Download as PDF, PPTX

![Providers do not fully expose a robot’s capabilities
‣ robots become end products (unless being a robot developer)
e.g. drones for photography / roombas for cleaning
MK:Smart++ [1]: integrating robots in cities
‣ data collectors (drones for parking monitoring)
‣ data consumers (adaptive self-driving cars)
Example : team of robots for green space maintenance
‣ available capabilities : e.g. teleoperation, video recording
‣ expertise required to program trajectories/object recognition
‣ different platforms require different experts
Motivation
[1] www.mksmart.org](https://image.slidesharecdn.com/2017kcap-171205223537/75/An-ontology-based-approach-to-improve-the-accessibility-of-ROS-based-robotic-systems-4-2048.jpg)
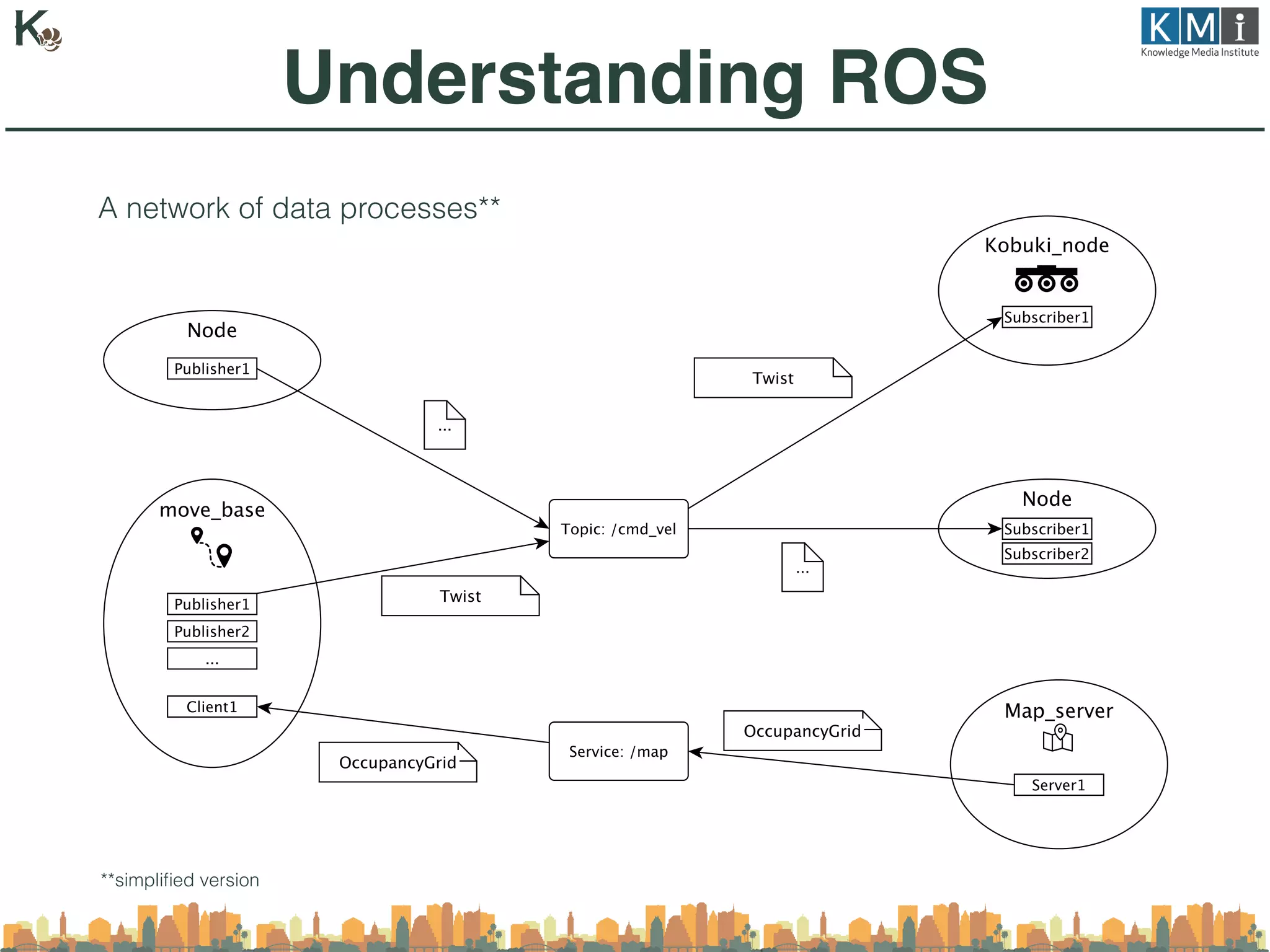
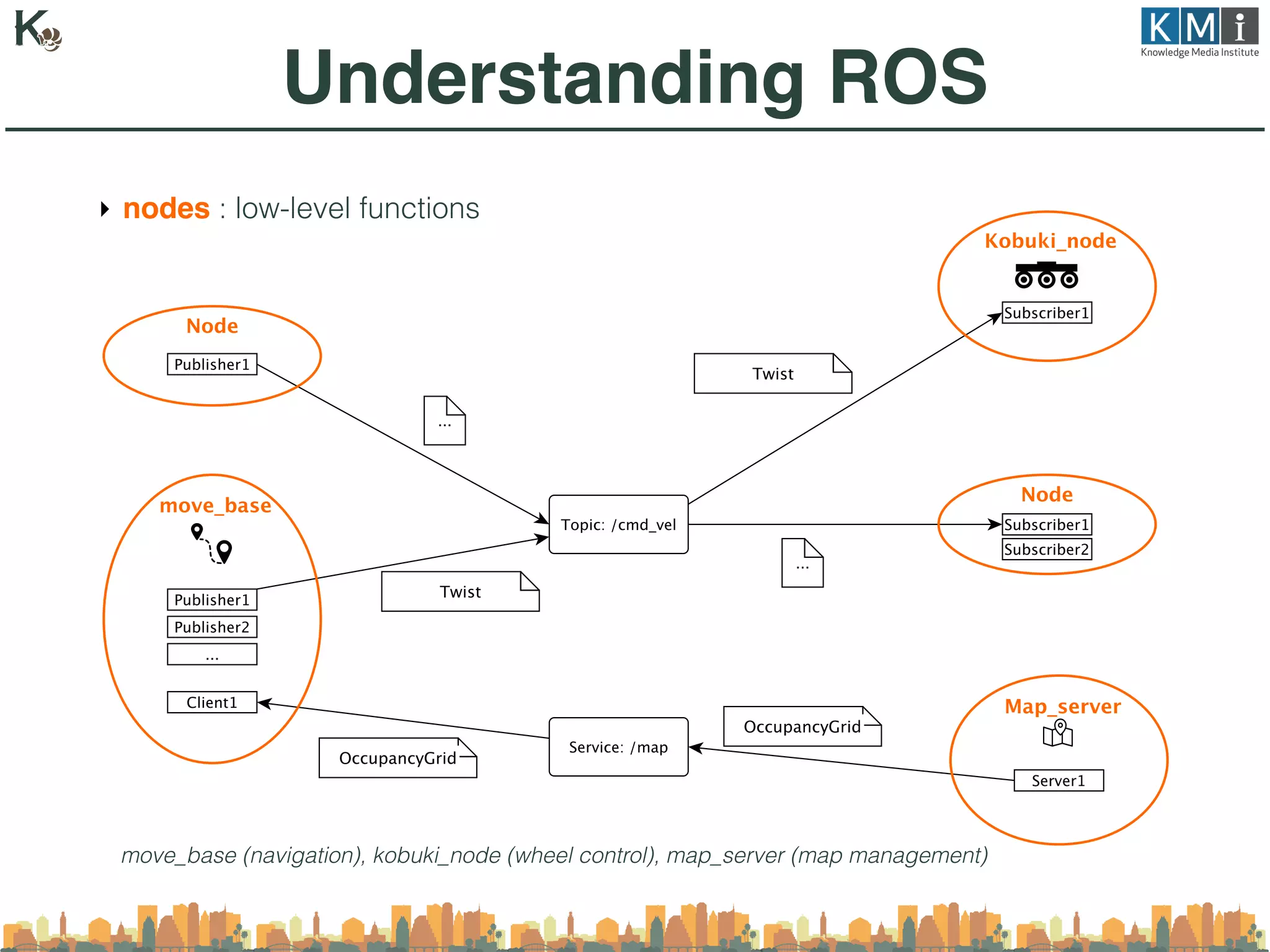
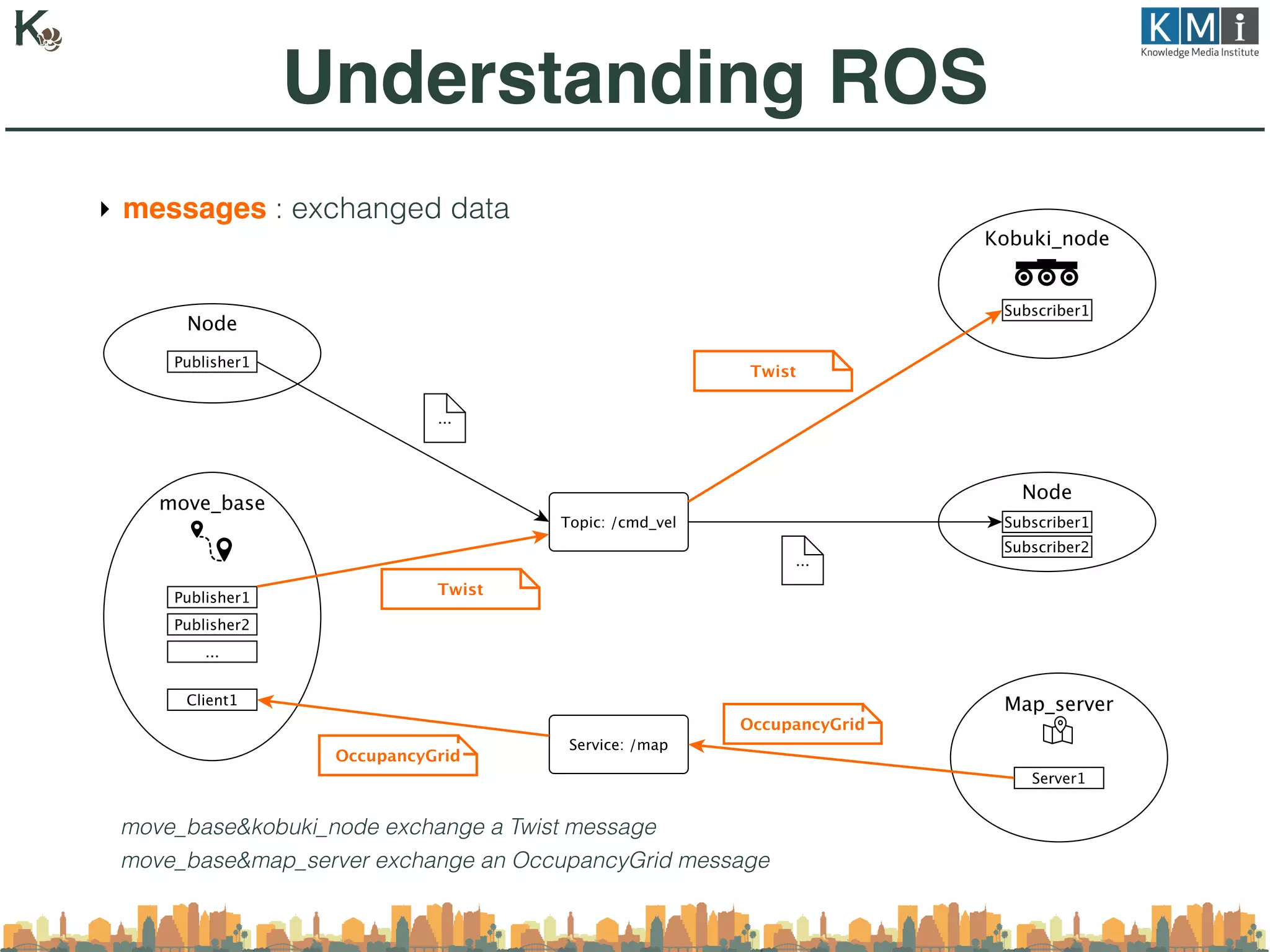
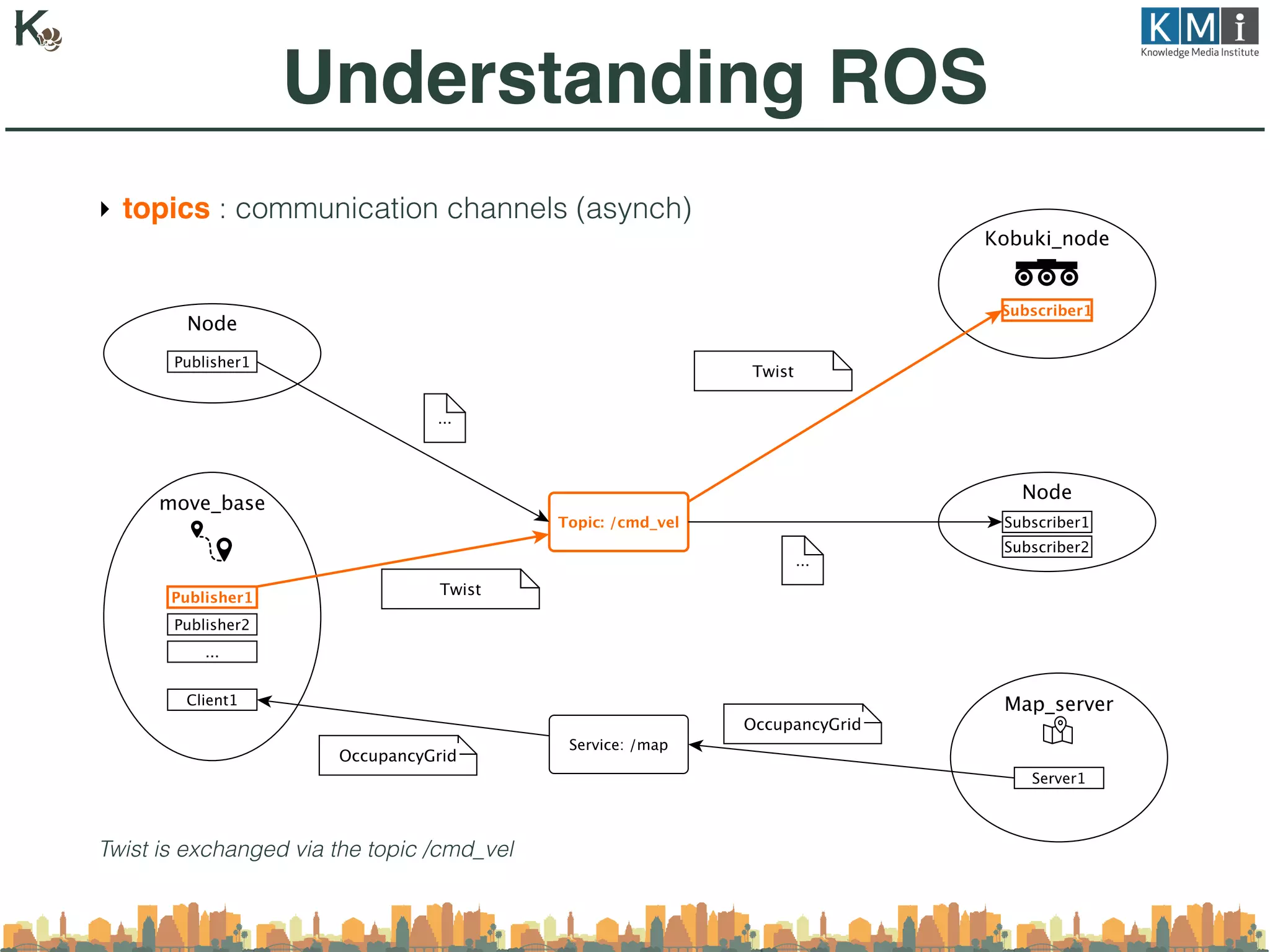
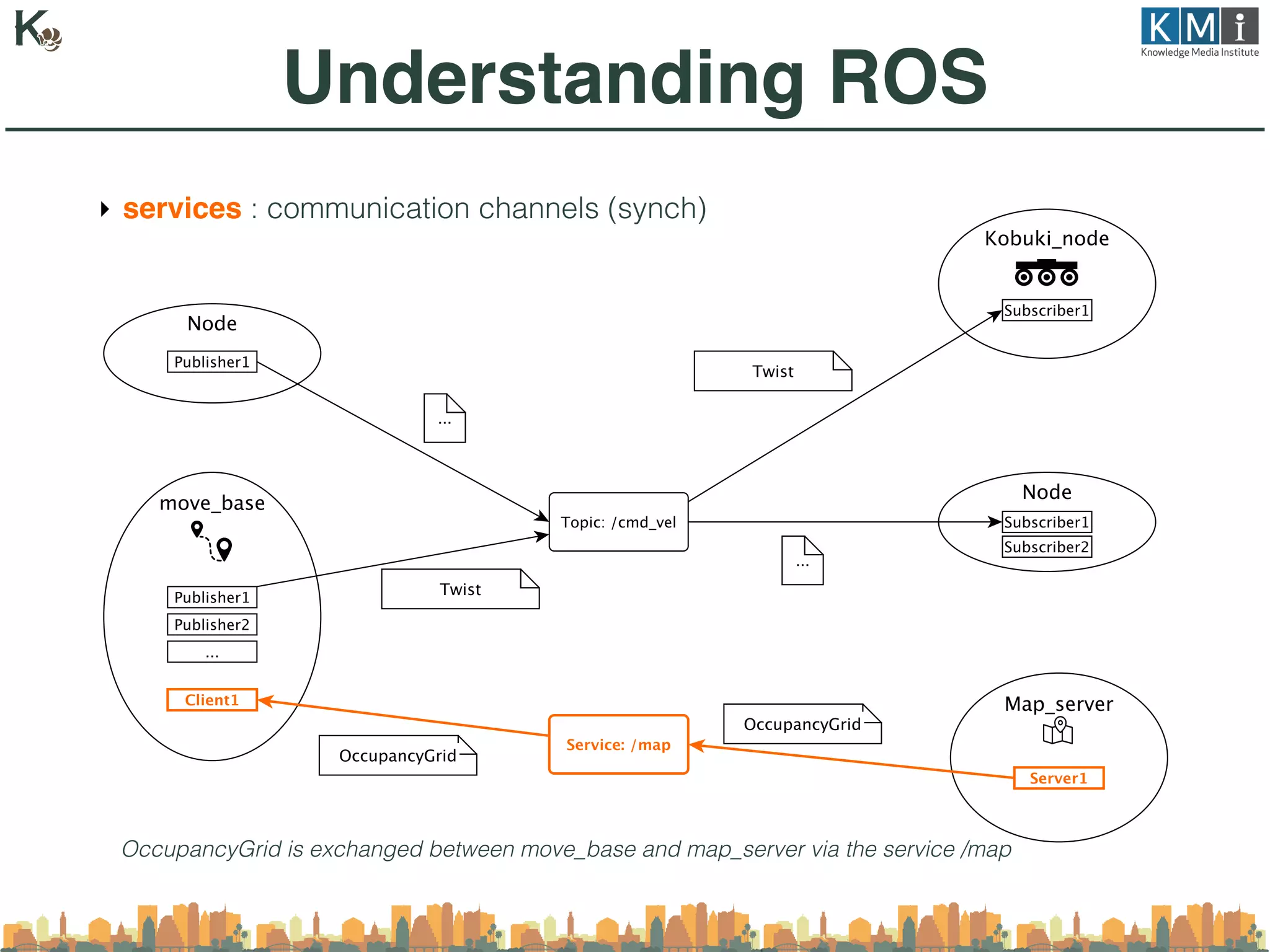
![[2] : the Robot Operating System
‣ collaborative middleware
‣ management of low-level components (share, reuse)
‣ need a fine-grained understanding of the robot architecture
Robot Operating System
[2] www.ros.org](https://image.slidesharecdn.com/2017kcap-171205223537/75/An-ontology-based-approach-to-improve-the-accessibility-of-ROS-based-robotic-systems-6-2048.jpg)
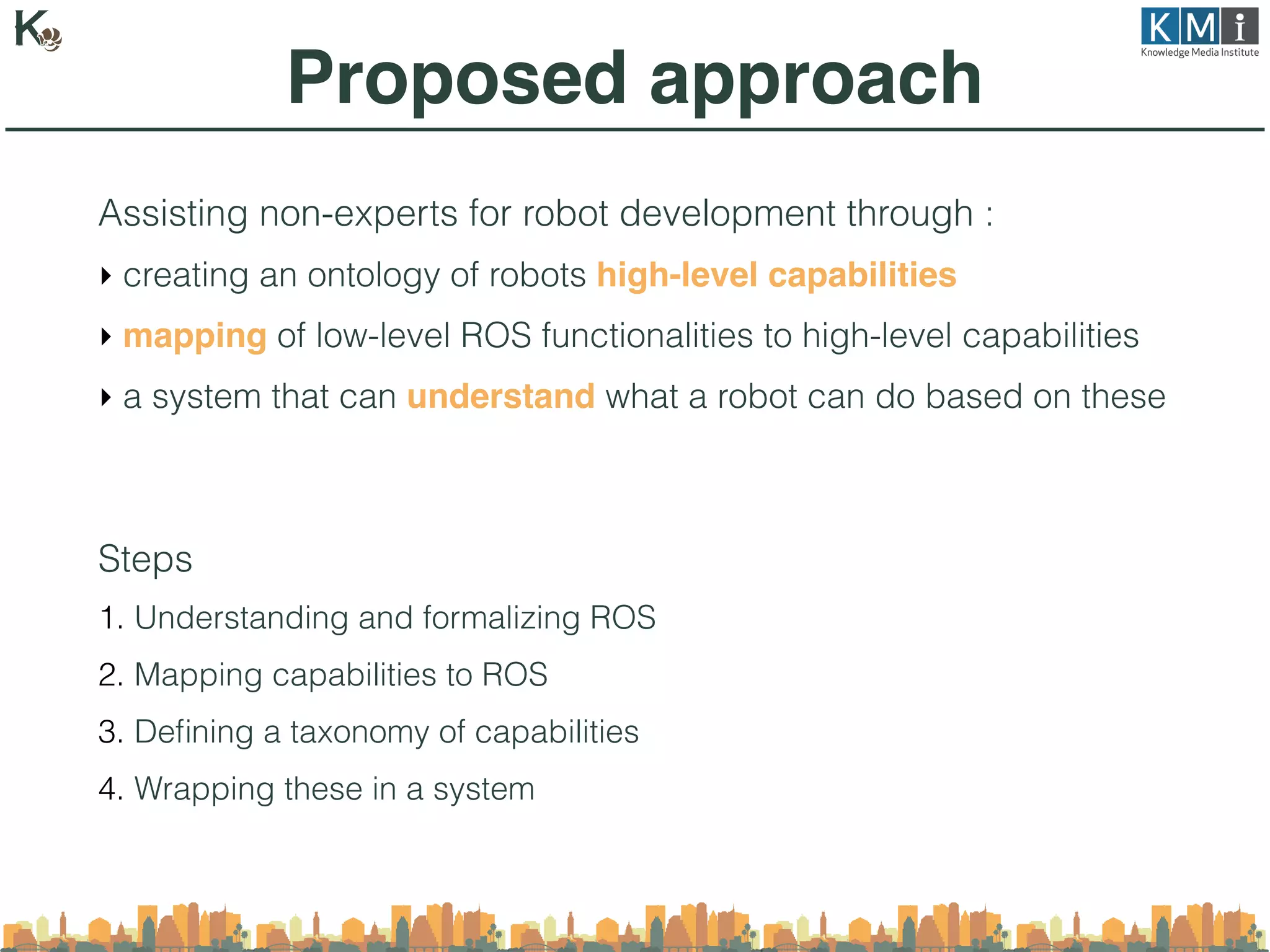
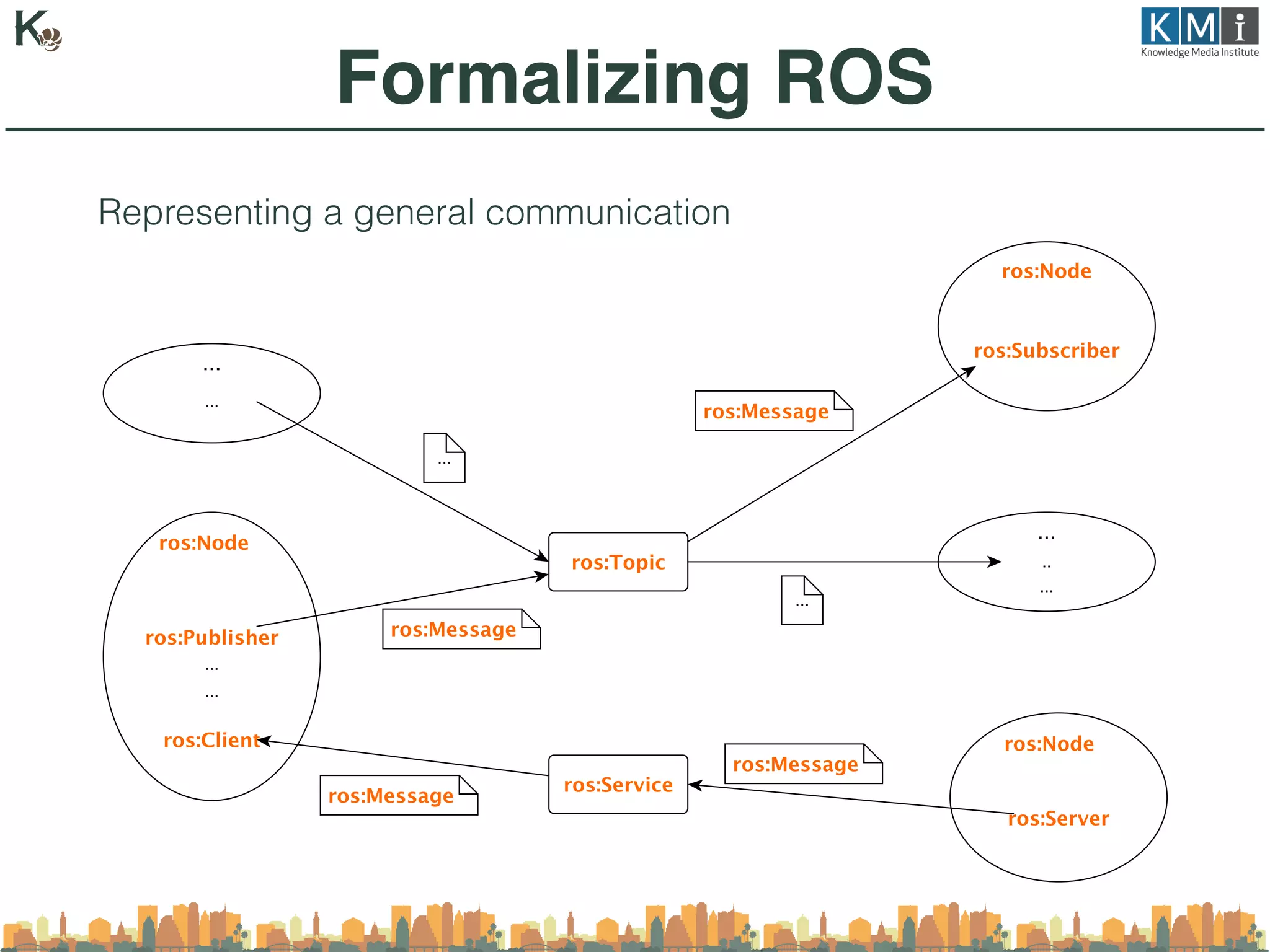
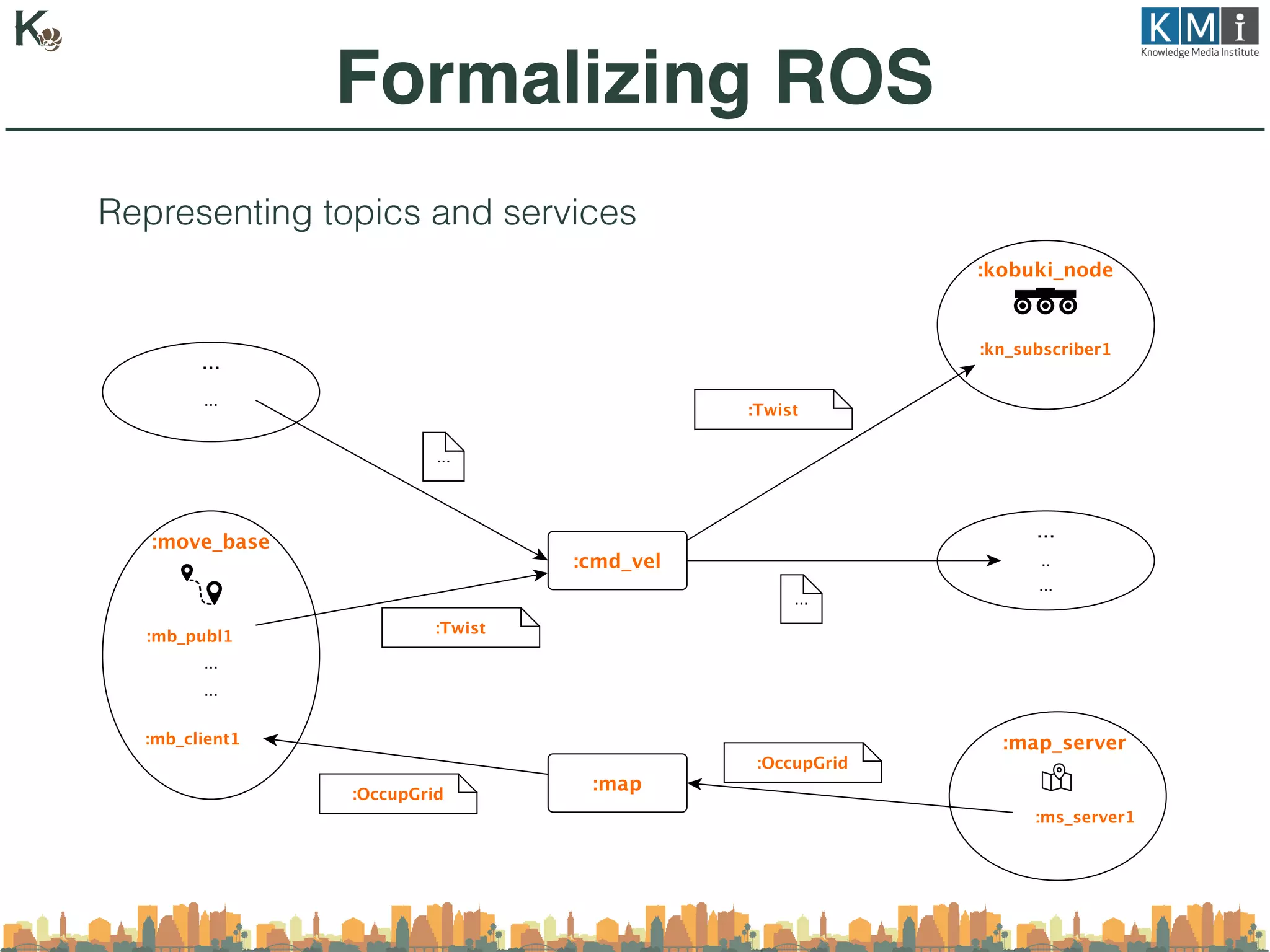
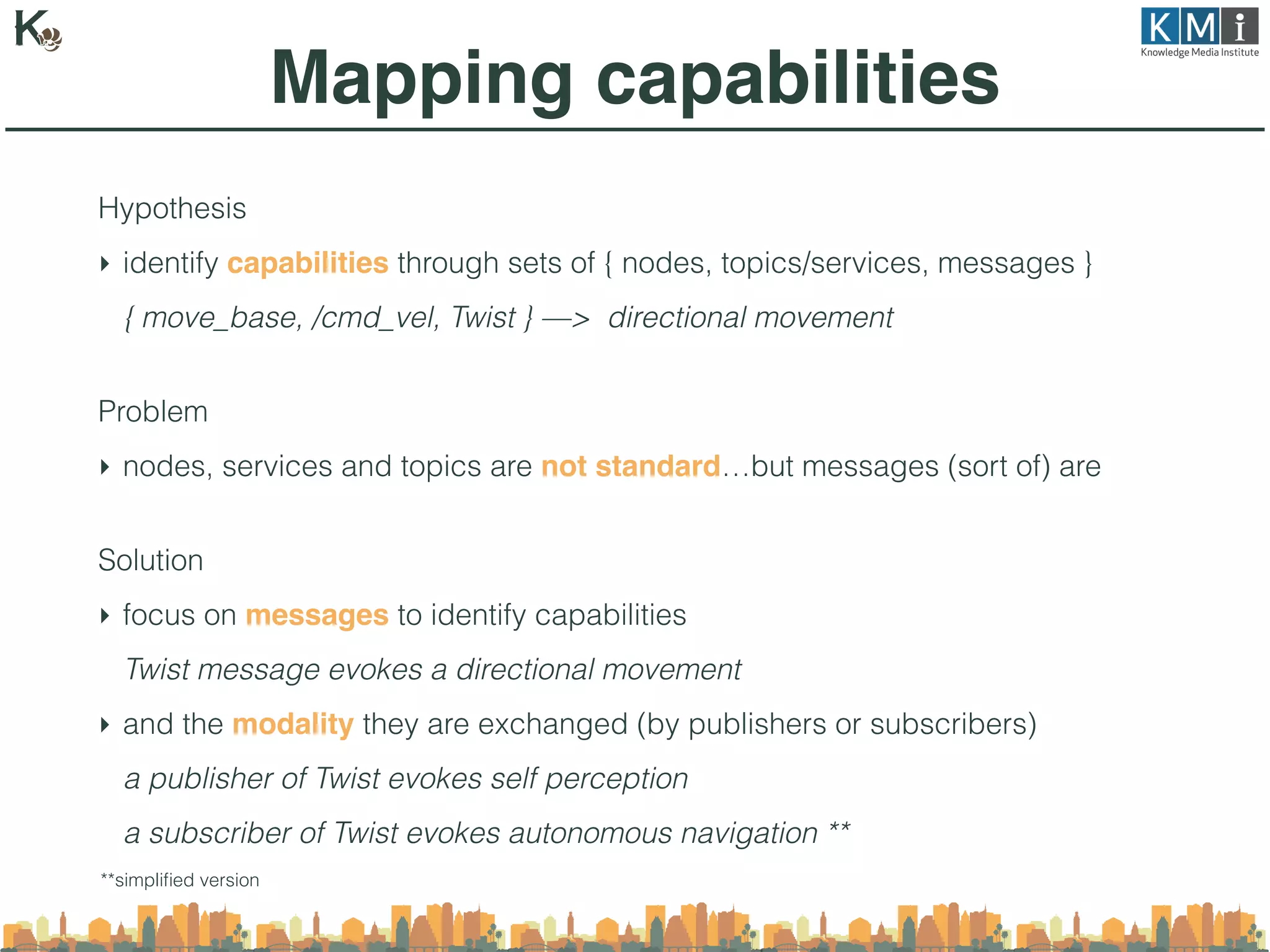
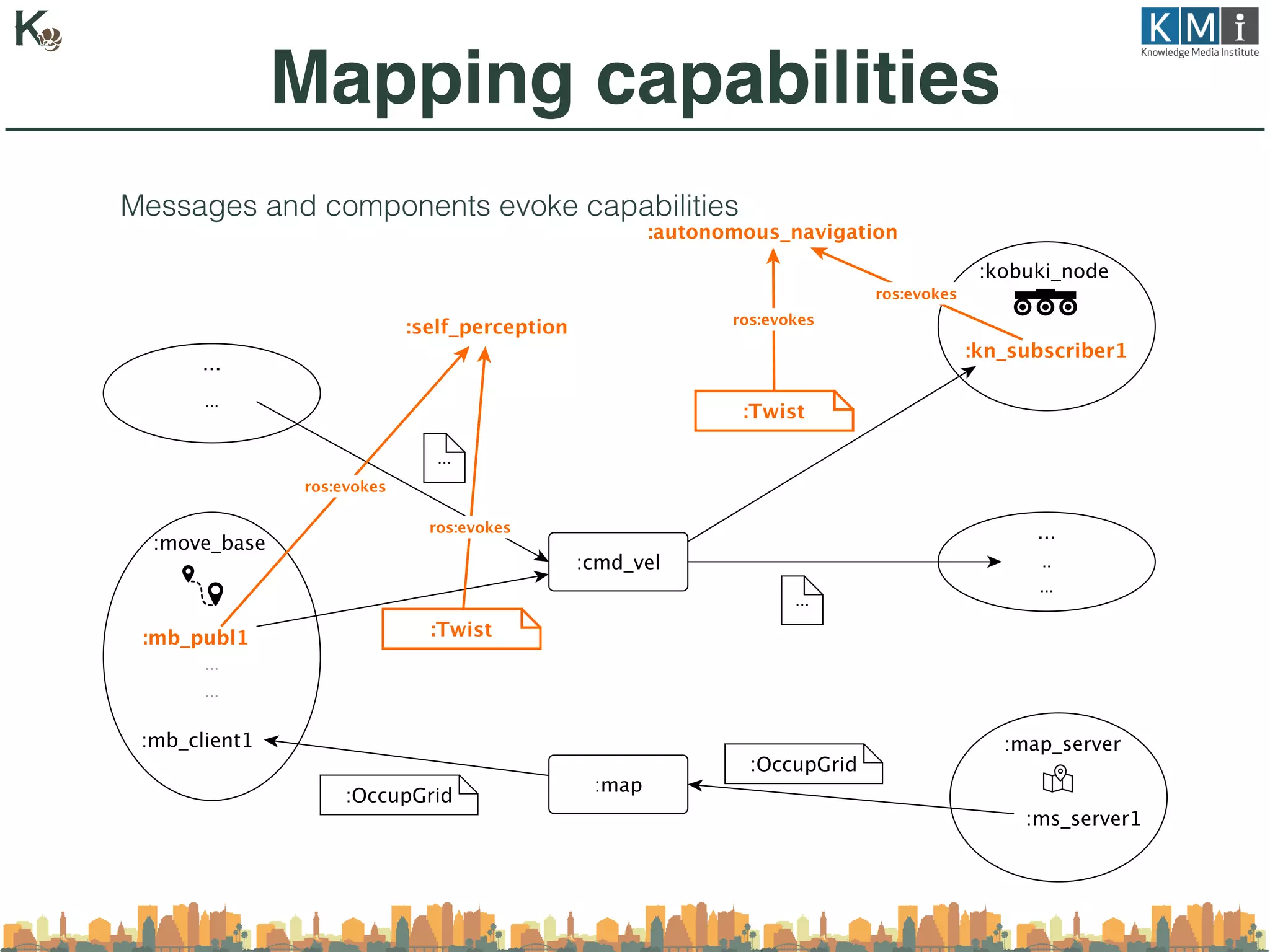
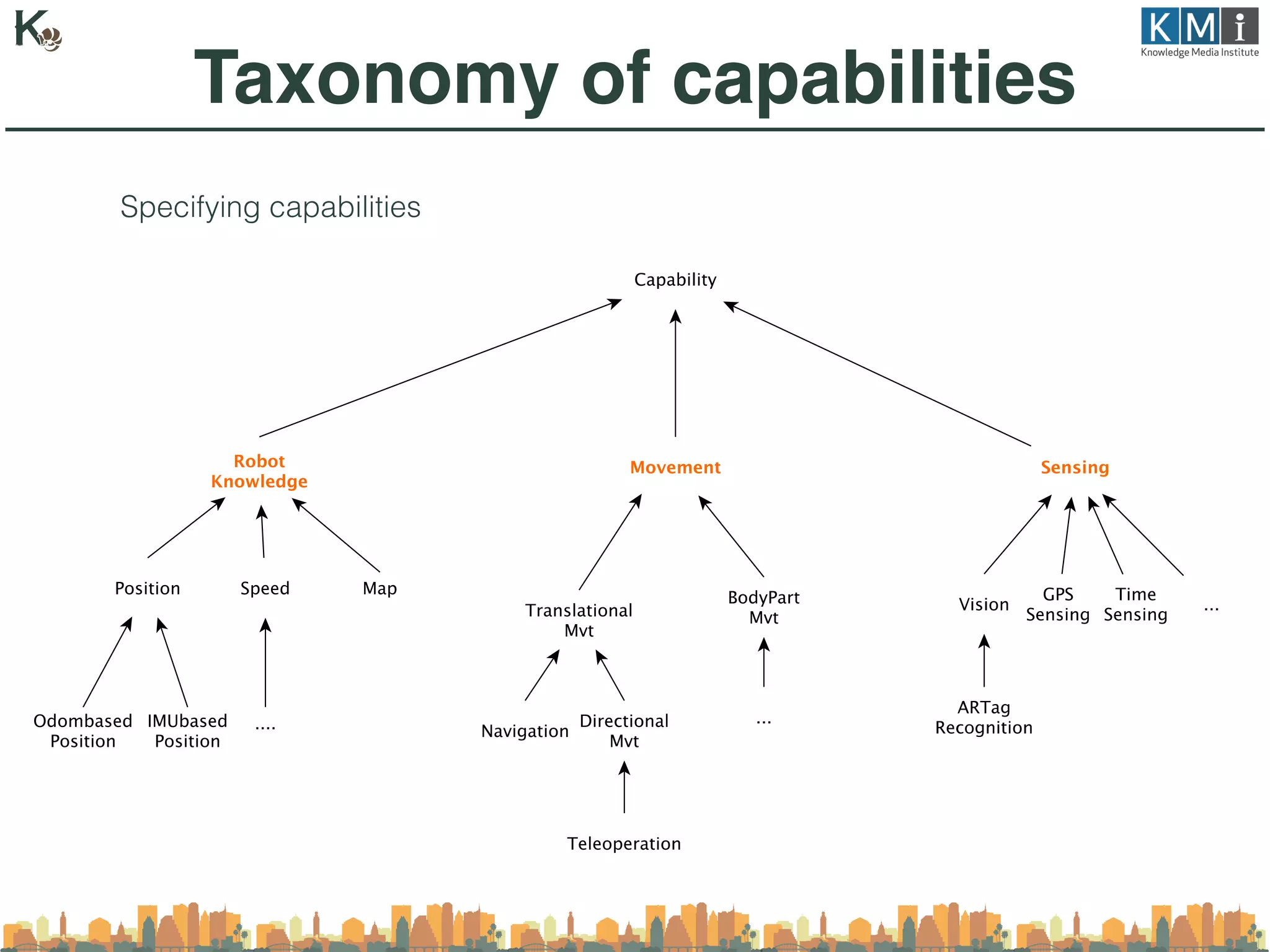
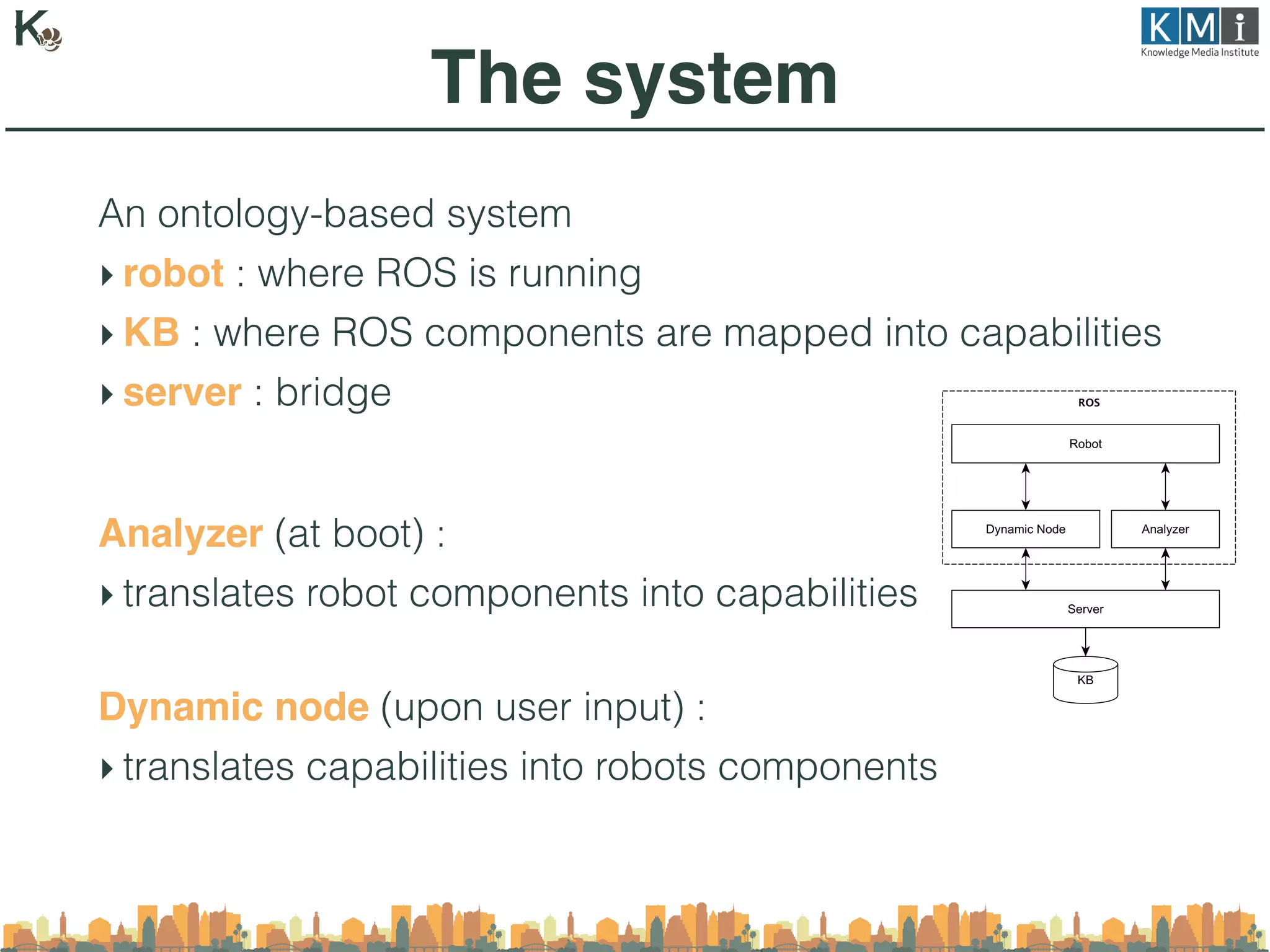


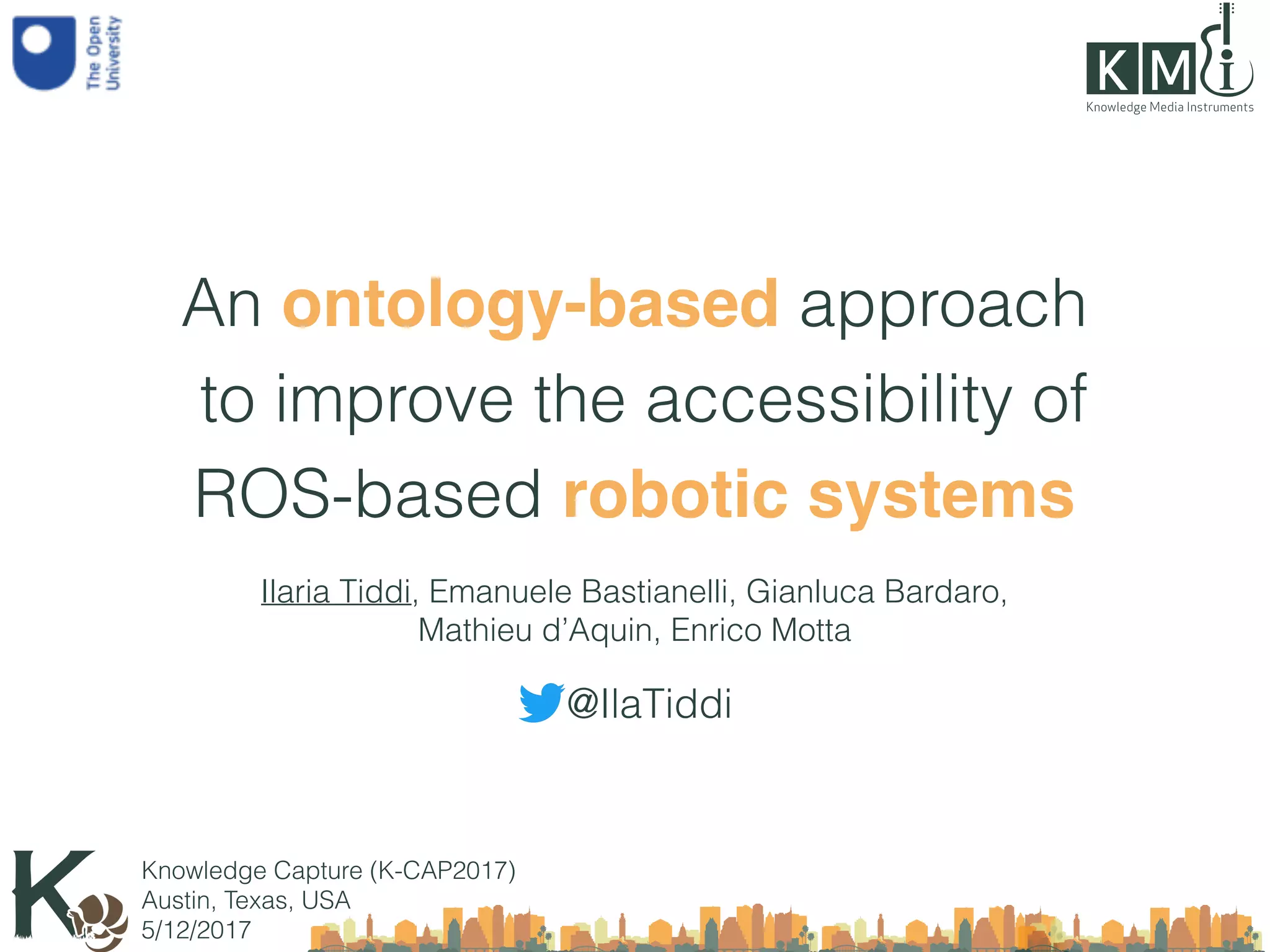
This document discusses an ontology-based approach to enhance the accessibility of robotic systems utilizing the Robot Operating System (ROS). It highlights the need for non-experts to understand and use robot capabilities without deep knowledge of the underlying technology, proposing a system that maps high-level functionalities to low-level ROS components. Future work includes refining the capability taxonomy and expanding the system to support additional robotic functions.



















![Blue_Futuristic_Technology_Presentation_(3)[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/bluefuturistictechnologypresentation31-250520171656-4912de65-thumbnail.jpg?width=640&height=640&fit=bounds)