Download to read offline
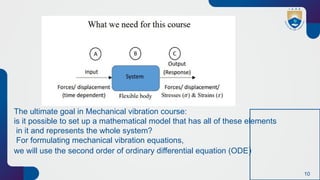
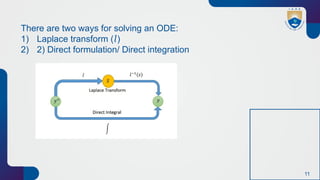
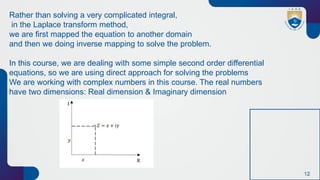

The document presents an introduction to aerospace structural dynamics and outcome-based education, with a focus on single-degree-of-freedom linear systems and mechanical vibration theories. It emphasizes the significance of understanding system behavior under time-dependent forces and discusses the applications of ordinary differential equations for modeling these vibrations. Key concepts include mass, elasticity, energy absorption, and the different types of motions and vibrations, such as free and forced vibrations.



































































