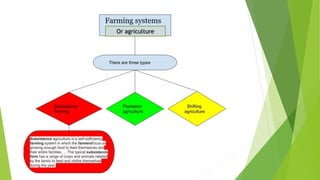
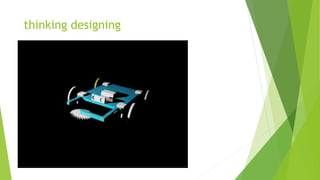
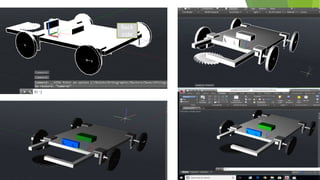
This document describes an agriculture bot created by students Patel Sanket and Sevak Nevil. The agriculture bot is a robot designed to automatically complete agriculture-related tasks like cutting plants. It discusses the components used to build the bot, including an Arduino microcontroller, DC motors, ultrasonic sensors, and a motor shield. It also provides background on agriculture revolutions and explains the design process, from conceptualizing the bot to selecting parts, programming, and creating a mobile app for control. The goal of the agriculture bot is to help reduce the effort for subsistence farmers compared to traditional manual methods.