Download to read offline
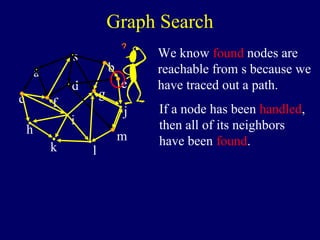
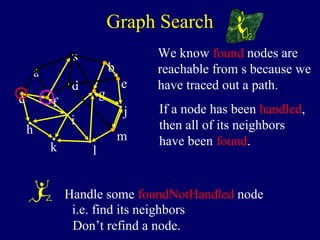
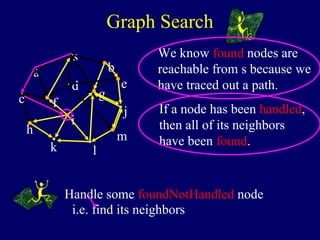
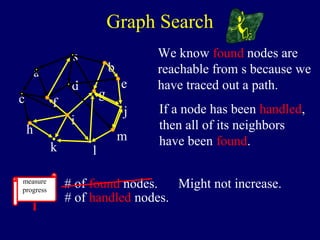
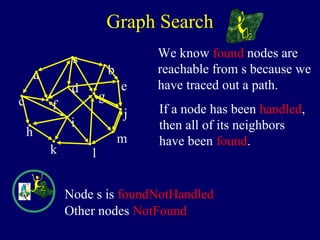
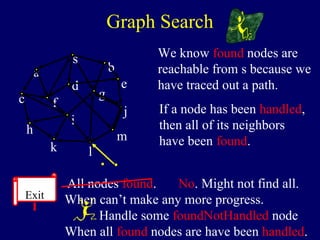
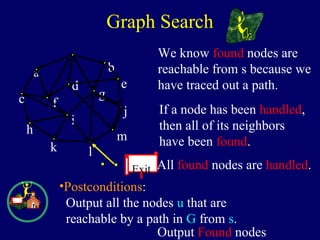
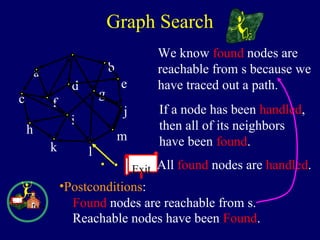
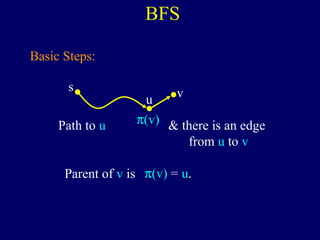
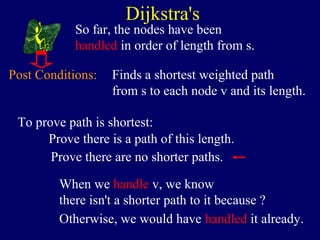
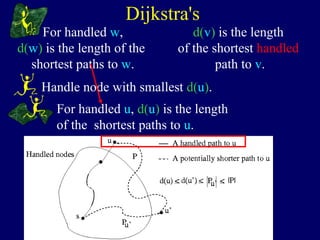
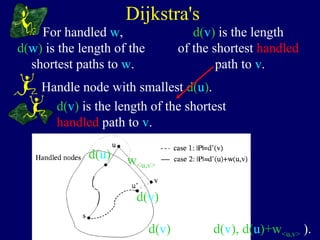
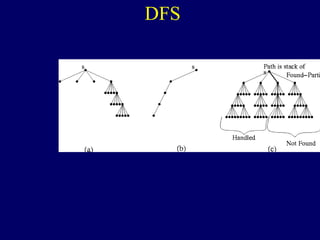
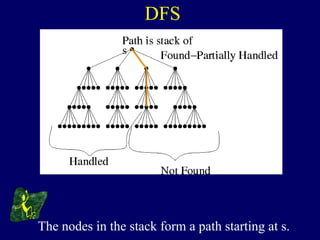
![We know found nodes are
reachable from s because we
have traced out a path.
If a node has been handled,
then all of its neighbors
have been found.
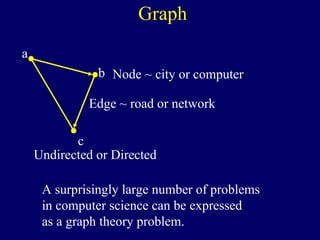
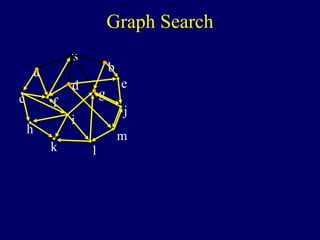
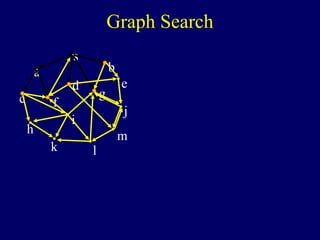
Graph Search
Exit
a
c
h
k
f
i
m
j
e
b
g
d
l
All found nodes are handled.
Exit Reachable nodes have been Found.
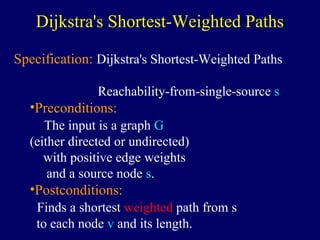
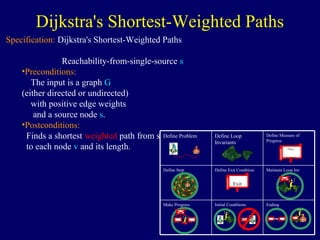
•Postconditions:
found = handled
handled
Notfound
[A ⇒ B] = [¬B ⇒ ¬A]
NotFound nodes not reachable.](https://image.slidesharecdn.com/5-searching-140325165958-phpapp02/85/5-searching-19-320.jpg)
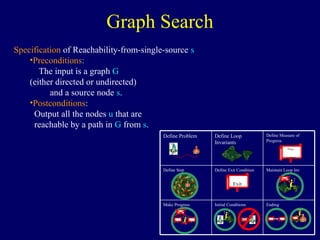
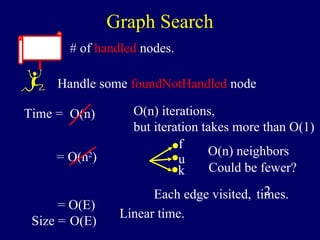
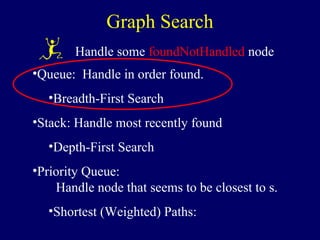
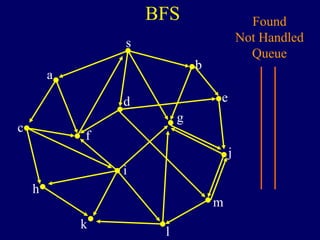
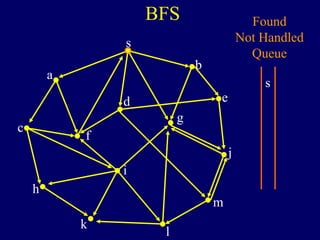
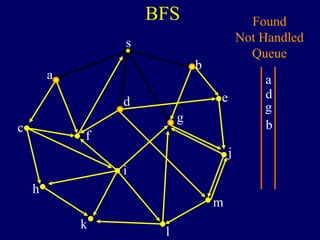
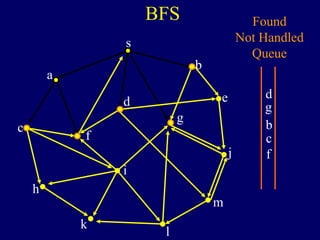
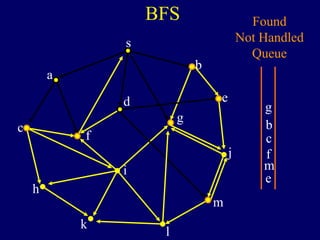
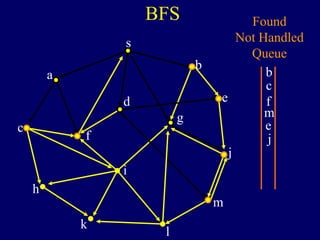
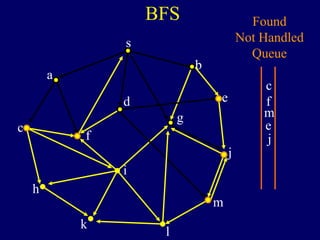
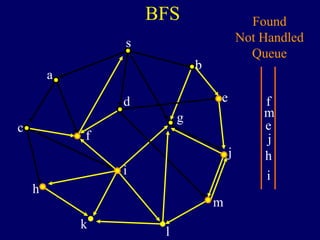
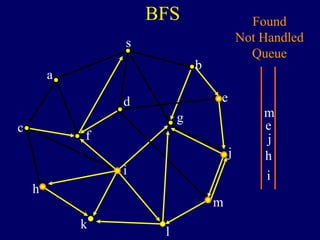
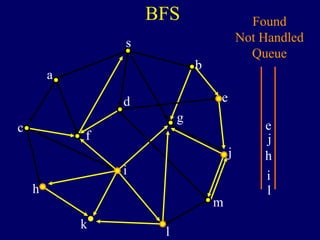
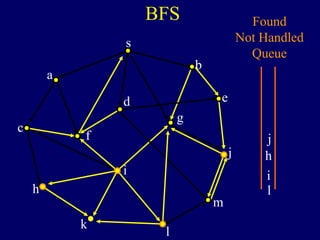
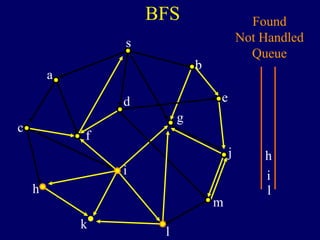
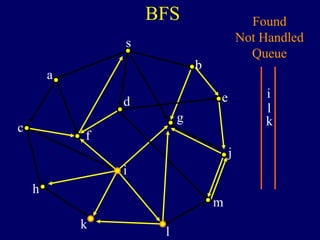
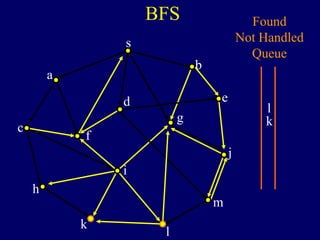
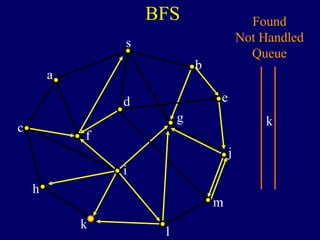
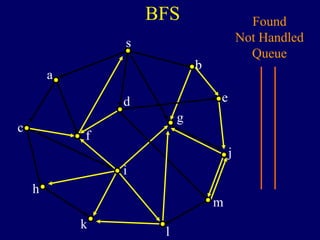
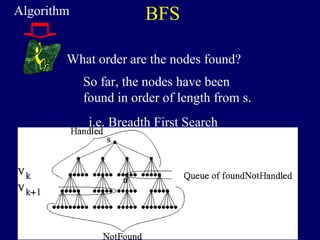
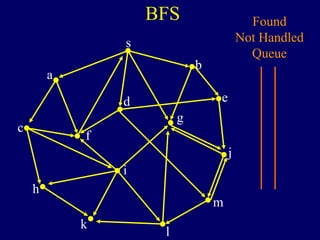
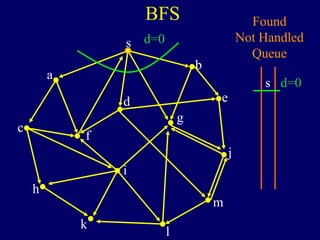
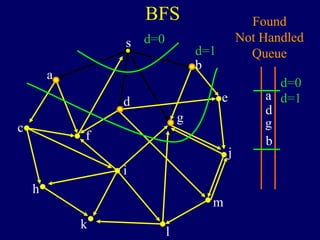
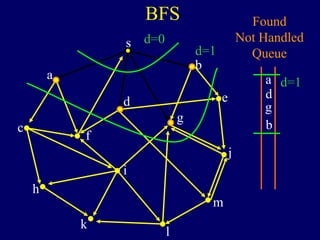
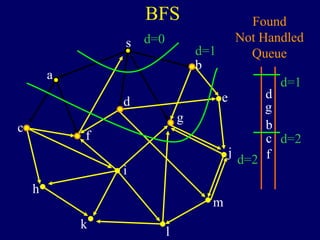
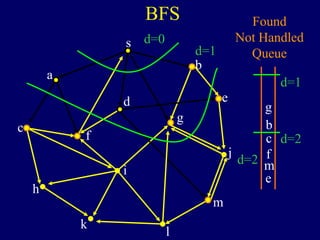
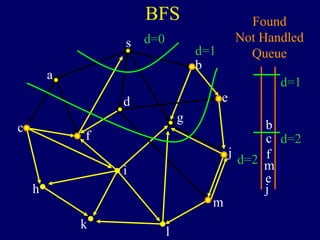
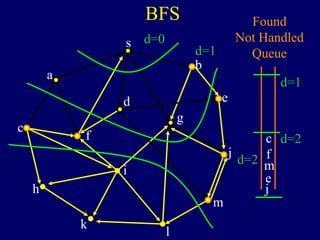
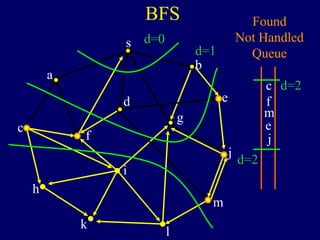
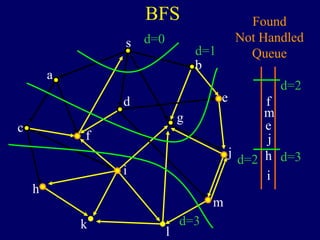
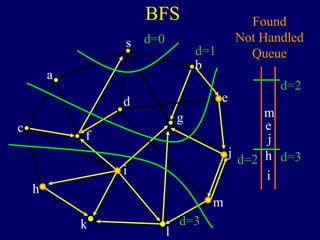
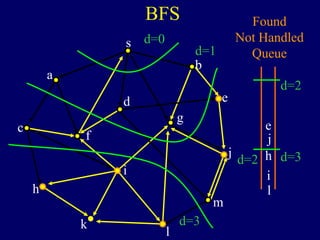
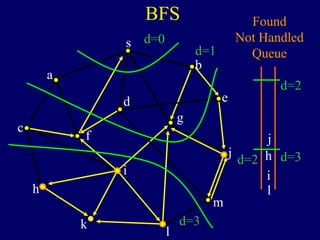
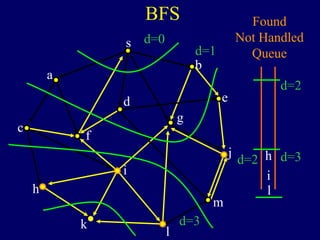
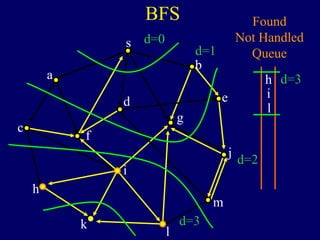
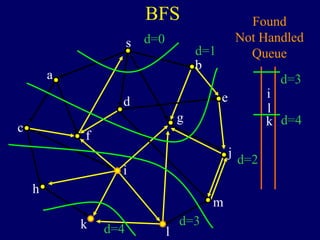
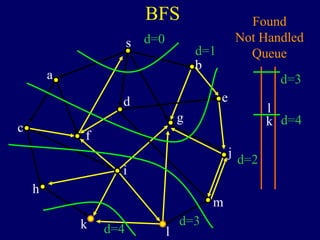
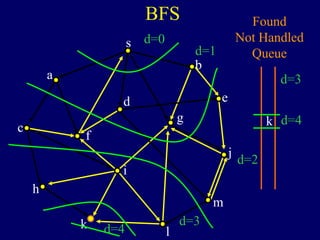
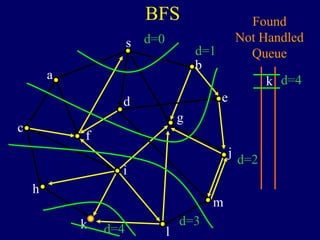
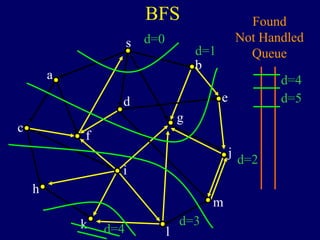
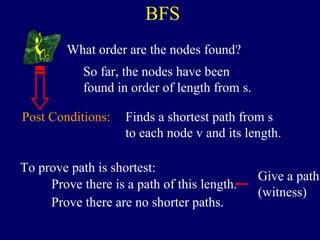
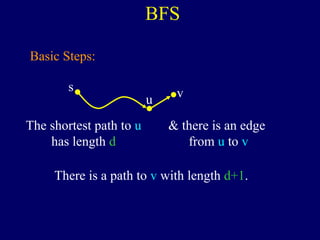
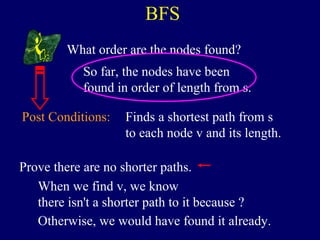
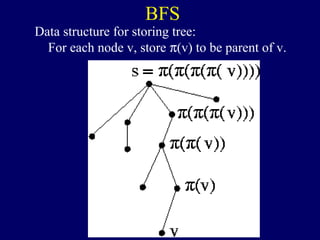

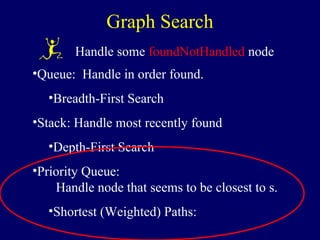
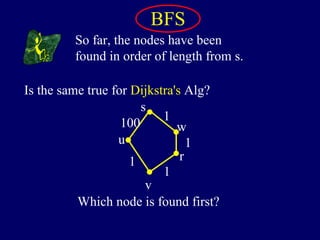
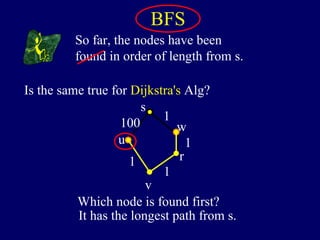
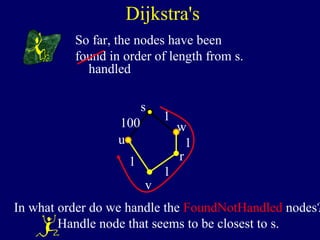
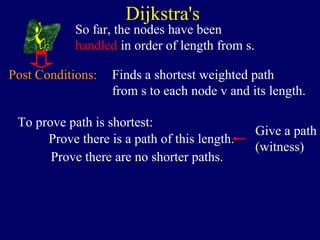

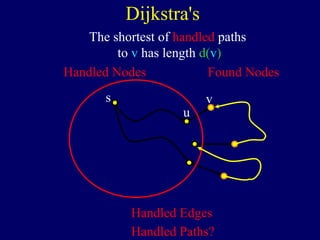
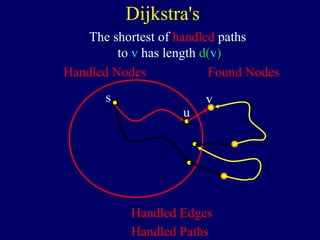
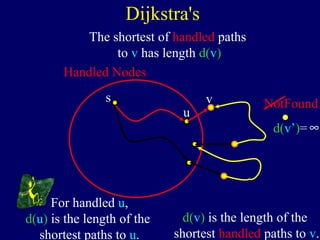
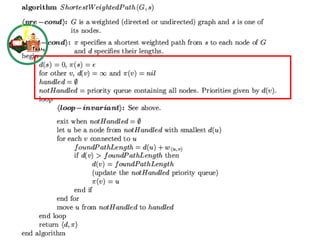
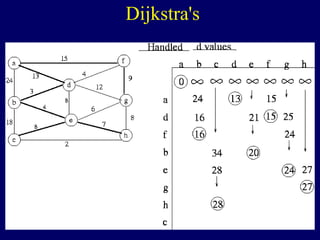
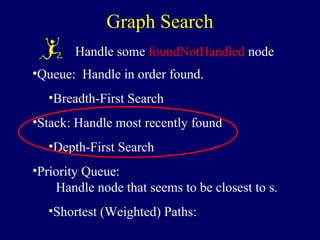
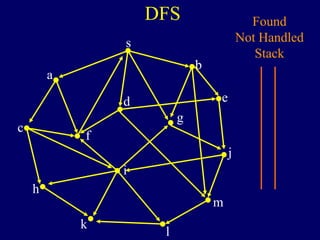
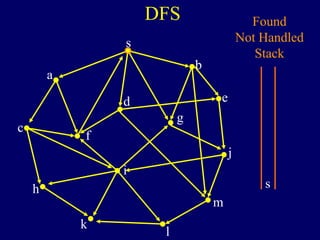
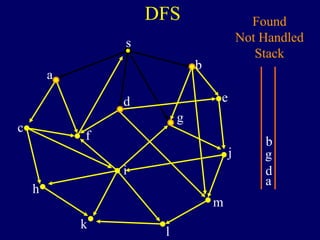
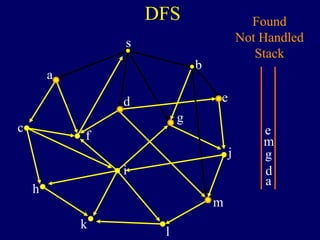
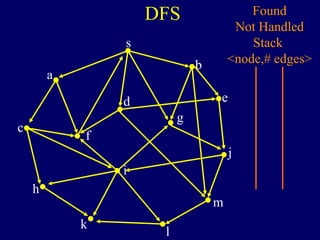
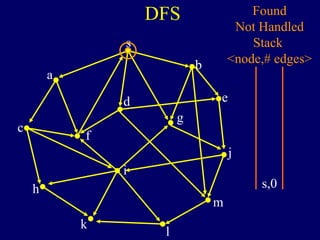
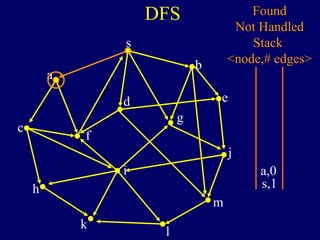
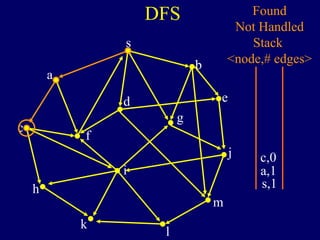
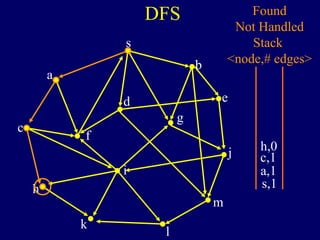
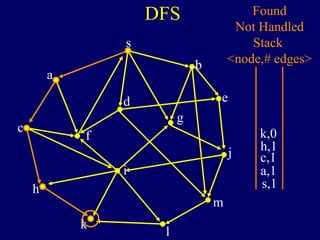
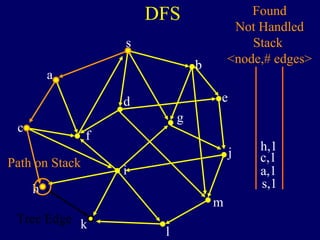
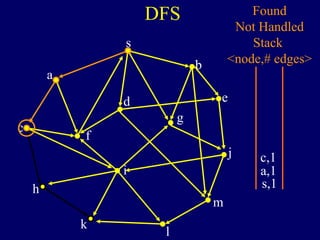
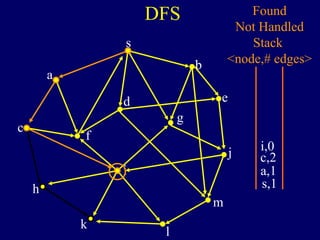
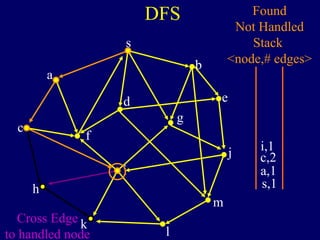
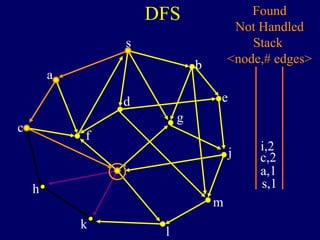
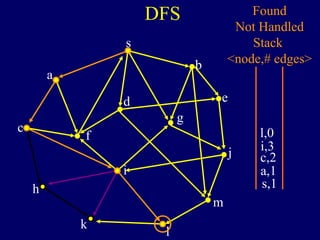
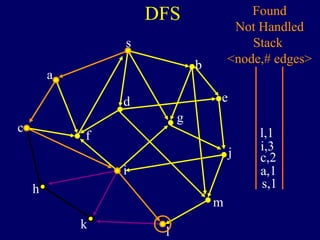
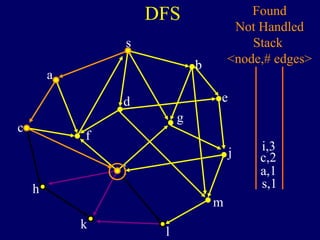
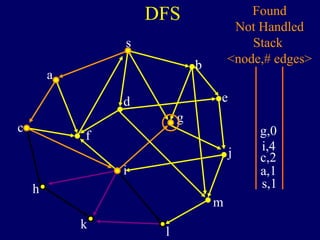
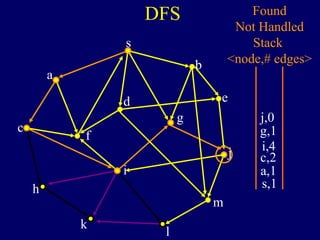
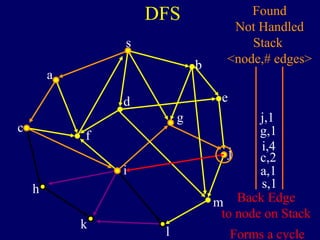
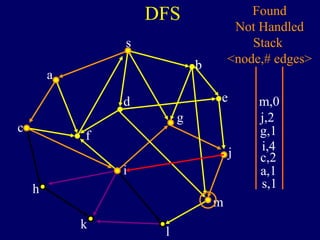
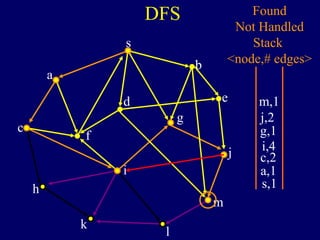
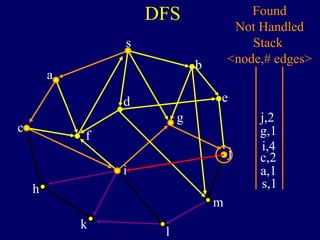
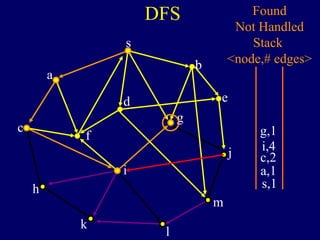
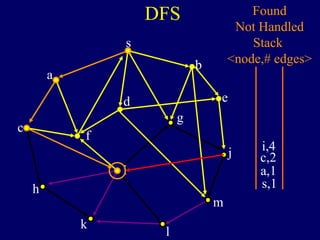
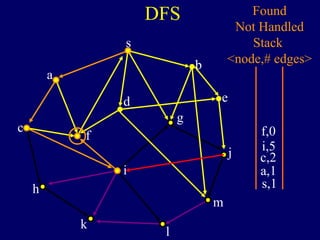
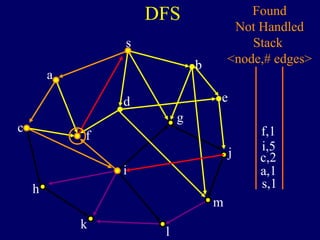
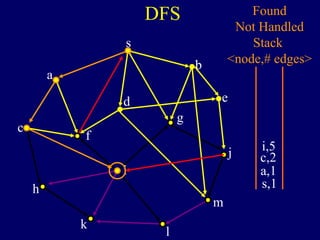
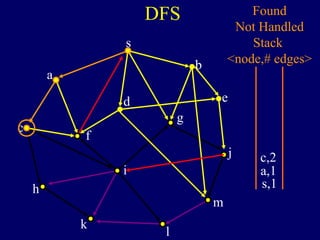
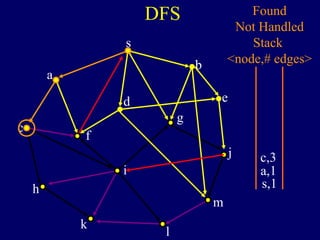
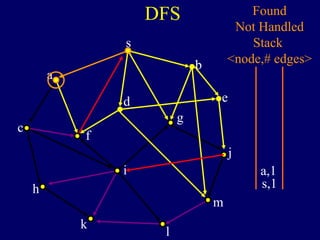
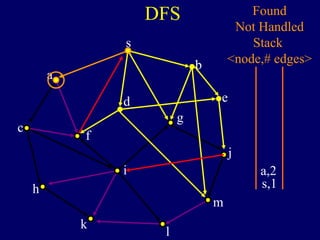
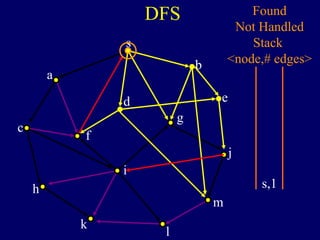
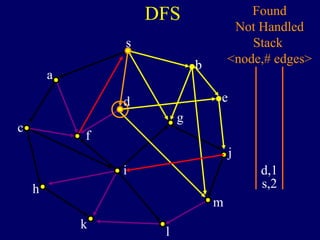
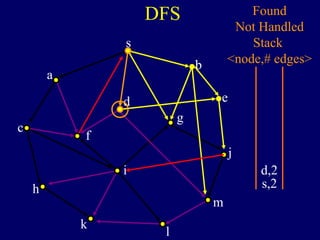
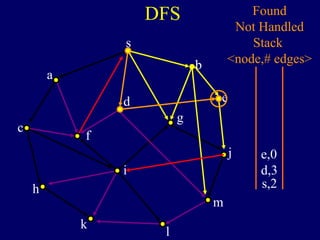
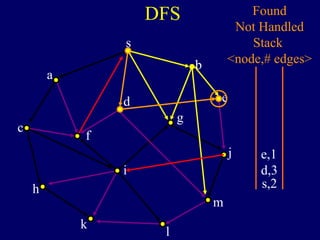
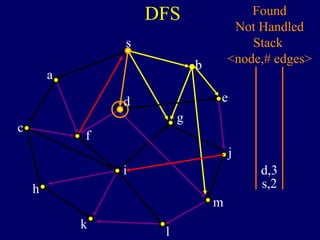
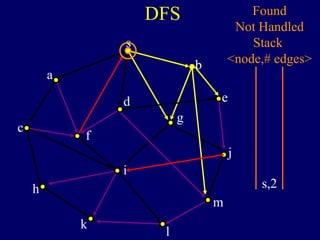
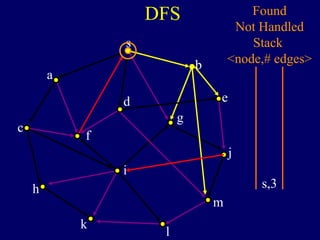
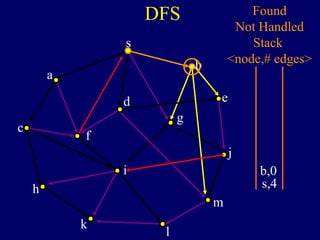
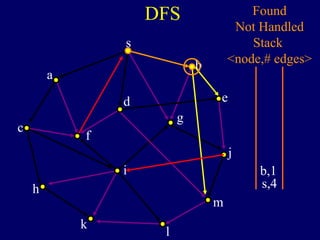
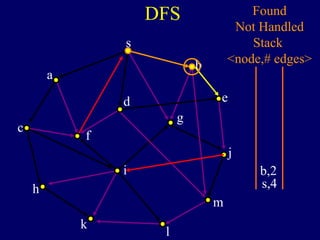
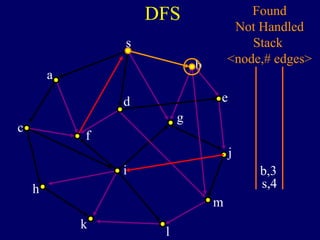
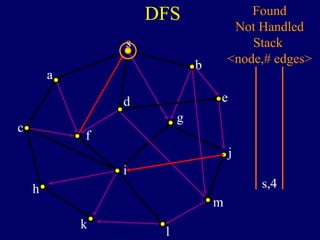
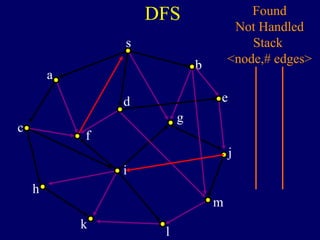

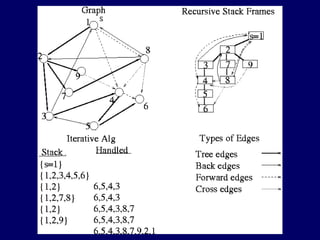

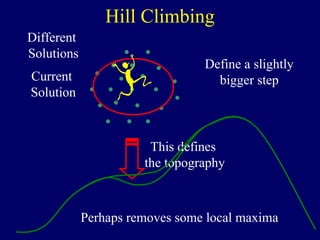
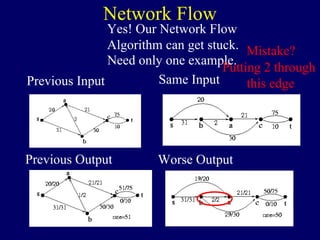
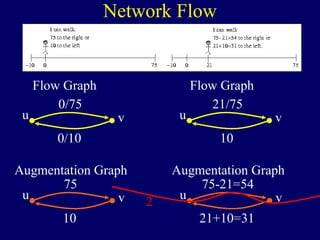
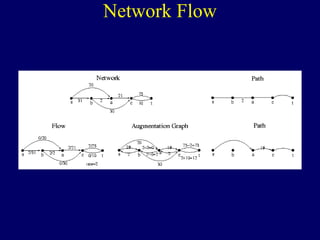
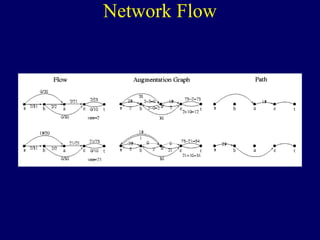
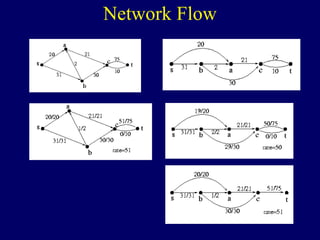

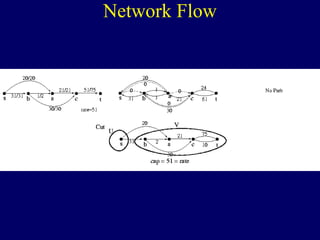

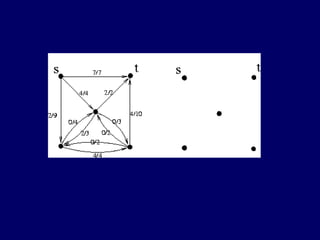


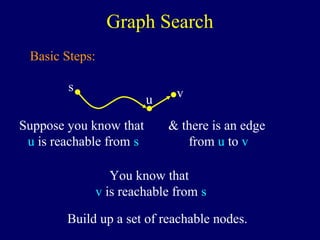
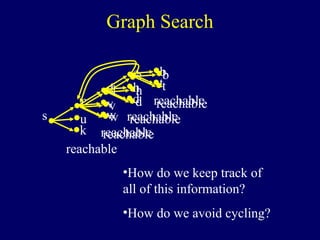
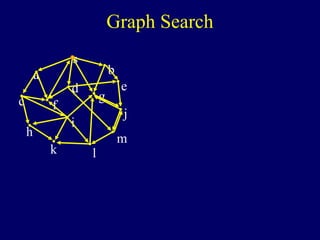
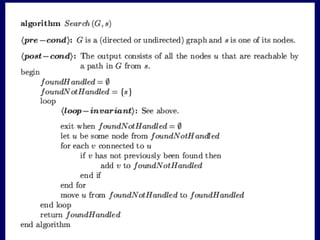
The document discusses graph search algorithms. It begins by defining the problem of finding all nodes reachable from a single source node s in a graph G. It then outlines the basic steps of a graph search: (1) start with the known reachable nodes as just s; (2) repeatedly find neighbors of known reachable nodes and add them as new reachable nodes; (3) terminate when no more progress can be made. It then describes breadth-first search (BFS) in detail, showing how BFS finds nodes in order of distance from s by maintaining a queue of found nodes not yet handled. At each step, BFS handles the next node in the queue, finds its neighbors, and adds them to the found