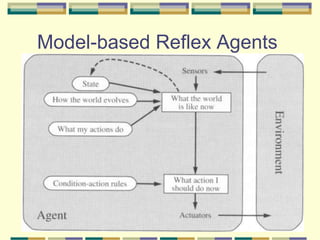
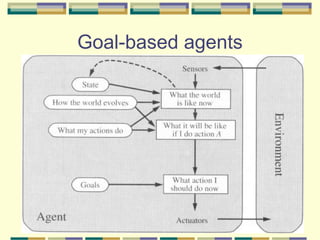
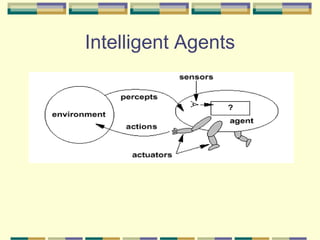
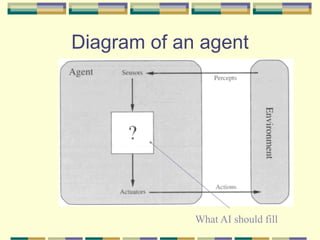
An agent is anything that perceives its environment through sensors and acts upon the environment through actuators. Intelligent agents can be human, robots with cameras and motors, or thermostats detecting room temperature. An agent's behavior is described by its agent function, which maps percept sequences to actions. Rational agents select actions expected to maximize a performance measure given the agent's knowledge and percept sequence. Learning agents can improve their performance over time by experiencing examples.
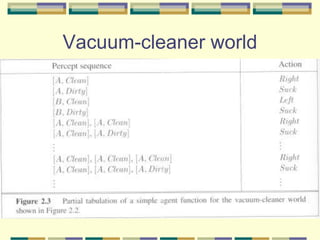
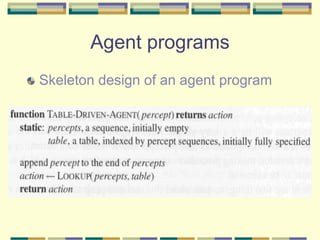
![Program implements the agent
function tabulated in Fig. 2.3
Function Reflex-Vacuum-Agent([location,status])
return an action
If status = Dirty then return Suck
else if location = A then return Right
else if location = B then return left](https://image.slidesharecdn.com/aich2-230806170620-8bd3778f/85/AI_Ch2-pptx-9-320.jpg)