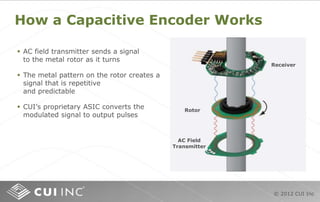
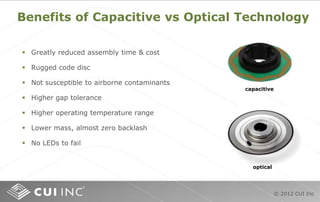
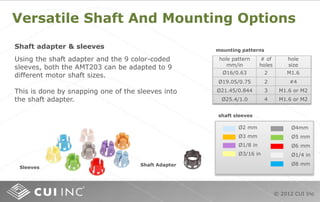
This document provides a training module on rotary absolute encoders, specifically the AMT203 absolute encoder produced by CUI Inc. It describes the functional theory of encoders, the benefits of absolute encoders over incremental encoders, and the key components and features of the AMT203 including its capacitive sensing technology, flexible shaft and mounting options, serial interface, and purchasing options. The training objectives are to familiarize the reader with encoder technology and highlight the capabilities and advantages of CUI's AMT203 absolute encoder.