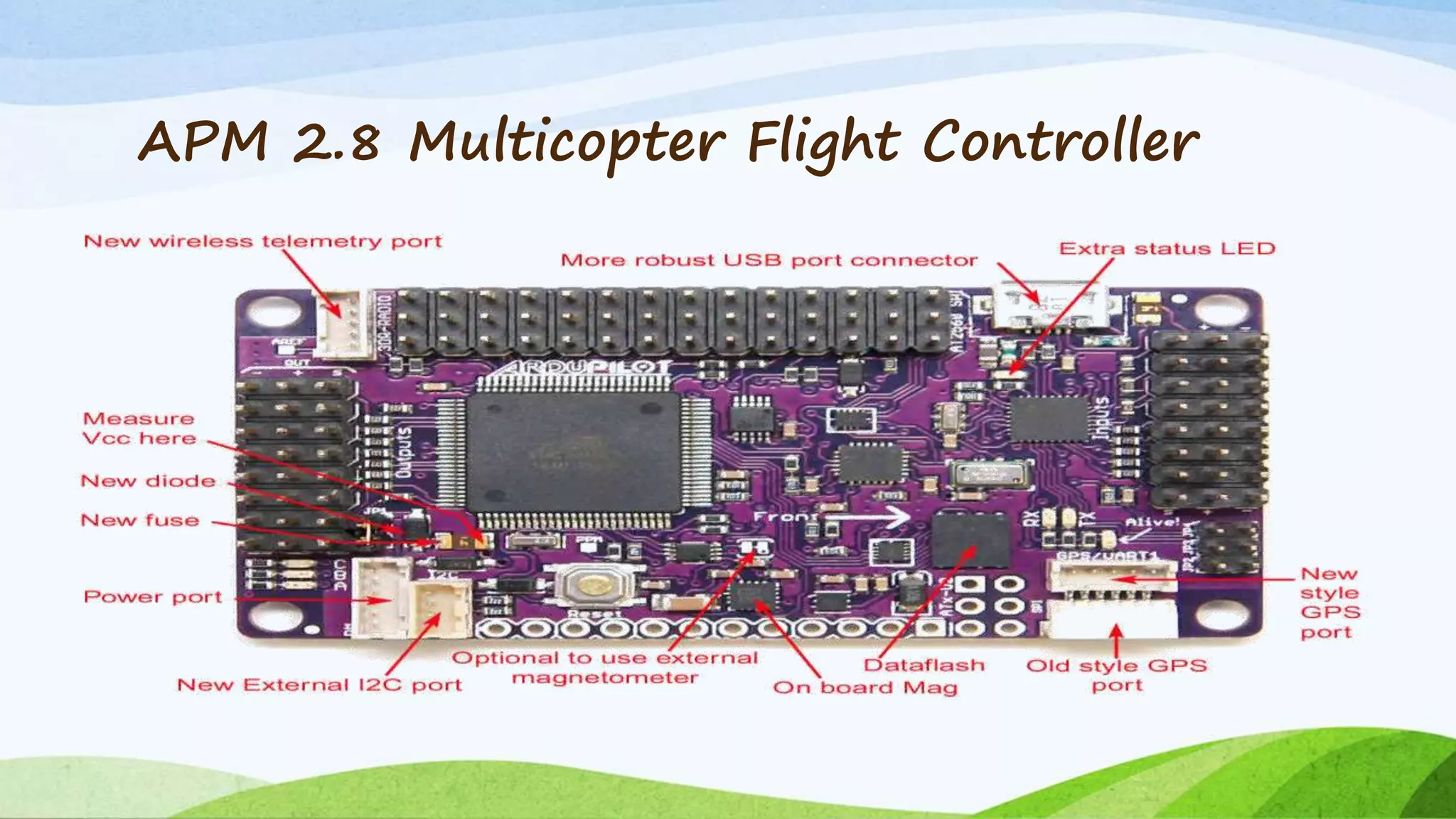
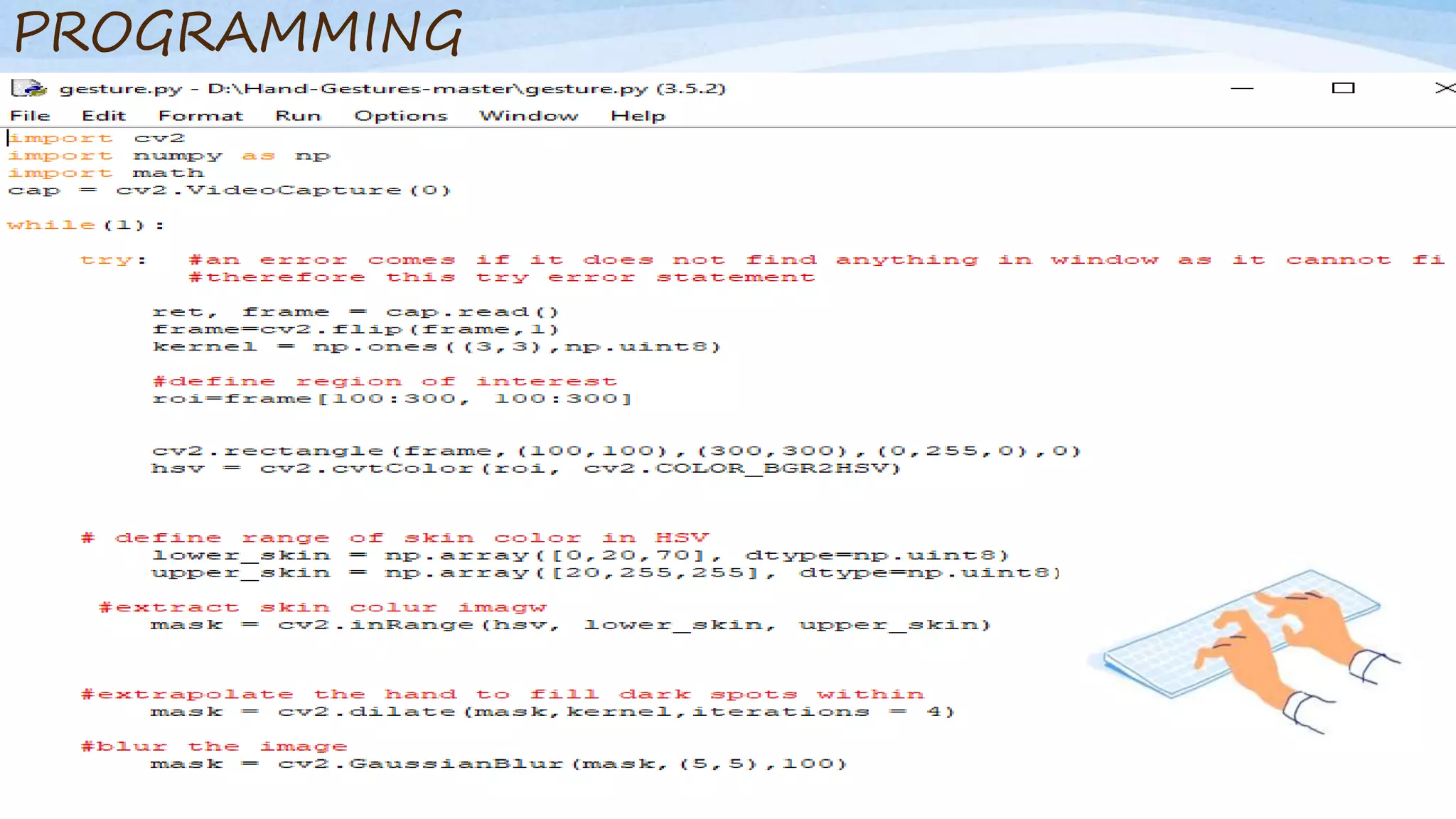
The document describes the development of an autonomous drone integrated with artificial intelligence and object detection capabilities. The drone is designed to follow a person or vehicle and respond during emergencies. It uses a Raspberry Pi computer along with cameras, sensors and a flight controller. The methodology involves building the drone, programming AI algorithms for object detection and tracking, and testing the autonomous functions. The goal is to create a user-friendly drone that can assist during emergencies or be used for surveillance through features like face recognition and response to detected signals.


























































![6 [progress report] for this leisurely side-project I was doing in 2016](https://cdn.slidesharecdn.com/ss_thumbnails/6progressreportforthisleisurelyside-projectiwasdoingin2016-210110122806-thumbnail.jpg?width=640&height=640&fit=bounds)

























