More Related Content

PDF
![SSII2022 [TS3] コンテンツ制作を支援する機械学習技術〜 イラストレーションやデザインの基礎から最新鋭の技術まで 〜](https://cdn.slidesharecdn.com/ss_thumbnails/ts32022ssiiess-220607054523-e80be8dc-thumbnail.jpg?width=640&height=640&fit=bounds)
PDF
SSII2022 [TS3] コンテンツ制作を支援する機械学習技術〜 イラストレーションやデザインの基礎から最新鋭の技術まで 〜 
PPTX

PDF
Matrix Factorizationを使った評価予測 
PDF
PCSJ/IMPS2021 講演資料:深層画像圧縮からAIの生成モデルへ (VAEの定量的な理論解明) 
PDF
Learning Deep Architectures for AI (第 3 回 Deep Learning 勉強会資料; 松尾) 
PDF
lispmeetup#63 Common Lispでゼロから作るDeep Learning 
PPTX
Similar to 2024年5月17日 先駆的科学計算フォーラム2024 機械学習を用いた新たなゲーム体験の創出の応用

PPTX
![[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース...](https://cdn.slidesharecdn.com/ss_thumbnails/20190426akuzawa-190426020057-thumbnail.jpg?width=640&height=640&fit=bounds)
PPTX
[DL輪読会]“SimPLe”,“Improved Dynamics Model”,“PlaNet” 近年のVAEベース系列モデルの進展とそのモデルベース... 
PPTX
機械学習 / Deep Learning 大全 (2) Deep Learning 基礎編 
PDF
"Playing Atari with Deep Reinforcement Learning" 
PDF
東大大学院 電子情報学特論講義資料「深層学習概論と理論解析の課題」大野健太 
PPTX

PDF
Seeing Unseens with Machine Learning --
見えていないものを見出す機械学習 
PDF

PPTX

PPTX
「機械学習とは?」から始める Deep learning実践入門 
PDF
Taking a Deeper Look at the Inverse Compositional Algorithm 
PPTX
DataEngConf NYC’18 セッションサマリー #2 
PPTX

PDF

PDF
ディープラーニング入門 ~ 画像処理・自然言語処理について ~ 
PDF
Incentive Compatible Regression Learning (Mathematical Informatics Reading) 
PPTX
Deep learning basics described 
PDF

PPTX
Azure Machine Learning services 2019年6月版 
PDF
DEEP LEARNING、トレーニング・インファレンスのGPUによる高速化 More from KLab Inc. / Tech

PDF
【公開用】モバイルオンラインゲーム開発を支える早く、安く、使いやすいサーバインフラ構築 
PDF
モバイルオンラインゲームのアプリ外課金の導入と運用方法について 
PDF
デバイスファーム 「AirLab」 による 自動QAテストの実績と機械学習が拓く次世代QAの可能性 
PDF
大規模モバイルオンラインゲーム開発における チーム組成とワークフロー最適化 
PDF
運用中の大規模オンラインゲームで 8年ぶりにPHPバージョンアップをした話 
PDF
AirLab導入でテストコストの大幅削減と品質向上! 数十台の端末を一斉に全自動テストできる社内DeviceFarmについてご紹介 
PDF

PDF
表も裏もすべて見せます! KLab謹製大規模オンラインゲームの リアルタイムチャットマイクロサービス 
PDF
モバイルオンラインゲームでの大規模観戦とチート対策 〜自社製リアルタイム通信システム「WSNet2」の事例〜 
PDF

PDF

PDF
ゲーム開発を知らない人にも分かるKLabのゲーム開発運営 
PDF
「リアルISUCON」としてのモバイルオンラインゲーム開発 
PDF
ゴリラテスト モバイルゲームのUIを自動的に検出・操作する モンキーテスト 
PDF
モバイルアプリの高速で安定したビルドを支えるJenkins運用術 
PDF
『ラブライブ!スクールアイドルフェスティバル ALL STARS』を支えるビルドパイプライン 〜より安定したサービス提供を目指して〜 
PPTX

PPTX
Ganglia のUIにGrafanaを追加する話 
PPTX
KLabのインフラエンジニア 〜 こんな感じで働いてます 〜 
PPTX
属人化して詰まってた作業を自動化で楽しようとした話 2024年5月17日 先駆的科学計算フォーラム2024 機械学習を用いた新たなゲーム体験の創出の応用
- 1.
Copyright (c) KLabInc. All Rights Reserved.
機械学習を用いた
新たなゲーム体験の創出の応用
2024年5月17日 先駆的科学計算フォーラム2024
KLab株式会社 濱田直希
- 2.
© KLab Inc.
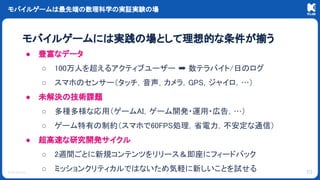
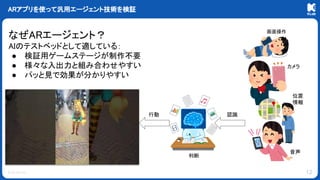
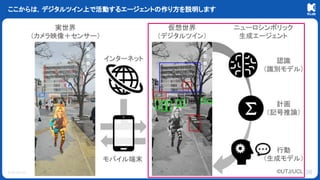
●ゲームにおけるAIとARの動向
○ 最近のゲームにおけるAIとARのトレンド
○ KLab×九州大学 AR×ML研究プロジェクト
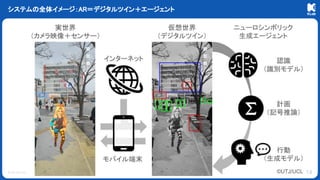
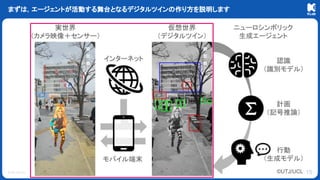
● モバイルARゲームにおけるデジタルツインの構築
○ センサーとインターネットによる実世界情報の獲得
○ デジタルツインのリアルタイム構築と記号化
● モバイルARゲームにおけるエージェントの構築
○ ニューロシンボリック生成ループ
○ エージェントの多様性のモデリング
本日のアジェンダ
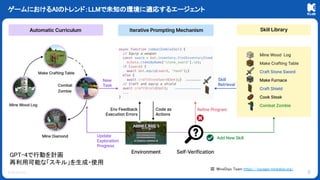
ニューロシンボリックAIで汎用エージェントを作る
2
- 3.
- 4.
© KLab Inc.
会社紹介
4
社名
KLab株式会社(クラブかぶしきかいしゃ)
KLabInc.
設立 2000年8月1日
資本金 54億5795万円(2024年3月末現在)
株式公開市場 東京証券取引所・プライム市場(3656)
代表者
代表取締役社長CEO 森田 英克
代表取締役副会長 五十嵐洋介
所在地
本社(東京都港区、六本木ヒルズ森タワー)
大阪事業所、福岡事業所、仙台事業所
主要関連会社
株式会社グローバルギア
株式会社BLOCKSMITH&Co.
海外拠点 可来软件开发(上海)有限公司 (KLab China Inc.)
グループ従業員数 正社員 441名(2024年3月末現在)
- 5.
- 6.
© KLab Inc.
世界ゲーム市場は約29兆円(自動車の約1/13)その約半分はモバイルゲーム
6
図:Statista https://www.statista.com/chart/30560/estimated-global-video-game-revenues-by-segment/
$1=156にて29.2兆円
14.4兆円
8.7兆円
5.8兆円
0.3兆円
- 7.
© KLab Inc.
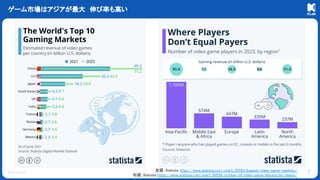
ゲーム市場はアジアが最大伸び率も高い
7
左図:Statista https://www.statista.com/chart/25593/biggest-video-game-markets/
右図:Statista https://www.statista.com/chart/30559/number-of-video-game-players-by-region/
- 8.
- 9.
- 10.
- 11.
© KLab Inc.
KLab×九州大学AR×ML研究プロジェクト
11
九州大学 KLab
機械学習G
櫻井研究室 ゲームAI
コミュニティ
機械学習FWの開発 ARデモの開発・検証
フィードバック
導入
2022年度 https://www.klab.com/jp/press/release/2022/0525/klab_8.html
2023年度 https://www.klab.com/jp/press/release/2023/0426/klab_5.html
本研究は九州大学情報基盤研究開発センター研究用計算機システムの重点支援制度を利用した.
- 12.
- 13.
- 14.
- 15.
- 16.
- 17.
© KLab Inc.
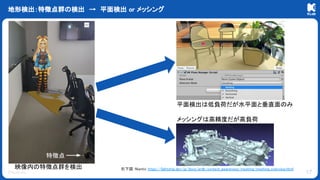
映像内の特徴点群を検出
地形検出:特徴点群の検出→ 平面検出 or メッシング
17
平面検出は低負荷だが水平面と垂直面のみ
メッシングは高精度だが高負荷
特徴点
右下図:Niantic https://lightship.dev/ja/docs/ardk/context_awareness/meshing/meshing_overview.html
- 18.
- 19.
© KLab Inc.
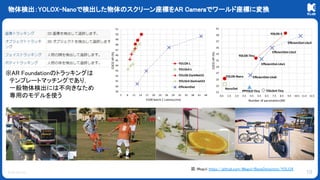
※ARFoundationのトラッキングは
テンプレートマッチングであり,
一般物体検出には不向きなため
専用のモデルを使う
物体検出:YOLOX-Nanoで検出した物体のスクリーン座標をAR Cameraでワールド座標に変換
19
図:Megvii https://github.com/Megvii-BaseDetection/YOLOX
- 20.
- 21.
© KLab Inc.
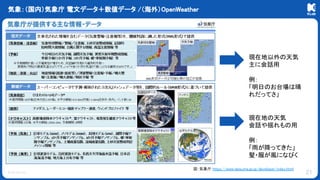
気象:(国内)気象庁電文データ+数値データ /(海外)OpenWeather
21
図:気象庁 https://www.data.jma.go.jp/developer/index.html
現在地の天気
会話や揺れもの用
例:
「雨が降ってきた」
髪・服が風になびく
現在地以外の天気
主に会話用
例:
「明日のお台場は晴
れだってさ」
- 22.
© KLab Inc.
ランドマーク:GoogleCloud Vision API (Landmark Detection)
22
図・コード:Google https://cloud.google.com/vision/docs/detecting-landmarks
画面内の建物やオブジェなどを認
識して,場所ID,説明文,緯度経度
などを取得できる.
取得した場所IDを他のAPIで使用
すれば,その場所への経路やクチ
コミなども取得できる.
場所ID
説明文
緯度経度
User:この写真の場所まで案内して AI:聖ワシリイ大聖堂だね。
[場所検索して ] モスクワにある世界遺産だよ。
[経路検索して ] 道順は…
- 23.
© KLab Inc.
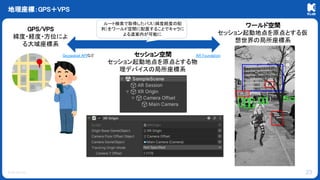
地理座標:GPS+VPS
23
ARFoundation
GPS/VPS
緯度・経度・方位によ
る大域座標系
セッション空間
セッション起動地点を原点とする物
理デバイスの局所座標系
ワールド空間
セッション起動地点を原点とする仮
想世界の局所座標系
ルート検索で取得したパス(緯度経度の配
列)をワールド空間に配置することでキャラに
よる道案内が可能に
Geospatial APIなど
- 24.
© KLab Inc.
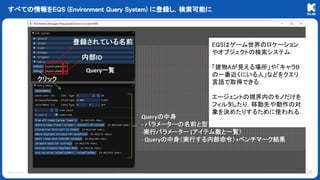
すべての情報をEQS(Environment Query System) に登録し,検索可能に
24
EQSはゲーム世界のロケーション
やオブジェクトの検索システム.
「建物Aが見える場所」や「キャラB
の一番近くにいる人」などをクエリ
言語で取得できる.
エージェントの視界内のモノだけを
フィルタしたり,移動先や動作の対
象を決めたりするために使われる.
- 25.
- 26.
- 27.
© KLab Inc.
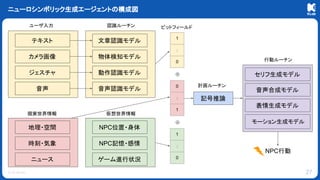
ニューロシンボリック生成エージェントの構成図
27
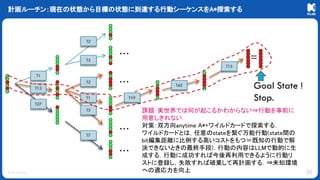
ユーザ入力認識ルーチン
テキスト
ジェスチャ
音声
カメラ画像
文章認識モデル
物体検知モデル
動作認識モデル
音声認識モデル
現実世界情報 仮想世界情報
⊕
⊕
地理・空間
時刻・気象
ニュース ゲーム進行状況
ビットフィールド
27
計画ルーチン
記号推論
NPC行動
行動ルーチン
セリフ生成モデル
音声合成モデル
表情生成モデル
モーション生成モデル
1
:
0
0
:
1
1
:
0
NPC位置・身体
NPC記憶・感情
- 28.
- 29.
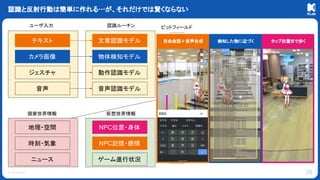
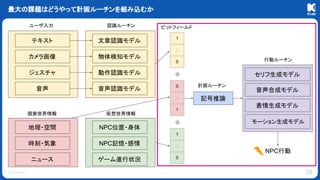
© KLab Inc.
最大の課題はどうやって計画ルーチンを組み込むか
29
ユーザ入力認識ルーチン
テキスト
ジェスチャ
音声
カメラ画像
文章認識モデル
物体検知モデル
動作認識モデル
音声認識モデル
現実世界情報
1
:
0
仮想世界情報
0
:
1
1
:
0
⊕
⊕
地理・空間 NPC位置・身体
NPC記憶・感情
ゲーム進行状況
計画ルーチン
記号推論
NPC行動
行動ルーチン
セリフ生成モデル
音声合成モデル
表情生成モデル
モーション生成モデル
時刻・気象
ニュース
ビットフィールド
- 30.
- 31.
- 32.
- 33.
© KLab Inc.
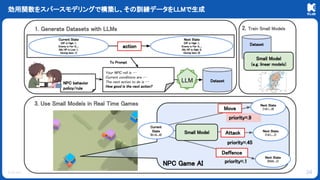
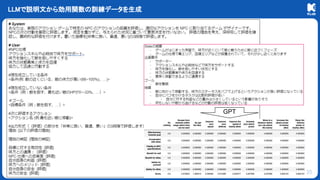
教師データがあれば写像(a*,u*)を学習できるかも?
機械学習とかでいい感じに自動設計できないの?
33
状態空間Sから行動空間A×効用空間Uへの写像※
を作る
※ a*やu*が通常の意味での写像とな
るのは最適化問題が良設定な場合に
限り,一般には集合値写像になる.
詳しくは[Khan+ 2015]を参照.
- 34.
- 35.
- 36.
© KLab Inc.
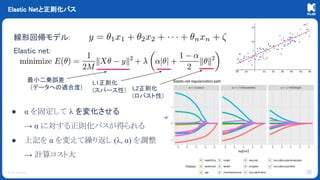
●α を固定して λ を変化させる
→ α に対する正則化パスが得られる
● 上記を α を変えて繰り返し (λ, α) を調整
→ 計算コスト大
Elastic Netと正則化パス
36
線形回帰モデル:
Elastic net:
最小二乗誤差
(データへの適合度)
L1正則化
(スパース性) L2正則化
(ロバスト性)
- 37.
- 38.
- 39.
- 40.
- 41.
- 42.
© KLab Inc.
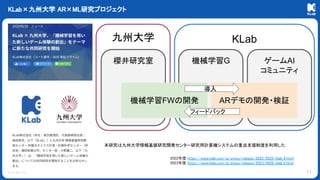
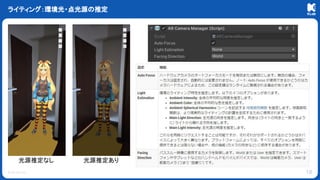
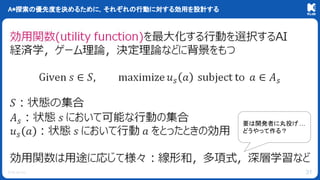
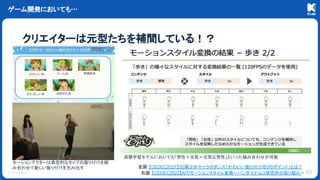
効用関数の違いによってNPCの個性を表現
42
攻撃型敵が多い場所に入っていって、積極的に攻撃に参加する攻撃型キャラク
ター。ボールを積極的に拾いながら、敵に近距離攻撃を与える。敵に攻撃
ができる時は、ボールを積極的に投げていく。危険な時は攻撃を回避しす
る。
バランス型 攻撃もしつつ、危険な時は攻撃を回避し、味方のサポートも行うバランス
型のキャラクター。できるだけチームの勝利に貢献するために、いろんな
動きを柔軟に行う。攻撃ができそうな時は攻撃する。
サポート型 危険な味方の攻撃をサポートするキャラクター。敵が多い場所にはあまり
近付かず、できるだけ離れたところからボールを拾って、敵を攻撃する。危
険な時は攻撃を回避する。敵が居て、攻撃ができる時は攻撃する。
- 43.
- 44.
- 45.
- 46.
- 47.
© KLab Inc.
ベジエ単体を使ったMemeticAlgorithm(ランダムサンプルと勾配法の交互探索)
47
[Sannai+ 2022] Bézier Flow: a Surface-wise Gradient Descent Method for Multi-objective Optimization
- 48.
- 49.
© KLab Inc.
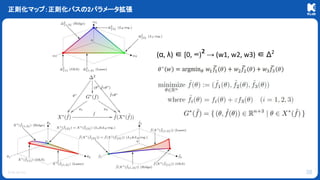
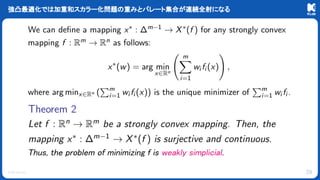
より簡単な条件に言い換え:条件1⇔ 条件1a & 条件1b
49
[Hamada 2017] Simple problems: The simplicial gluing structure of Pareto sets and Pareto fronts. In GECCO 2017, pp. 315-316.
- 50.
- 51.
- 52.
- 53.
- 54.



![© KLab Inc.
ランドマーク:Google Cloud Vision API (Landmark Detection)
22
図・コード:Google https://cloud.google.com/vision/docs/detecting-landmarks
画面内の建物やオブジェなどを認
識して,場所ID,説明文,緯度経度
などを取得できる.
取得した場所IDを他のAPIで使用
すれば,その場所への経路やクチ
コミなども取得できる.
場所ID
説明文
緯度経度
User:この写真の場所まで案内して AI:聖ワシリイ大聖堂だね。
[場所検索して ] モスクワにある世界遺産だよ。
[経路検索して ] 道順は…](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-22-320.jpg)
![© KLab Inc.
教師データがあれば写像(a*, u*)を学習できるかも?
機械学習とかでいい感じに自動設計できないの?
33
状態空間Sから行動空間A×効用空間Uへの写像※
を作る
※ a*やu*が通常の意味での写像とな
るのは最適化問題が良設定な場合に
限り,一般には集合値写像になる.
詳しくは[Khan+ 2015]を参照.](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-33-320.jpg)

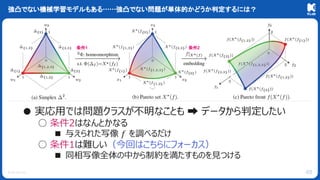
![© KLab Inc.
生物の形質多様性はパレート集合としてモデリングできることが知られている
44
遺伝的形質は「元型」を頂点とする単体状に分布する
[Shoval+ 2012] Evolutionary Trade-Offs, Pareto Optimality, and the Geometry of Phenotype Space, Science, Vol. 336, Issue 6085, pp. 1157-1160
archetype=1つの目的に特化した解 パレート集合](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-44-320.jpg)
![© KLab Inc.
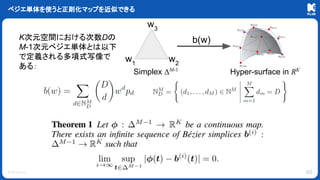
単体からの層化抽出で学習を加速(⇒1~2次ベジエ単体の貼り合わせがよい)
46
[Tanaka+ 2020] Asymptotic Risk of Bézier Fitting
AAO
ISK](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-46-320.jpg)
![© KLab Inc.
ベジエ単体を使ったMemetic Algorithm(ランダムサンプルと勾配法の交互探索)
47
[Sannai+ 2022] Bézier Flow: a Surface-wise Gradient Descent Method for Multi-objective Optimization](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-47-320.jpg)
![© KLab Inc.
より簡単な条件に言い換え:条件1 ⇔ 条件1a & 条件1b
49
[Hamada 2017] Simple problems: The simplicial gluing structure of Pareto sets and Pareto fronts. In GECCO 2017, pp. 315-316.](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-49-320.jpg)
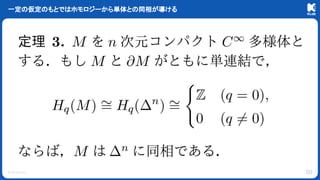
![© KLab Inc.
パーシステンス図の信頼区間を使えばサンプルからホモロジーを推定できる
51
[Fasy+ 2014] Confidence sets for persistence diagrams. Ann. Statist. Vol. 42, No. 6, pp. 2301-2339.](https://image.slidesharecdn.com/senkuteki-kagakukeisan-forum-2024-240516083934-b9e04a04/85/2024-5-17-2024-51-320.jpg)