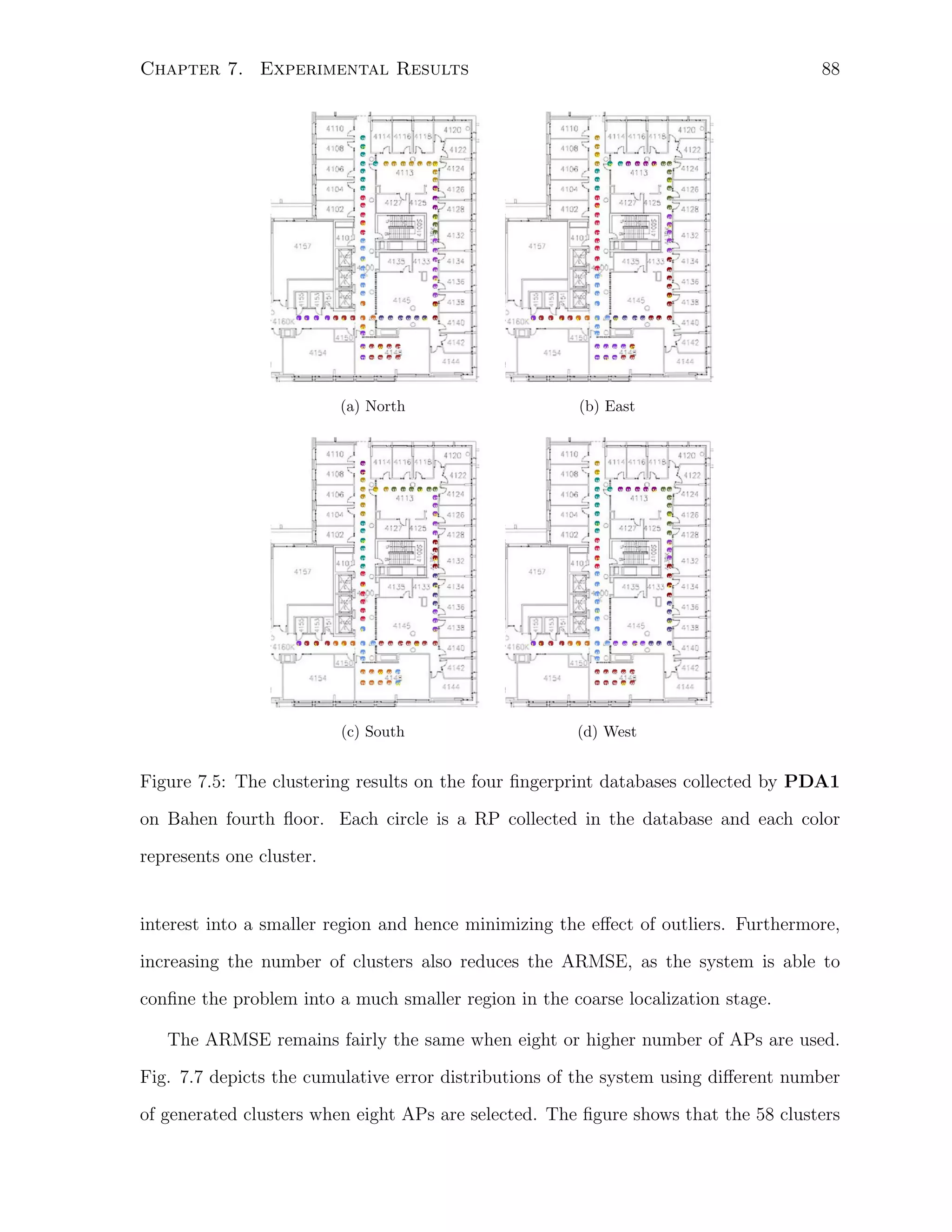
![89
Chapter 7. Experimental Results
used by the system achieve the best performance and attain the smallest maximum error.
Note that the error obtained from the stationary user testing set is slightly higher. This
is justified, as this set of data is collected on a different day and thus their RSS readings
are varied from the fingerprint database, introducing errors in estimations.
10
10
No clustering
No clustering
(o)
29 clusters; γ =1
9
9
29 clusters; γ(o)=1
8
43 clusters; γ(o)=0.5
58 clusters; actual clusters used by system
(o)
43 clusters; γ =0.5
58 clusters; actual clusters used by system
8
7
6
6
ARMSE [m]
ARMSE [m]
7
5
4
5
4
3
3
2
2
1
1
0
5
10
15
Number of APs Used
20
0
25
(a) Validation Data
5
10
15
Number of APs Used
20
25
(b) Stationary User Testing Data
Figure 7.6: The ARMSE versus number of used APs, when different number of generated
clusters are used for the coarse localization on Bahen fourth floor
0.9
0.8
0.8
Cumulative Error Probability
1
0.9
Cumulative Error Probability
1
0.7
0.6
0.5
0.4
No clustering
29 clusters; γ(o)=1
0.3
0.2
43 clusters; γ =0.5
58 clusters; actual clusters used by system
2
4
6
8
10
Distance Error [m]
12
(a) Validation Data
14
0.6
0.5
0.4
No clustering
29 clusters; γ(o)=1
0.3
(o)
0
0.7
16
0.2
43 clusters; γ(o)=0.5
58 clusters; actual clusters used by system
0
2
4
6
8
10
Distance Error [m]
12
14
16
(b) Stationary User Testing Data
Figure 7.7: The cumulative error distributions using different number of clusters for the
coarse localization on Bahen fourth floor. (8 APs are used)](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-102-2048.jpg)
![90
Chapter 7. Experimental Results
Different Matching Schemes
Section 3.3.1 describes several cluster matching schemes that can be used to select the
clusters, which best matched to the online RSS measurement vector r. Fig. 7.8 shows
the comparison of using different matching schemes. It is obvious that in the validation
set, the schemes that are applied on the strongest APs set have better accuracies and
they have similar performances, except that the exemplar-based scheme has a higher
maximum error. However, this trend is not as obvious as in the stationary user testing
set, as the gap between the schemes with and without the use of strongest APs set is very
small. In fact, the weighted average applied on the strongest APs set attains the highest
maximum error. According to both sets of data, the average based strongest APs cluster
matching scheme is a good choice for the system and is selected as the default operation
for the coarse localization stage as it gives reliable results in both sets.
1
0.9
0.8
0.8
Cumulative Error Probability
Cumulative Error Probability
1
0.9
0.7
0.6
0.5
Exemplar−based
Average−based
Weighted Average
Exemplar−based + Strongest APs
Average−based + Strongest APs
Weighted Average + Strongest APs
0.4
0.3
0.2
0
2
4
6
8
Distance Error [m]
10
0.7
0.6
0.5
Exemplar−based
Average−based
Weighted Average
Exemplar−based + Strongest APs
Average−based + Strongest APs
Weighted Average + Strongest APs
0.4
0.3
0.2
12
(a) Validation Data
0
2
4
6
8
Distance Error [m]
10
12
(b) Stationary User Testing Data
Figure 7.8: The cumulative error distributions using different cluster matching schemes
on Bahen fourth floor. (8 APs are used)
7.2.4
Online Phase: Fine Localization Analysis
This section focuses on the evaluation of using different settings for the fine localization
stage.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-103-2048.jpg)

![92
Chapter 7. Experimental Results
3.4
3.4
Strongs APs
Fisher Criterion
Random Combination
3.2
3
2.8
ARMSE [m]
3
2.8
ARMSE [m]
Strongs APs
Fisher Criterion
Random Combination
3.2
2.6
2.4
2.2
2.6
2.4
2.2
2
2
1.8
1.8
1.6
1.6
1.4
5
10
15
Number of APs Used
20
1.4
25
(a) Validation Data
5
10
15
Number of APs Used
20
25
(b) Stationary User Testing Data
Figure 7.9: The ARMSE versus number of used APs, using different AP schemes for fine
localization on Bahen fourth floor.
interpretation. According to this experiments, this threshold should be set to λ1 = 0.4
to let the system have the best performance.
2.2
2.1
2.1
ARMSE [m]
2.3
2.2
ARMSE [m]
2.3
2
1.9
2
1.9
1.8
1.8
1.7
1.7
1.6
0.3
1.6
0.4
0.5
0.6
λ1
0.7
0.8
0.9
(a) Validation Data
0.3
0.4
0.5
0.6
λ1
0.7
0.8
0.9
(b) Stationary User Testing Data
Figure 7.10: Effect of the threshold λ1 on ARMSE on Bahen fourth floor. (8 APs are
used)
7.2.5
Performance Comparison
Throughout the above experimentations, a set of optimal parameters that gives the best
performance of the CS-based positioning system can be determined and is given in Table](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-105-2048.jpg)

![94
Chapter 7. Experimental Results
0.9
0.8
0.8
Cumulative Error Probability
1
0.9
Cumulative Error Probability
1
0.7
0.6
0.5
0.4
KNN
Kernel−based
CS−based Positioning
0.3
0.2
0
2
4
6
8
10
Distance Error [m]
12
14
0.7
0.6
0.5
0.4
KNN
Kernel−based
CS−based Positioning
0.3
16
(a) Validation Data
0.2
0
2
4
6
8
10
Distance Error [m]
12
14
16
(b) Stationary User Testing Data
Figure 7.11: The cumulative error distributions using different positioning systems on
Bahen fourth floor. (8 APs are used)
Method
ARMSE [m]
Mean [m]
90th Percentile [m]
Max[m] Variance [m2 ]
KNN
2.02
1.78
3.15
17.3
5.74
Kernel-based
1.87
1.56
3.78
13.39
3.99
CS-based
1.57
1.29
2.84
7.19
1.51
Table 7.5: Position error statistics for different methods on Bahen fourth floor. (For
validation set)
Method
ARMSE [m]
Mean [m]
90th Percentile [m]
Max[m] Variance [m2 ]
KNN
2.00
1.76
3.39
8.35
2.51
Kernel-based
2.19
1.86
3.81
10.54
3.81
CS-based
1.92
1.67
3.38
7.16
1.76
Table 7.6: Position error statistics for different methods on Bahen fourth floor. (For
stationary user testing set)
Computation Time
R
Fig. 7.12 shows the computation time required for each step on a 2.50GHz Intel⃝ Core
TM
2 Quad processor with 4GB RAM using the three different localization techniques. Since](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-107-2048.jpg)
![95
Chapter 7. Experimental Results
the Kernel-based method is a probabilistic approach that incorporates all RSS time
samples from the fingerprint database for computation, it requires much more time to
obtain the estimated position than the other two methods. Its computation time also
increases as the number of used APs increases. Due to its high-volume computation cost,
it is not desirable to implement on the resource-limited mobile devices as a real-time
positioning system. Although the CS-based system requires a little more computation
time than the KNN method, its simplicity and accuracy makes it a good method to be
implemented on any mobile device.
0.03
0.025
0.025
Mean Computation Time [s]
0.035
0.03
Mean Computation Time [s]
0.035
0.02
KNN
Kernel−based
CS−based Positioning
0.015
0.02
KNN
Kernel−based
CS−based Positioning
0.015
0.01
0.01
0.005
0.005
0
4
6
8
10
12
14
16
Number of APs Used
18
20
22
24
(a) Validation Data
26
0
4
6
8
10
12
14
16
Number of APs Used
18
20
22
24
26
(b) Stationary User Testing Data
Figure 7.12: Comparison of mean computation time using different positioning systems
in Bahen fourth floor. (8 APs are used)
7.3
Tracking Results on CNIB Second Floor
In this section, the performance of the proposed tracking system described in Chapter 4
is evaluated based on the RSS data collected by the PDA2 device on the second floor of
CNIB.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-108-2048.jpg)
![97
Chapter 7. Experimental Results
12
6
10
5
8
10
4
9
8
7
5
Frequency
Frequency
Frequency
6
6
3
4
4
2
2
1
3
2
1
0
−120
−110
−100
−90
−80
−70
RSS Readings [dBm]
−60
−50
−40
(a) RSS collected by PDA1
0
−66
−65
−64
−63
−62 −61 −60 −59
RSS Readings [dBm]
−58
−57
0
−120
−56
−110
−100
−90
RSS Readings [dBm]
−80
−70
−60
(b) RSS collected by PDA2 (c) RSS collected by Smartphone
Figure 7.13: Example histograms of RSS distributions of the same access point over
50 time samples (40 time samples for Smartphone) for different devices at the same
reference point in CNIB second floor.
−45
−40
PDA1 − North
PDA2 − North
Smartphone − North
−50
−50
−55
RSS Average [dBm]
RSS readings [dBm]
−60
−70
−80
−60
−65
−70
−90
−110
−75
PDA1 − North
PDA2 − North
Smartphone − North
−100
−80
0
5
10
15
20
25
Time [s]
30
35
40
45
(a) RSS distributions across time
50
−85
0
5
10
15
20
25
30
Number of RSS time samples
35
40
45
50
(b) RSS averages across time samples
Figure 7.14: An example of RSS distributions across time and their averages with respect
to the number of time samples of the same access point for different devices at the same
reference point in CNIB second floor.
part of the CNIB second floor does not have a good coverage of the APs, which leads
to poor clustering results around that region and makes the system hard to identify the
correct clusters during the coarse localization stage. This also explains why the system
attains very high maximum error, as it selects the wrong regions for localization. This
effect is less prominent for the KNN method, as it compares the online RSS measurement](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-110-2048.jpg)
![98
Chapter 7. Experimental Results
−40
−40
PDA2 − North
PDA2 − South
PDA1 − North
PDA2 − North
Smartphone − North
−60
RSS Readings [dBm]
−50
−60
RSS Readings [dBm]
−50
−70
−80
−70
−80
−90
−90
−100
−100
−110
0
5
10
15
Reference Points Indices
20
25
(a) Different Orientations
30
−110
0
5
10
15
Reference Points Indices
20
25
30
(b) Different Devices
Figure 7.15: An example of RSS distributions of the same access point in spatial domain
for different orientations and different devices in CNIB second floor. (only a part of the
fingerprints are shown)
(a) North (11 Generated Clusters)
(b) East (17 Generated Clusters)
(c) South (15 Generated Clusters)
(d) West (16 Generated Clusters)
Figure 7.16: The clustering results on the four fingerprint databases collected by PDA2
on CNIB second floor
readings to each of the RP’s RSS values instead of a subset of them.
The proposed tracking system described in Chapter 4 is able to improve the CS-](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-111-2048.jpg)
![99
Chapter 7. Experimental Results
Total number of generated clusters
59
Coarse Localization - cluster matching scheme Average-based + Strongest APs
Coarse Localization - α1
0.99
Fine Localization - AP selection scheme
Random combination
Fine Localization - λ1
0.4
Number of APs used
10
Table 7.7: A set of optimal parameters for the CS-based position system applied on
CNIB second floor.
based positioning system by using previous history to ensure it chooses the correct relevant region during the coarse localization stage and smooths out the trajectory by the
application of the Kalman filter. Their analysis are in the following sections.
1
0.9
Cumulative Error Probability
0.8
0.7
0.6
0.5
0.4
0.3
0.2
KNN
Kernel−based
CS−based
0.1
0
0
2
4
6
8
10
12
Distance Error [m]
14
16
18
Figure 7.17: The cumulative error distributions for different positioning systems on CNIB
second floor. (10 APs are used)
7.3.3
Modified Coarse Localization Analysis
In this section, the use of different schemes to choose the RPs which are in physical proximity to the previous estimate, described in Section 4.3.1, are examined. The covariances](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-112-2048.jpg)
![100
Chapter 7. Experimental Results
Method
ARMSE [m]
Mean [m]
90th Percentile [m]
Max[m] Variance [m2 ]
KNN
3.02
2.56
4.84
16.55
3.49
Kernel-based
3.73
3.06
6.24
15.30
6.31
CS-based
3.28
2.68
5.26
26.64
4.79
Table 7.8: Positioning error statistics for different positioning methods on CNIB second
floor. (For mobile user testing set)
of the process and measurement noises of the Kalman filter are set to S = diag(1) and
U = diag(80), where diag(d) refers to a diagonal matrix with the diagonal entries set to
the scalar value d.
According to Section 4.3.1, there are two parameters to be set for choosing the relevant
RPs depending on their geographical locations to the previous user’s location. The first
parameter is to decide whether the previous estimated location (Unpredicted ) should be
used for the distance calculations to the RPs or the predicted location using the Kalman
filter estimated state vector (Predicted ) should be used. The second parameter is the
walking distance range β defined in (4.15) and (4.17).
Fig. 7.18 shows the ARMSE versus the walking distance range β when different
schemes are used. Both schemes work the best when β = 4. In addition, the Unpredicted
one works better than the Predicted one. This happens as the Predicted scheme may
not be able to predict the correct user’s current location and thus introduce errors when
including non-relevant RPs for the fine localization stage.
7.3.4
Map Adaptive Kalman Filter Analysis
In this section, the unpredicted user’s location and β = 0.4 are used for the coarse
localization stage and different parameters for the Kalman filter are examined.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-113-2048.jpg)
![101
Chapter 7. Experimental Results
2.9
2.8
Unpredicted
Predicted
2.7
ARMSE [m]
2.6
2.5
2.4
2.3
2.2
2.1
2
3
3.5
4
4.5
β [m]
5
5.5
6
Figure 7.18: Effect of the walking distance β on ARMSE in CNIB second floor. (10 APs
are used)
Sensitivity to the Covariances of Process and Measurement Noises.
Fig. 7.19 illustrates the performances of the proposed tracking system using different
combinations of covariances of process and measurement noises, S = diag(ds) and U =
diag(du), respectively. The performances are very similar for most of the combinations,
except for the case when ds = 10 and du = 80. It shows that the performance of the
proposed tracking system is not affected significantly by changing the parameters of the
Kalman filter.
1
0.9
Cumulative Error Probability
0.8
0.7
0.6
0.5
0.4
0.3
ds = 1, du = 80
ds = 1, du = 100
ds = 1, du = 50
ds = 10, du = 80
ds = 0.5, du = 80
0.2
0.1
0
0
2
4
6
Distance Error [m]
8
10
12
Figure 7.19: The cumulative error distributions using different Kalman filter parameters
in CNIB second floor. (10 APs are used)](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-114-2048.jpg)
![102
Chapter 7. Experimental Results
Resetting Kalman Filter at Intersections
Section 4.3.2 mentions that the Kalman filter should be reset at the intersections, where
there are a higher chance for the user to make turns and thus violate the linear motion
model assumed by the Kalman filter. Fig. 7.19 compares the performance with and
without resetting the Kalman filter at the intersections. Resetting the Kalman filter
at intersections improves the system’s accuracy. For the ARMSE, the resetting scheme
improves from 2.20m to 2.07m (6%) and at the 90th percentile, it improves from 3.76m
to 3.33m (11%).
1
0.9
Cumulative Error Probability
0.8
0.7
0.6
0.5
0.4
0.3
0.2
0.1
0
No reset Kalman filter at corner
Reset Kalman filter at corner
0
2
4
6
Distance Error [m]
8
10
12
Figure 7.20: The cumulative error distributions for different Kalman filter update schemes
in CNIB second floor. (10 APs are used)
7.3.5
Performance Comparison
From the above analysis, a set of optimal parameters that gives the best performance for
the proposed tracking system is shown in Table 7.9. This tracking system is compared
with the original CS-based positioning system and the direct applications of the Kalman
filter on both the KNN method and the CS-based positioning system. Fig. 7.21 shows the
comparison results in terms of cumulative error distributions and Table 7.10 shows the
position error statistics for these four systems. The proposed tracking system outperforms](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-115-2048.jpg)
![103
Chapter 7. Experimental Results
the other three methods. It reduces the ARMSE by 1.27m (39%), 0.64m (27%) and 0.53m
(21%) over the CS-based positioning system, the KNN method with the Kalman filter
and the CS-based position system with the Kalman filter, respectively. In addition, the
proposed tracking system also has the smallest 90th percentile error and variance when
compared to the other systems.
Modified Coarse Localization - Comparison schemes
Non-Prediction scheme
Modified Coarse Localization - β
4m
Kalman Filter Covariances
S = diag(1) U = diag(80)
Table 7.9: A set of optimal parameters for the proposed tracking system applied on CNIB
second floor.
1
0.9
0.8
Cumulative Error Probability
0.7
0.6
0.5
0.4
0.3
0.2
CS−based
KNN + Kalman Filter
CS−based + Kalman Filter
Proposed Tracking
0.1
0
0
2
4
6
Distance Error [m]
8
10
12
Figure 7.21: The cumulative error distributions using the CS-based positioning system
and the three tracking systems in CNIB second floor. (10 APs are used)
Some of the example trace results are shown in Fig. 7.22. The estimated traces by the
proposed tracking system are able to follow the actual traces walked by the user. These
traces certainly improve the locations estimated by the CS-based positioning system
shown as green dots on the figures.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-116-2048.jpg)
![104
Chapter 7. Experimental Results
Method
ARMSE [m]
Mean [m]
90th Percentile [m]
Max [m] Var [m2 ]
CS-based Positioning
3.28
2.68
5.26
26.64
4.79
KNN +
2.75
2.41
4.41
10.95
2.42
2.54
2.17
4.15
24.10
2.69
2.01
1.74
3.36
17.93
1.91
Kalman Filter
CS-based +
Kalman Filter
Proposed Tracking
Table 7.10: Position error statistics for the CS-based positioning system and the two
tracking systems on CNIB second floor. (For mobile user testing set)
(a) Trace #1
(b) Trace #2
(c) Trace #3
(d) Trace #4
Figure 7.22: Example trace results. The black line is the actual trace, the green dots
are the CS-based positioning results and the purple line is the results of the proposed
tracking system.
7.3.6
Navigation and Real Time Implementations
Using the PDA2, which is installed with the developed software that implemented the
proposed positioning and tracking system as described in Chapter 6, the user is able to](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-117-2048.jpg)
![Chapter 7. Experimental Results
105
obtain the real-time estimated position updates periodically from the device. In addition,
the user is able to use the navigation function provided by the software.
The navigation module of the software requires the input of the map database, which
helps the module to generate useful guidance to the user according to his locations. Fig.
7.23 depicts the definition of the connected graph and the map features on CNIB second
floor, which are obtained according to Section 5.2.
Figure 7.23: The definition of the connected graph and the map features on CNIB second
floor. The blue lines and blue circles represent the edges and nodes of the connected
graph. The red squares represents the destinations. The diamonds represents the map
features and the pink circles represents the locations of the 15 deployed access points
At the beginning of the navigation, the device asks the user to enter the desired target
and then the module will route the path and play appropriate audio files to ask the user
to follow the path. The actual operations of the navigation can be found in Chapter 5.
Fig. 7.24 shows an example screenshot that is obtained from the device at the end of the
real experiment carried on the CNIB second floor. The device is able to track the user’s
trajectory and give appropriate commands accordingly. Several video files can be found
online in [85] to show the actual experiments conducted on CNIB second floor.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-118-2048.jpg)
![Chapter 7. Experimental Results
106
Figure 7.24: Example screenshot of the software that shows the actual track that the
user is walking. The line shows the routed path generated by the navigation module.
The squares denote the user’s locations and the circle denotes the destination.
7.3.7
Subject Testing
A preliminary research study was conducted over two months (in July and August 2010)
at this site in collaboration with the CNIB research unit to evaluate if such navigation
software developed on the smart device is useful in providing guidance to people with low
vision, as defined according to [86]. Before the actual testing, the subject’s visual acuity
was first examined by a doctor for low vision. A total of 16 visually impaired subjects
with an average age of 55 took part in this study and they were randomly assigned
into two groups, each group contains 8 subjects: i) subjects in the Control group were
only given instructions at the beginning of the test to reach the target by themselves;
whereas ii) subjects in the Testing group were given the PDA2, which provided real-time
navigation to guide them to the target. Each subject carried either a mobility cane or a
guide dog and was required to walk three pre-determined paths, which are the same as
the first three testing traces in the mobile user testing data. Table 7.11 gives a summary
about these traces. The results of this study are summarized in Table 7.12. Successful
trial means that the subject is able to reach the destination at the end of the test.
Several observations can be made according to the results in Table 7.12:
• The Testing group has a higher successful rate than the Control group. Since the](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-119-2048.jpg)

![Chapter 7. Experimental Results
108
about the surrounding area, the users spend extra time to get familiar with the
building. Second reason is due to hardware limitations of the PDA2. The slow
response of the WiFi network adaptor of the PDA2 and the duration time to play
the instructions lead to the slow actual update rate of the tracking system. Hence,
the subjects are required to walk slowly to accommodate these limitations.
This study shows positive results that the navigation software is useful to give realtime guidance to the visually impaired people. However, further research is required to
improve the actual tracking rate of the system. This may be done by using a different
device that has a better processor, memory or WiFi network adaptor than PDA2.
7.4
Chapter Summary
This chapter evaluates the performances of the proposed CS-based positioning and tracking system. There are two experimental sites. The experiments carried on the fourth
floor of Bahen Centre focus on the analysis of the CS-based positioning system, whereas
the analysis of the proposed tracking system is done on second floor of the CNIB. The
CS-based positioning system outperforms the KNN and kernel-based methods on the Bahen fourth floor and the proposed tracking system is able to further improve the accuracy
in estimating the user’s locations on the CNIB second floor. This lightweight algorithm
can be implemented as a software on the resource-limited mobile devices, such as PDAs
and smartphones. Furthermore, a simple navigation module is included and the real-time
performance can be found in [85].](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-121-2048.jpg)

![Chapter 8. Conclusion
111
show that the system is able to track the users’ trajectories properly and give useful
guidance.
8.1
Future Works
There are several problems that can be explored to further enhance the performance of
the proposed WLAN positioning and tracking system. They are listed as follow:
• Besides the WiFi adapter, most of the smartphones and PDAs are now equipped
with extra sensors, such as accelerometer and digital compass. The information
generated from these sensors can be interpreted as user’s walking distances and
orientations. Although the samsung smartphone evaluated in this thesis is incompetent to handle the WiFi scanning and the operations of the sensors together,
recent smartphones are equipped with higher performance processor [87] and may
allow the sensors to be used in conjunction to the WLAN positioning system.
Thus, the proposed positioning system should be extended to use the information
obtained from these sensors to improve the accuracy of the estimated position.
• One of the disadvantages of using a fingerprinting based methods is the high labour
and time cost for collecting the required fingerprint database during the offline
phase. Since the fingerprints can be considered sparse in terms of the spatial
domain for the whole region of interest, the compressive sensing theory may be
applied on a smaller set of RPs to produce a larger radio map to reduce the time
to collect the fingerprints.
• In addition to using the CS theory to reduce the number of fingerprints, empirical
indoor radio propagation models may be used in conjunction to the fingerprinting
process to interpolate the RSS of extra RPs based on a small set of fingerprints, as
Fig. 7.3 and Fig. 7.15 show that the signal strength varies smoothly over spatial](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-124-2048.jpg)
![Chapter 8. Conclusion
112
domain.
• The proposed positioning system is device-dependent, thus the fingerprinting process must be done for each different mobile devices. Recent studies show that using
signal strength differences (SSD) between pairs of APs instead of RSS can improve
the accuracy of the position estimate when different devices are used in a small
region [33]. Thus, research and analysis can be done to evaluate if the proposed
positioning system can use the SSD as the measurement metric.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-125-2048.jpg)
![Bibliography
[1] K. W. Kolodziej and J. Hjelm, Local Positioning Systems: LBS Applications and
Services. Taylor & Francis Group, 2006.
[2] A. Kushki, K. N. Plataniotis, and A. N. Venetsanopoulos, “Kernel-Based Positioning
in Wireless Local Area Networks,” Mobile Computing, IEEE Transactions on, vol. 6,
no. 6, pp. 689 –705, June 2007.
[3] A. Brimicombe and C. Li, Location-Based Services and Geo-Information Engineering. Wiley-Blackwell, 2009.
[4] M. Rodriguez, J. Favela, E. Martinez, and M. Munoz, “Location-Aware Access
to Hospital Information and Services,” IEEE Trans. Information Technology in
Biomedicine, vol. 8, no. 4, pp. 448–455, 2004.
[5] P. Thornycroft, “Location-based services for cellular phones using Wi-Fi: The University of Cincinnati’s system for emergency call location,” University of Cincinnati,
White Paper, 2009.
[6] A. LaMarca and E. de Lara, Location Systems: An Introduction to the Technology Behind Location Awareness, ser. Synthesis Lectures on Mobile and Pervasive
Computing. Morgan and Claypool Publishers, 2008.
113](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-126-2048.jpg)
![114
Bibliography
[7] G. Sun, J. Chen, W. Guo, and K. J. R. Liu, “Signal Processing Techniques in
Network-Aided Positioning: A Survey of State-of-the-art Positioning Designs,”
IEEE Signal Processing Magazine, vol. 22, no. 4, pp. 12–23, 2005.
[8] H. Liu, H. Darabi, P. Nanerjee, and J. Liu, “Survery of Wireless Indoor Positioning
Techniques and Systems,” IEEE Transactions on Systems, Man and CyberneticsPart C: Applications and Reviews, vol. 37, no. 6, pp. 1067–1080, Novermber 2007.
[9] A. Varshavsky, D. Pankratov, J. Krumm, and E. de Lara, “Calibree: Calibration-free
localization using relative distance estimations,” in Sixth International Conference
on Pervasive Computing (Pervasive), Sydney, Australia, May 2008.
[10] A. Varshavsky, E. de Lara, J. Hightower, A. LaMarca, and V. Otsason, “GSM Indoor
Localization,” Pervasive and Mobile Computing Journal (PMC), vol. 3, no. 6, pp.
698–720, December 2007.
[11] W. ur Rehman, E. de Lara, and S. Saroiu, “CILoS: A CDMA Indoor Localization
System,” in 10th International Conference on Ubiquitous Computing (Ubicomp),
Seoul, South Korea, September 2008.
[12] R. Mautz, “The challenges of indoor environments and specification on some alternative positioning systems,” in Positioning, Navigation and Communication, 2009.
WPNC 2009. 6th Workshop on, March 2009, pp. 29 –36.
[13] L. Jing, P. Liang, C. Maoyong, and S. Nongliang, “Super-resolution time of arrival
estimation for indoor geolocation based on IEEE 802.11 a/g,” in Intelligent Control
and Automation, 2008. WCICA 2008. 7th World Congress on, June 2008, pp. 6612
–6615.
[14] “Aeroscout company.” [Online]. Available:
difference
http://www.aeroscout.com/content/](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-127-2048.jpg)
![115
Bibliography
[15] B. J. Frey and D. Dueck,
“Clustering by Passing Messages Between
Data Points,” Science, vol. 315, pp. 972–976, 2007. [Online]. Available:
www.psi.toronto.edu/affinitypropagation
[16] E. J. Cand`s and M. B. Wakin, “An introduction to compressive sampling,” IEEE
e
Signal Processing Magazine, vol. 25, no. 2, pp. 21–30, March 2008.
[17] J. Hightower and G. Borriello, “Location systems for ubiquitous computing,” Computer, vol. 34, no. 8, pp. 57 –66, August 2001.
[18] “Ekahau Real Time Location System (RTLS) Overview,” 2010. [Online]. Available:
http://www.ekahau.com/products/real-time-location-system/overview.html
[19] P. Bahl and V. N. Padmanabhan, “RADAR: an in-building RF-based user location
and tracking system,” in INFOCOM 2000. Nineteenth Annual Joint Conference of
the IEEE Computer and Communications Societies. Proceedings. IEEE, vol. 2, 2000,
pp. 775 –784.
[20] ——, “Enhancements to the RADAR User Location and Tracking System,” Microsoft Research, Tech. Rep., February 2000.
[21] “Place lab:
A privacy-observant location system.” [Online]. Available:
http:
//www.placelab.org/
[22] K. Kaemarungsi and P. Krishnamurthy, “Properties of indoor received signal
strength for wlan location fingerprinting,” in Mobile and Ubiquitous Systems: Networking and Services, 2004. MOBIQUITOUS 2004. The First Annual International
Conference on, aug. 2004, pp. 14 – 23.
[23] C. Feng, W. S. A. Au, S. Valaee, and Z. Tan, “Compressive Sensing Based Positioning Using RSS of WLAN Access Points,” in INFOCOM, 2010 Proceedings IEEE,
March 2010, pp. 1 –9.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-128-2048.jpg)
![Bibliography
116
[24] ——, “Orientation-aware indoor localization using affinity propagation and compressive sensing,” in Computational Advances in Multi-Sensor Adaptive Processing
(CAMSAP), 2009 3rd IEEE International Workshop on, December 2009, pp. 261
–264.
[25] A. Bensky, Wireless Positioning Technologies and Applications. Artech House, Inc.,
2008.
[26] R. Singh, L. Macchi, C. Regazzoni, and K. Plataniotis, “A statistical modelling
based location determination method using fusion in WLAN,” in Proceedings of the
International Workshop on Wireless Ad-hoc Networks, 2005.
[27] N. K. Sharma, “A weighted center of mass based trilateration approach for locating
wireless devices in indoor environment,” in Proceedings of the 4th ACM international
workship on Mobility management and wireless access, 2006, pp. 112–115.
[28] K. Kaemarungsi and P. Krishnamurthy, “Modeling of indoor positioning systems
based on location fingerprinting,” in INFOCOM 2004. Twenty-third AnnualJoint
Conference of the IEEE Computer and Communications Societies, vol. 2, March
2004, pp. 1012 – 1022 vol.2.
[29] A. Goldsmith, Wireless Communications, 1st ed. Cambridge University Press, 2005.
[30] B. Li, Y. Wang, H. K. Lee, A. Dempster, and C. Rizos, “Method for yielding a
database of location fingerprints in WLAN,” Communications, IEEE Proceedings-,
vol. 152, no. 5, pp. 580 – 586, October 2005.
[31] J. Yin, Q. Yang, and L. M. Ni, “Learning Adaptive Temporal Radio Maps for SignalStrength-Based Location Estimation,” Mobile Computing, IEEE Transactions on,
vol. 7, no. 7, pp. 869 –883, July 2008.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-129-2048.jpg)
![Bibliography
117
[32] K. Kaemarungsi, “Distribution of WLAN received signal strength indication for
indoor location determination,” in Wireless Pervasive Computing, 2006 1st International Symposium on, January 2006, p. 6 pp.
[33] A. K. M. Mahtab Hossain, H. N. Van, Y. Jin, and W.-S. Soh, “Indoor Localization
Using Multiple Wireless Technologies,” in Mobile Adhoc and Sensor Systems, 2007.
MASS 2007. IEEE Internatonal Conference on, October 2007, pp. 1 –8.
[34] V. Honkavirta, T. Perala, S. Ali-Loytty, and R. Piche, “A comparative survey of
WLAN location fingerprinting methods,” in Positioning, Navigation and Communication, 2009. WPNC 2009. 6th Workshop on, March 2009, pp. 243 –251.
[35] B. Li, J. Salter, A. G. Dempster, and C. Rizos, “Indoor positioning techniques based
on wireless lan,” in 1st IEEE Internal Conference on Wireless Broadband & Ultra
Wideband Communications, March 2006, pp. 13–16.
[36] M. Youssef and A. Agrawala, “The Horus WLAN location determination system,”
in MobiSys ’05: Proceedings of the 3rd international conference on Mobile systems,
applications, and services. New York, NY, USA: ACM, 2005, pp. 205–218.
[37] T. Roos, P. Myllym¨ki, H. Tirri, P. Misikangas, and J. Siev¨nen, “A Probabilistic
a
a
Approach to WLAN User Location Estimation,” Internation Journal of Wireless
Information Networks, vol. 9, no. 3, pp. 155–164, July 2002.
[38] A. Kushki, “A Cognitive Radio Tracking System for Indoor Environments,” Ph.D.
dissertation, University of Toronto, 2008.
[39] M. Youssef, A. Agrawala, and A. U. Shankare, “WLAN Location Determination via
Clustering and Probability Distributions,” in Proc, First IEEE Int’l Conf, Pervasive
Computing and Comm, 2003, pp. 143–155.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-130-2048.jpg)
![Bibliography
118
[40] Y. Chen, Q. Yang, J. Yin, and X. Chai, “Power-Efficient Access-Point Selection
for Indoor Location Estimation,” IEEE Transactions on Knowledge and Data Engineering, vol. 19, no. 7, pp. 877–888, July 2006.
[41] I. Guvenc, C. T. Abdallah, R. Jordan, and O. Dedeoglu, “Enhancements to RSS
Based Indoor Tracking Systems Using Kalman Filters,” in Global Signal Processing
Expo and International Signal Processing Conference, 2003.
[42] J. A. Besada, A. M. Bernardos, P. Tarrio, and J. R. Casar, “Analysis of tracking
methods for wireless indoor localization,” in Wireless Pervasive Computing, 2007.
ISWPC ’07. 2nd International Symposium on, February 2007.
[43] A. Kushki, K. N. Plataniotis, and A. N. Venetsanopoulos, “Location Tracking in
Wireless Local Area Networks with Adaptive Radio MAPS,” in Acoustics, Speech
and Signal Processing, 2006. ICASSP 2006 Proceedings. 2006 IEEE International
Conference on, vol. 5, May 2006, pp. V –V.
[44] F. Evennou and F. Marx, “Improving positioning capabilities for indoor environments with Wifi,” in IST Summit, 2005.
[45] J. Yim, S. Jeong, J. Joo, and C. Park, “Utilizing Map Information for WLANBased Kalman Filter Indoor Tracking,” in Future Generation Communication and
Networking Symposia, 2008. FGCNS ’08. Second International Conference on, vol. 5,
December 2008, pp. 58 –62.
[46] Y. Song and H. Yu, “A RSS Based Indoor Tracking Algorithm via Particle Filter
and Probability Distribution,” in Wireless Communications, Networking and Mobile
Computing, 2008. WiCOM ’08. 4th International Conference on, October 2008, pp.
1 –4.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-131-2048.jpg)
![Bibliography
119
[47] M. S. Arlampalam, S. Maskell, N. Gordon, and T. Clapp, “A Tutorial on Particle
Filters for Online Nonlinear/NonGaussian Bayesain Tracking,” IEEE Transactions
on Signal Processing, vol. 50, no. 2, pp. 174–188, February 2002.
[48] H. Wang, H. Lenz, A. Szabo, J. Bamberger, and U. D. Hanebeck, “Enhancing
the map usage for indoor location-aware systems,” in HCI’07: Proceedings of the
12th international conference on Human-computer interaction. Berlin, Heidelberg:
Springer-Verlag, 2007, pp. 151–160.
[49] C.-H. Chao, C.-Y. Chu, and A.-Y. Wu, “Location-Constrained Particle Filter human
positioning and tracking system,” in Signal Processing Systems, 2008. SiPS 2008.
IEEE Workshop on, October 2008, pp. 73 –76.
[50] Widyawan, M. Klepal, and S. Beauregard, “A novel backtracking particle filter
for pattern matching indoor localization,” in MELT ’08: Proceedings of the first
ACM international workshop on Mobile entity localization and tracking in GPS-less
environments. New York, NY, USA: ACM, 2008, pp. 79–84.
[51] H. Wang, H. Lenz, A. Szabo, J. Bamberger, and U. Hanebeck, “WLAN-Based Pedestrian Tracking Using Particle Filters and Low-Cost MEMS Sensors,” in Positioning,
Navigation and Communication, 2007. WPNC ’07. 4th Workshop on, March 2007,
pp. 1 –7.
[52] O. Woodman and R. Harle, “Pedestrian localisation for indoor environments,” in
UbiComp ’08: Proceedings of the 10th international conference on Ubiquitous computing. New York, NY, USA: ACM, 2008, pp. 114–123.
[53] I.-E. Liao and K.-F. Kao, “Enhancing the accuracy of WLAN-based location determination systems using predicted orientation information,” Inf. Sci., vol. 178, no. 4,
pp. 1049–1068, 2008.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-132-2048.jpg)
![Bibliography
120
[54] R. Zhou, “Wireless Indoor Tracking System (WITS),” in doIT Conference on Software Research, 2006, pp. 163–177.
[55] A. Kushki, K. N. Plataniotis, and A. N. Venetsanopoulos, “Intelligent Dynamic
Radio Tracking in Indoor Wireless Local Area Networks,” Mobile Computing, IEEE
Transactions on, vol. 9, no. 3, pp. 405 –419, March 2010.
[56] P.-Y. Gilli´ron and B. Merminod, “Personal Navigation System for Indoor Applicae
tions,” in Proceedings of the 11th IAIN World Congress, 2003.
[57] A. Butz, J. Baus, A. Kr¨ger, and M. Lohse, “A hybrid indoor navigation system,”
u
in IUI ’01: Proceedings of the 6th international conference on Intelligent user interfaces. New York, NY, USA: ACM, 2001, pp. 25–32.
[58] H. Huang, G. Gartner, M. Schmidt, and Y. Li, “Smart Environment for Ubiquitous
Indoor Navigation,” in New Trends in Information and Service Science, 2009. NISS
’09. International Conference on, June 2009, pp. 176 –180.
[59] H. Wu, A. Marshall, and W. Yu, “Path Planning and Following Algorithms in
an Indoor Navigation Model for Visually Impaired,” in Internet Monitoring and
Protection, 2007. ICIMP 2007. Second International Conference on, July 2007, pp.
38 –38.
[60] M. Swobodzinskia and M. Raubalb, “An Indoor Routing Algorithm for the Blind:
Development and Comparison to a Routing Algorithm for the Sighted ,” International Journal of Geographical Information Science, vol. 23, pp. 1315–1343, October
2009.
[61] T. Kanungo, D. M. Mount, N. Netanyahu, C. Piatko, R. Silverman, and A. Y.
Wu, “An Efficient k-Means Clustering Algorithm: Analysis and Implementation,”
IEEE Transactions on Pattern Analysis and Machine Intelligence, vol. 24, no. 7, pp.
881–892, July 2002.](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-133-2048.jpg)
![Bibliography
121
[62] D. Donoho, “Compressive sensing,” IEEE Transactions on Information Theory,
vol. 4, no. 4, pp. 1289–1306, April 2006.
[63] R. Baraniuk, “Compressive sensing,” IEEE Signal Processing Magazine, vol. 24,
no. 4, pp. 118–121, July 2007.
e
[64] E. Cand`s, J. Romberg, and T. Tao, “Robust uncertainty principles: Exact recovery
from highly incomplete Fourier information,” IEEE Transactions on Information
Theory, vol. 52, no. 2, pp. 489–509, February 2006.
[65] E. Cand`s and J. Romberg, “ℓ1 -MAGIC: Recovery of Sparse Signals via Convex
e
Programming,” October 2005. [Online]. Available: http://www.acm.caltech.edu/
l1magic/
[66] J. Shawe-Taylor and N. Cristianini, Kernel Methods for Pattern Analysis.
Cam-
bridge University Press, 2004.
[67] C. Feng, S. Valaee, and Z. Tan, “Multiple target localization using compressive sensing,” in Global Telecommunications Conference, 2009. GLOBECOM 2009. IEEE,
November. 2009, pp. 1 –6.
[68] ——, “Localization of wireless sensors using compressive sensing for manifold learning,” in Personal, Indoor and Mobile Radio Communications, 2009 IEEE 20th International Symposium on, September 2009, pp. 2715 –2719.
[69] E. W. Dijkstra, “A Note on Two Problems in Connexion with Graphs,” Numerische
Mathematik, vol. 1, pp. 269–271, 1959.
[70] P. Bourke, “Minimum Distance Between A Point And A Line,” October 1988.
[Online]. Available: http://local.wasp.uwa.edu.au/∼pbourke/geometry/pointline/
R
[71] AT&T Labs, Inc. - Research, “AT&T Labs Natural Voices⃝ Text-to-Speect Demo.”
[Online]. Available: http://www2.research.att.com/∼ttsweb/tts/demo.php](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-134-2048.jpg)
![122
Bibliography
[72] “Android developers,” 2010. [Online]. Available: http://developer.android.com/
index.html
[73] Z. Kaleem, “iPhone WiFi Scanner Apps Banned By Apple,” March 2010. [Online].
Available: http://www.wlanbook.com/iphone-wifi-scanner-apps-banned-by-apple/
[74] R. Ritchie, “Apple Removing Wi-Fi Scanning Apps from App Store,” iPhone Dev
SDK Forum, March 2010. [Online]. Available: http://www.tipb.com/2010/03/04/
apple-removing-wifi-scanning-apps-app-store/
[75] “OpenNetCF, Smart Device Framework,” 2010. [Online]. Available:
http:
//www.opennetcf.com/cf/products/sdf.ocf
[76] “DotNetMatrix:
Simple Matrix Library for .NET,” 2010. [Online]. Available:
http://www.codeproject.com/KB/recipes/psdotnetmatrix.aspx
[77] “HP iPAQ hx4700 Specifications.” [Online]. Available: http://www.davespda.com/
hardware/pda/pocketpc/devicea8ba.html?142
[78] “HP iPAQ hx2750 Specifications.” [Online]. Available: http://reviews.cnet.com/
pdas/hp-ipaq-hx2750/4507-3127 7-31218727.html
[79] “Samsung Omnia II Specifications.” [Online]. Available: http://www.phonearena.
com/htmls/Samsung-Omnia-II-phone-p 3790.html
[80] “Dell Inspiron 15 Laptop Specifications.” [Online]. Available: http://www.dell.
com/ca/p/inspiron-15/pd?oc=ni152 f 2e&model id=inspiron-15
[81] F. Evennou, F. Marx, and E. Novakov, “Map-aided indoor mobile positioning system
using particle filter,” in Wireless Communications and Networking Conference, 2005
IEEE, vol. 4, 13-17 2005, pp. 2490 – 2494 Vol. 4.
[82] “Samsung mobile Innovator - Windows Mobile.” [Online]. Available:
//innovator.samsungmobile.com/platform.main.do?platformId=2
http:](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-135-2048.jpg)
![123
Bibliography
[83] “The Bahen Centre for Information Technology.” [Online]. Available:
http:
//www.greatspaces.utoronto.ca/projects/bahen.htm
[84] “CNIB Centre, Toronto: Accessibility.” [Online]. Available: http://www.cnib.ca/
en/about/facility/centre/accessibility/Default.aspx
[85] Wireless and I. R. Laboratory, “Indoor Navigation Demo - Route 1,” July
2010. [Online]. Available: http://www.wirlab.utoronto.ca/wirlab/Members/chen/
Demo-Navigation%20-%20Router%201.mp4/view
[86] CNIB, “Eye Conditions:
What is Low Vision?”
[Online]. Available:
http://www.cnib.ca/en/your-eyes/eye-conditions/low-vision/Default.aspx
[87] T. Wimberly, “LG to deliver first dual-core Android smartphones in Q4,”
September 2010. [Online]. Available: http://androidandme.com/2010/09/phones/
lg-to-deliver-first-dual-core-android-smartphones-in-q4/](https://image.slidesharecdn.com/au-anthea-ws-201011-masc-thesis-140209003417-phpapp02/75/Au-anthea-ws-201011-ma-sc-thesis-136-2048.jpg)
















![wronski_ugthesis[1]](https://cdn.slidesharecdn.com/ss_thumbnails/95db93fc-5f15-4802-985f-832034d277d7-150202014804-conversion-gate02-thumbnail.jpg?width=640&height=640&fit=bounds)






























![Coded Agents – with UiPath SDK + LangGraph [Virtual Hands-on Workshop]](https://cdn.slidesharecdn.com/ss_thumbnails/codedagentsdeck-251215155422-5497c599-thumbnail.jpg?width=640&height=640&fit=bounds)















