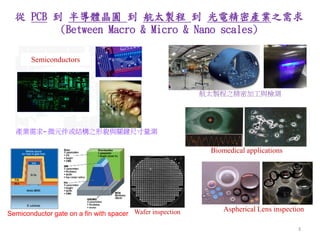
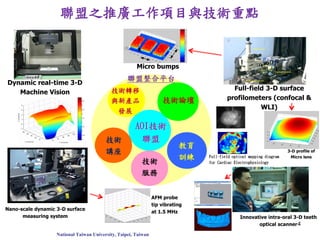
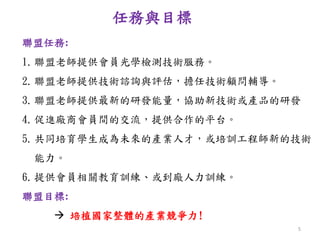
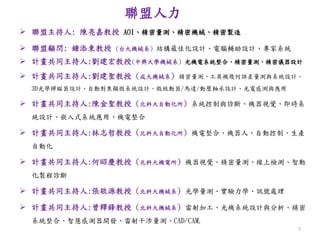
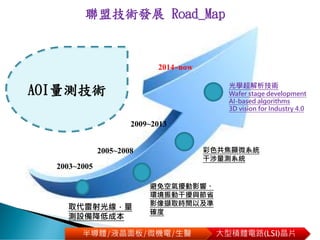
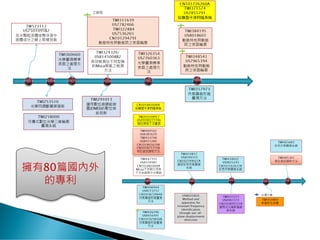
這份文檔介紹了由台灣大學及相關學術機構成立的先進自動化光學檢測設備研發聯盟,旨在促進學術界與產業界的合作,提升產業技術與人才培育。聯盟專注於共同人才培育、光學檢測技術服務和量測設備共享,針對半導體、航太等領域的技術需求進行研究與開發。文件詳述了聯盟的技術目標、成員、以及各項技術項目的進展。






















![射頻電子 - [第二章] 傳輸線理論](https://cdn.slidesharecdn.com/ss_thumbnails/ch2-150613065059-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)