This document is an assignment for a control system design course. It contains questions regarding the modeling and analysis of a motor system using Laplace transforms. Specifically, it asks the student to:
1) Derive the transfer function for the motor system.
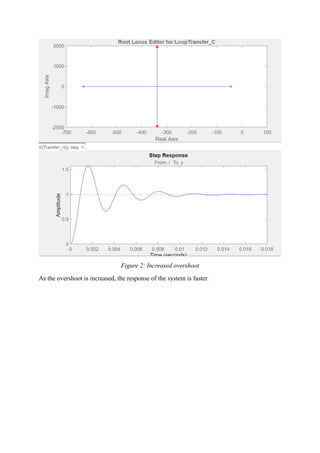
2) Sketch the root locus and Bode plot.
3) Justify whether a damping factor or overshoot system would be preferred for motor speed control and why.
4) Use MATLAB/Simulink to verify the answers.
![question I
Ta(s)=
Kaia (s) -
D
Tr(s)
=
JmsPOCs) + Bm8(s)
=
T
a(s) -
T.(S)
Sms0(s) +
BmsO(s) =
Ta(s) -
B
Va(s) =
iaRa(s) +
LaSia(s) +
Ua(s) -
Ua(s) =
VaS8(s) -
Compare D and D
kaia(s)
=
JmsOCs) +
BmS8(s)
ia(s) =
CmSOCs) +
BmsO(s) -
B
Ka
Uq(s) =
(Ra+LaS)
i
q(s) +
Up(s) -
equation & rewritten
Sub in
equation &
and I
"a(S) =
(RatLaSS
(ImsItBms)
8cs) +
Ras
Ua(s) =
(PatLas)(Ims'+BmS] ha-
b(s)
ha
Let
0 (s) =
Wr(S)
Macha - sub values
(a+LaS)(3ms+
BmS)+ kaz
Ua() =
0.105
W.Cs)(2.7+0.004s)(0000s+00000093) +
(0.10))2
0.185
=
(4x(-7)5 +
(2.7x10-4)s +
0.011025](https://image.slidesharecdn.com/a174738assignment2-231009091337-ee923b9d/85/A174738-Assignment-2-pdf-2-320.jpg)