More Related Content

PDF

PDF

PDF

PDF

PDF

PDF

PDF

PDF
はじめてのパターン認識 第5章 k最近傍法(k_nn法) What's hot

ZIP

PDF

PDF

PDF

PDF
Sliced Wasserstein Distance for Learning Gaussian Mixture Models 
PDF

PDF

PDF

PPTX
Swin Transformer (ICCV'21 Best Paper) を完璧に理解する資料 ![[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018)](https://cdn.slidesharecdn.com/ss_thumbnails/201807263dv-180728060959-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
[第2回3D勉強会 研究紹介] Neural 3D Mesh Renderer (CVPR 2018) 
PPTX

PDF
パターン認識と機械学習 §6.2 カーネル関数の構成 
PDF

PDF

PDF

PDF
ICLR2020の異常検知論文の紹介 (2019/11/23) 
PPTX

PDF
Sparse Codingをなるべく数式を使わず理解する(PCAやICAとの関係) 
PPTX

PPTX
勾配ブースティングの基礎と最新の動向 (MIRU2020 Tutorial) Similar to わかりやすいパターン認識_3章

PDF

PDF

PPTX

PDF
PRML 4.1 Discriminant Function 
PDF

PDF
オンライン凸最適化と線形識別モデル学習の最前線_IBIS2011 
PPTX

PDF
PATTERN RECOGNITION AND MACHINE LEARNING (1.1) 
PDF

PPTX

PPTX

PDF

PDF
PRML 5.2.1-5.3.3 ニューラルネットワークの学習 (誤差逆伝播) / Training Neural Networks (Backpropa... 
PDF

PDF

PDF

PDF

PDF

PDF

PDF
わかりやすいパターン認識_3章
- 1.
- 2.
- 3.
- 4.
- 5.
- 6.
- 7.
7
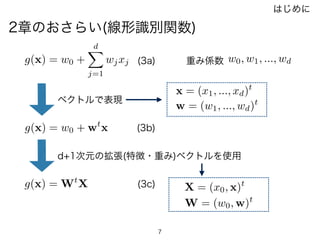
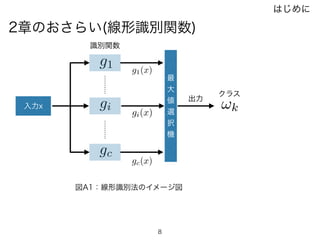
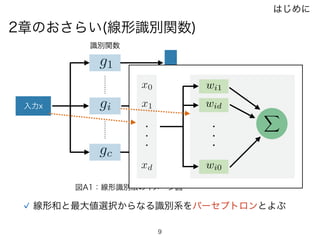
2章のおさらい(線形識別関数)
はじめに
g(x) = w0+
dX
j=1
wjxj
g(x) = w0 + wt
x
g(x) = Wt
X
w0, w1, ..., wd重み係数
ベクトルで表現
d+1次元の拡張(特徴・重み)ベクトルを使用
w = (w1, ..., wd)t
x = (x1, ..., xd)t
W = (w0, w)t
X = (x0, x)t
(3a)
(3b)
(3c)
- 8.
- 9.
- 10.
- 11.
- 12.
12
記号について
w = (w1,w2, ..., wd)t
x = (x1, x2, ..., xd)t
X = (x0, x)t
W = (w0, W)t
Xpatt = (X1, ..., Xp, ..., Xn)t
: 特徴ベクトル
: 拡張特徴ベクトル
: 重みベクトル
: 拡張重みベクトル
: パターン行列
はじめに
- 13.
- 14.
- 15.
- 16.
16
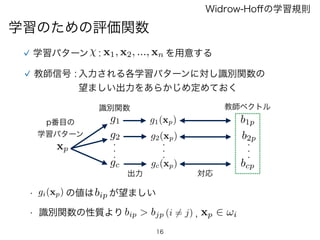
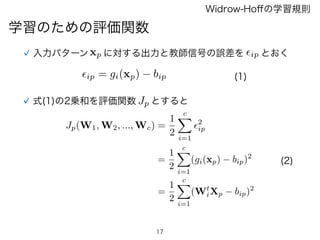
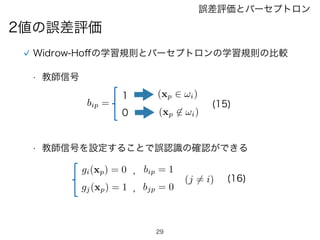
学習のための評価関数
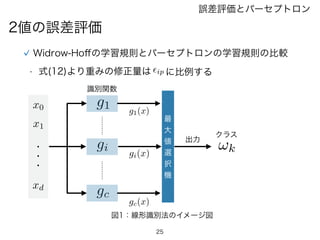
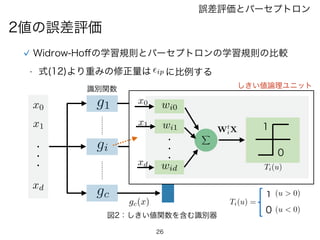
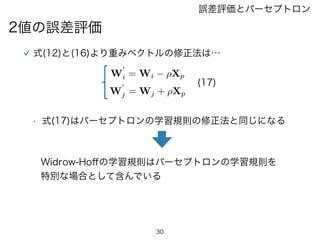
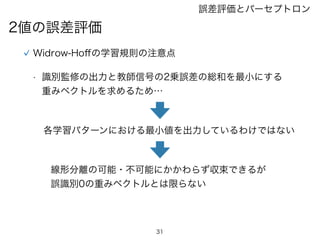
Widrow-Hoffの学習規則
学習パターン : x1,x2, ..., xn を用意する
教師信号 : 入力される各学習パターンに対し識別関数の
望ましい出力をあらかじめ定めておく
xp
g1
g2
gc gc(xp)
g2(xp)
g1(xp) b1p
b2p
bcp
p番目の
学習パターン
識別関数
・・・
・・・
・・・
教師ベクトル
対応
gi(xp) の値はbip が望ましい•
• 識別関数の性質より bip > bjp (i 6= j) xp 2 !i,
出力
- 17.
- 18.
- 19.
19
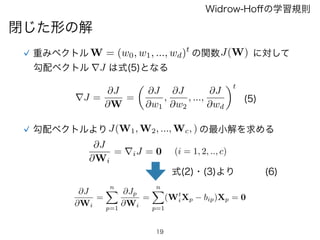
閉じた形の解
Widrow-Hoffの学習規則
重みベクトル W =(w0, w1, ..., wd)t
の関数J(W) に対して
勾配ベクトル rJ は式(5)となる
(5)rJ =
@J
@W
=
✓
@J
@w1
,
@J
@w2
, ...,
@J
@wd
◆t
勾配ベクトルよりJ(W1, W2, ..., Wc, ) の最小解を求める
@J
@Wi
= riJ = 0 (i = 1, 2, .., c)
(6)
@J
@Wi
=
nX
p=1
@Jp
@Wi
=
nX
p=1
(Wt
iXp bip)Xp = 0
式(2)・(3)より
- 20.
20
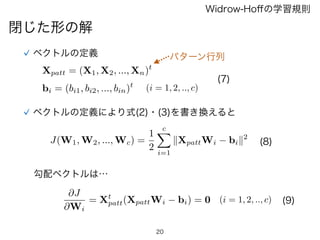
閉じた形の解
Widrow-Hoffの学習規則
ベクトルの定義
Xpatt = (X1,X2, ..., Xn)t
(i = 1, 2, .., c)bi = (bi1, bi2, ..., bin)t
(7)
ベクトルの定義により式(2)・(3)を書き換えると
J(W1, W2, ..., Wc) =
1
2
cX
i=1
kXpattWi bik2
勾配ベクトルは…
@J
@Wi
= Xt
patt(XpattWi bi) = 0 (i = 1, 2, .., c)
(8)
(9)
パターン行列
- 21.
- 22.
22
逐次近似による解
Widrow-Hoffの学習規則
閉じた形の解における問題点
• Wi はXt
pattXpatt が正則でなくては用いることができない
• 次元が大きくなると逆行列の計算が大変
代替案
• 逐次近似により重みを決定すれば良い
* 最もよく使われるのは最急降下法
W
0
i = Wi ⇢
@J
@Wi
= Wi ⇢riJ
(i = 1, 2, .., c)
(11)
• 式(11)より学習パターンを逐次更新していき最終的に
Jの最小解にたどり着く
⇢は刻み幅
- 23.
- 24.
- 25.
- 26.
- 27.
- 28.
- 29.
- 30.
- 31.
- 32.
- 33.
- 34.
- 35.
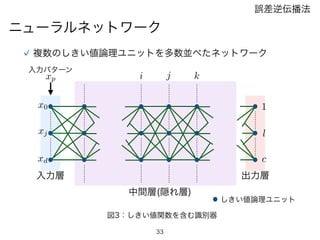
35
ji k
xp
gip
hjp hkp
gjpgkp
wij
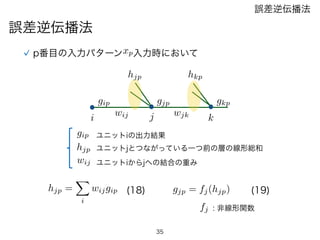
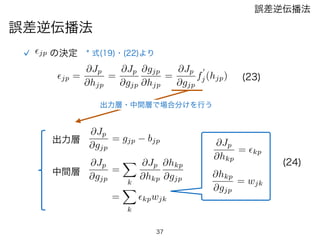
誤差逆伝播法
誤差逆伝播法
wjk
p番目の入力パターン 入力時において
ユニットiの出力結果gip
ユニットjとつながっている一つ前の層の線形総和
ユニットiからjへの結合の重み
hjp
wij
hjp =
X
i
wijgip gjp = fj(hjp)(18) (19)
fj : 非線形関数
- 36.
- 37.
- 38.
- 39.
39
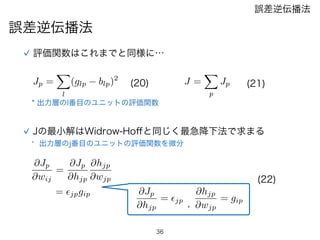
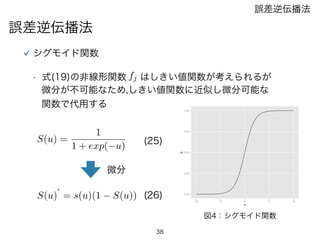
誤差逆伝播法
誤差逆伝播法
非線形関数fj の変形 *式(19)・(26)より
fj(hjp)
0
= gjp(1 gjp) (27)
✏jp は次のように求まる
X
k
✏kpwjk
!
gjp(1 gjp)
(gjp bjp)gjp(1 gjp)
✏jp =
(ユニットjが出力層にあるとき)
(ユニットjが中間層にあるとき)
(28a)
(28b)
- 40.