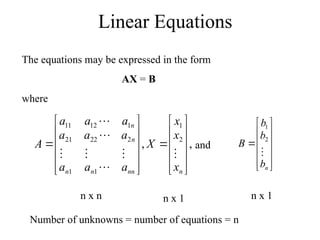
The document provides an introduction to matrices, including their definitions, properties, and various operations such as addition, subtraction, and multiplication. It discusses matrix dimensions, the use of determinants for matrix inversion, and the concepts of minors and cofactors. Additionally, it explains the importance of matrices in solving linear equations, particularly in the context of survey problems.
![Matrices - Introduction
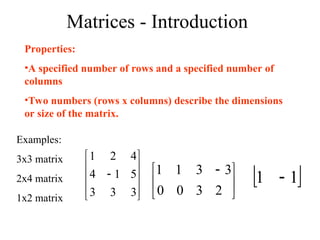
A matrix is denoted by a bold capital letter and the elements
within the matrix are denoted by lower case letters
e.g. matrix [A] with elements aij
mn
ij
m
m
n
ij
in
ij
a
a
a
a
a
a
a
a
a
a
a
a
2
1
2
22
21
12
11
...
...
i goes from 1 to m
j goes from 1 to n
Amxn=
mAn](https://image.slidesharecdn.com/alliedmathematics-iunitiiimatrices-240830055151-d18f82cd/85/ALLIED-MATHEMATICS-I-UNIT-III-MATRICES-ppt-4-320.jpg)
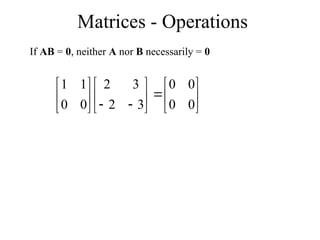
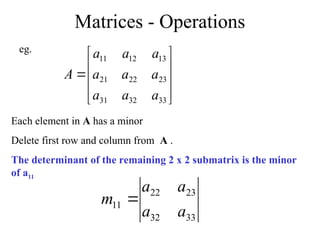
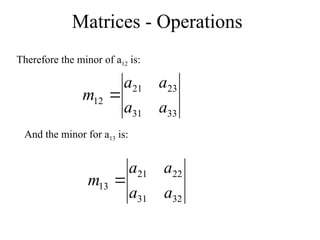
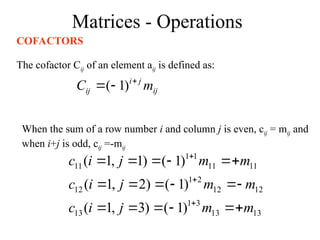
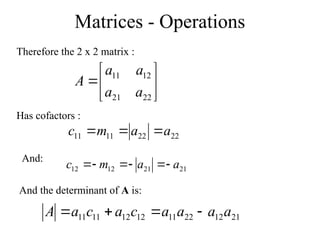
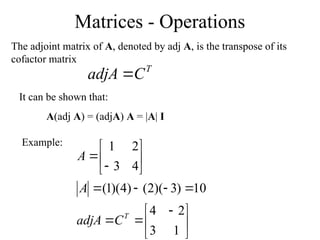
![Matrices - Operations
If A = [A] is a single element (1x1), then the determinant is
defined as the value of the element
Then |A| =det A = a11
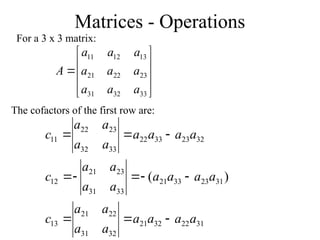
If A is (n x n), its determinant may be defined in terms of order
(n-1) or less.](https://image.slidesharecdn.com/alliedmathematics-iunitiiimatrices-240830055151-d18f82cd/85/ALLIED-MATHEMATICS-I-UNIT-III-MATRICES-ppt-20-320.jpg)