Download free for 30 days
Sign in
Upload
Language (EN)
Support
Business
Mobile
Social Media
Marketing
Technology
Art & Photos
Career
Design
Education
Presentations & Public Speaking
Government & Nonprofit
Healthcare
Internet
Law
Leadership & Management
Automotive
Engineering
Software
Recruiting & HR
Retail
Sales
Services
Science
Small Business & Entrepreneurship
Food
Environment
Economy & Finance
Data & Analytics
Investor Relations
Sports
Spiritual
News & Politics
Travel
Self Improvement
Real Estate
Entertainment & Humor
Health & Medicine
Devices & Hardware
Lifestyle
Change Language
Language
English
Español
Português
Français
Deutsche
Cancel
Save
EN
Uploaded by
Kazuaki Ishizaki
PDF, PPTX
1,202 views
20180109 titech lecture_ishizaki_public
東工大のH29年度数理・計算科学特論C 、で講義をさせていただいた際に使用した資料です。
Software
◦
Related topics:
Deep Learning
•
Read more
7
Save
Share
Embed
Embed presentation
Download
Download as PDF, PPTX
1
/ 48
2
/ 48
3
/ 48
4
/ 48
5
/ 48
6
/ 48
7
/ 48
8
/ 48
9
/ 48
10
/ 48
11
/ 48
12
/ 48
13
/ 48
14
/ 48
15
/ 48
16
/ 48
17
/ 48
18
/ 48
19
/ 48
20
/ 48
21
/ 48
22
/ 48
23
/ 48
24
/ 48
25
/ 48
26
/ 48
27
/ 48
28
/ 48
29
/ 48
30
/ 48
31
/ 48
32
/ 48
33
/ 48
34
/ 48
35
/ 48
36
/ 48
37
/ 48
38
/ 48
39
/ 48
40
/ 48
41
/ 48
42
/ 48
43
/ 48
44
/ 48
45
/ 48
46
/ 48
47
/ 48
48
/ 48
More Related Content
PDF
20171212 titech lecture_ishizaki_public
by
Kazuaki Ishizaki
PDF
SparkTokyo2019NovIshizaki
by
Kazuaki Ishizaki
PDF
Introduction new features in Spark 3.0
by
Kazuaki Ishizaki
PDF
Project Tungsten Bringing Spark Closer to Bare Meta (Hadoop / Spark Conferenc...
by
Hadoop / Spark Conference Japan
PDF
広告配信現場で使うSpark機械学習
by
x1 ichi
PDF
2015-11-17 きちんと知りたいApache Spark ~機械学習とさまざまな機能群
by
Yu Ishikawa
PDF
20141224 titech lecture_ishizaki_public
by
Kazuaki Ishizaki
PPTX
R超入門機械学習をはじめよう
by
幹雄 小川
20171212 titech lecture_ishizaki_public
by
Kazuaki Ishizaki
SparkTokyo2019NovIshizaki
by
Kazuaki Ishizaki
Introduction new features in Spark 3.0
by
Kazuaki Ishizaki
Project Tungsten Bringing Spark Closer to Bare Meta (Hadoop / Spark Conferenc...
by
Hadoop / Spark Conference Japan
広告配信現場で使うSpark機械学習
by
x1 ichi
2015-11-17 きちんと知りたいApache Spark ~機械学習とさまざまな機能群
by
Yu Ishikawa
20141224 titech lecture_ishizaki_public
by
Kazuaki Ishizaki
R超入門機械学習をはじめよう
by
幹雄 小川
What's hot
PPTX
2014 11-20 Machine Learning with Apache Spark 勉強会資料
by
Recruit Technologies
PDF
20191211_Apache_Arrow_Meetup_Tokyo
by
Kohei KaiGai
PDF
20211112_jpugcon_gpu_and_arrow
by
Kohei KaiGai
PDF
GMO プライベート DMP で ビッグデータ解析をするために アプリクラウドで Apache Spark の検証をしてみた
by
Tetsuo Yamabe
PPTX
Parquetはカラムナなのか?
by
Yohei Azekatsu
PDF
Volta は、Chainer で使えるの?
by
NVIDIA Japan
PDF
Thinking in Cats
by
Eugene Yokota
PDF
Oracle Cloud Developers Meetup@東京
by
tuchimur
PDF
Hivemallで始める不動産価格推定サービス
by
Kentaro Yoshida
PDF
PostgreSQL9.3新機能紹介
by
NTT DATA OSS Professional Services
PDF
perfを使ったPostgreSQLの解析(後編)
by
NTT DATA OSS Professional Services
PDF
第3回機械学習勉強会「色々なNNフレームワークを動かしてみよう」-Keras編-
by
Yasuyuki Sugai
PDF
TensorFlow XLA とハードウェア
by
Mr. Vengineer
PDF
Lt ingaoho-jsonb+postgeres fdw
by
Toshi Harada
PDF
Introduction to Chainer and CuPy
by
Kenta Oono
PPTX
PostgreSQLクエリ実行の基礎知識 ~Explainを読み解こう~
by
Miki Shimogai
PDF
pg_bigm(ピージー・バイグラム)を用いた全文検索のしくみ(後編)
by
Masahiko Sawada
PDF
深層学習フレームワークChainerの紹介とFPGAへの期待
by
Seiya Tokui
PDF
サイバーエージェントにおけるMLOpsに関する取り組み at PyDataTokyo 23
by
Masashi Shibata
PDF
20200424_Writable_Arrow_Fdw
by
Kohei KaiGai
2014 11-20 Machine Learning with Apache Spark 勉強会資料
by
Recruit Technologies
20191211_Apache_Arrow_Meetup_Tokyo
by
Kohei KaiGai
20211112_jpugcon_gpu_and_arrow
by
Kohei KaiGai
GMO プライベート DMP で ビッグデータ解析をするために アプリクラウドで Apache Spark の検証をしてみた
by
Tetsuo Yamabe
Parquetはカラムナなのか?
by
Yohei Azekatsu
Volta は、Chainer で使えるの?
by
NVIDIA Japan
Thinking in Cats
by
Eugene Yokota
Oracle Cloud Developers Meetup@東京
by
tuchimur
Hivemallで始める不動産価格推定サービス
by
Kentaro Yoshida
PostgreSQL9.3新機能紹介
by
NTT DATA OSS Professional Services
perfを使ったPostgreSQLの解析(後編)
by
NTT DATA OSS Professional Services
第3回機械学習勉強会「色々なNNフレームワークを動かしてみよう」-Keras編-
by
Yasuyuki Sugai
TensorFlow XLA とハードウェア
by
Mr. Vengineer
Lt ingaoho-jsonb+postgeres fdw
by
Toshi Harada
Introduction to Chainer and CuPy
by
Kenta Oono
PostgreSQLクエリ実行の基礎知識 ~Explainを読み解こう~
by
Miki Shimogai
pg_bigm(ピージー・バイグラム)を用いた全文検索のしくみ(後編)
by
Masahiko Sawada
深層学習フレームワークChainerの紹介とFPGAへの期待
by
Seiya Tokui
サイバーエージェントにおけるMLOpsに関する取り組み at PyDataTokyo 23
by
Masashi Shibata
20200424_Writable_Arrow_Fdw
by
Kohei KaiGai
Similar to 20180109 titech lecture_ishizaki_public
PDF
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
PDF
20230105_TITECH_lecture_ishizaki_public.pdf
by
Kazuaki Ishizaki
PDF
Intel AVX2を使用したailia sdkの最適化
by
HitoshiSHINABE1
PDF
Boost.SIMD
by
Akira Takahashi
PPTX
The simd
by
兎 伊藤
PDF
第11回 配信講義 計算科学技術特論B(2022)
by
RCCSRENKEI
PDF
2021 03-09-ac ri-nngen
by
直久 住川
PDF
AVX命令を用いたLJの力計算のSIMD化
by
Hiroshi Watanabe
PDF
CMD2021 f01 xilinx_20210921_r1.1
by
Yoshihiro Horie
PDF
OSC 2012 Hokkaido でのプレゼン資料
by
Shin-ya Koga
PDF
エバンジェリストが語るパワーシステム特論 ~ 第3回:IBMオフコンはいかにして生き残れたのか?~第二章~
by
Takumi Kurosawa
PPTX
Boost study14
by
fjnl
PDF
Tuning, etc.
by
Hiroshi Watanabe
PDF
AMD_Xilinx_AI_VCK5000_20220602R1.pdf
by
直久 住川
PPTX
SIMD in dlang
by
Suzuki Hajime
PDF
kagamicomput201814
by
swkagami
PDF
CMSI計算科学技術特論A(9) 高速化チューニングとその関連技術2
by
Computational Materials Science Initiative
PPTX
並列計算への道 2015年版
by
ryos36
PDF
200730material fujita
by
RCCSRENKEI
PDF
Reconf 201901
by
Takefumi MIYOSHI
ARM CPUにおけるSIMDを用いた高速計算入門
by
Fixstars Corporation
20230105_TITECH_lecture_ishizaki_public.pdf
by
Kazuaki Ishizaki
Intel AVX2を使用したailia sdkの最適化
by
HitoshiSHINABE1
Boost.SIMD
by
Akira Takahashi
The simd
by
兎 伊藤
第11回 配信講義 計算科学技術特論B(2022)
by
RCCSRENKEI
2021 03-09-ac ri-nngen
by
直久 住川
AVX命令を用いたLJの力計算のSIMD化
by
Hiroshi Watanabe
CMD2021 f01 xilinx_20210921_r1.1
by
Yoshihiro Horie
OSC 2012 Hokkaido でのプレゼン資料
by
Shin-ya Koga
エバンジェリストが語るパワーシステム特論 ~ 第3回:IBMオフコンはいかにして生き残れたのか?~第二章~
by
Takumi Kurosawa
Boost study14
by
fjnl
Tuning, etc.
by
Hiroshi Watanabe
AMD_Xilinx_AI_VCK5000_20220602R1.pdf
by
直久 住川
SIMD in dlang
by
Suzuki Hajime
kagamicomput201814
by
swkagami
CMSI計算科学技術特論A(9) 高速化チューニングとその関連技術2
by
Computational Materials Science Initiative
並列計算への道 2015年版
by
ryos36
200730material fujita
by
RCCSRENKEI
Reconf 201901
by
Takefumi MIYOSHI
More from Kazuaki Ishizaki
PDF
20221226_TITECH_lecture_ishizaki_public.pdf
by
Kazuaki Ishizaki
PDF
Make AI ecosystem more interoperable
by
Kazuaki Ishizaki
PDF
Enabling Vectorized Engine in Apache Spark
by
Kazuaki Ishizaki
PDF
SQL Performance Improvements At a Glance in Apache Spark 3.0
by
Kazuaki Ishizaki
PDF
SparkTokyo2019
by
Kazuaki Ishizaki
PDF
In-Memory Evolution in Apache Spark
by
Kazuaki Ishizaki
PDF
icpe2019_ishizaki_public
by
Kazuaki Ishizaki
PDF
hscj2019_ishizaki_public
by
Kazuaki Ishizaki
PDF
Looking back at Spark 2.x and forward to 3.0
by
Kazuaki Ishizaki
PDF
Demystifying DataFrame and Dataset
by
Kazuaki Ishizaki
PDF
Transparent GPU Exploitation for Java
by
Kazuaki Ishizaki
PDF
Making Hardware Accelerator Easier to Use
by
Kazuaki Ishizaki
PDF
20160906 pplss ishizaki public
by
Kazuaki Ishizaki
PDF
Exploiting GPUs in Spark
by
Kazuaki Ishizaki
PDF
Easy and High Performance GPU Programming for Java Programmers
by
Kazuaki Ishizaki
PDF
Exploiting GPUs in Spark
by
Kazuaki Ishizaki
PDF
20151112 kutech lecture_ishizaki_public
by
Kazuaki Ishizaki
PDF
Java Just-In-Timeコンパイラ
by
Kazuaki Ishizaki
PDF
静的型付き言語用Just-In-Timeコンパイラの再利用による、動的型付き言語用コンパイラの実装と最適化
by
Kazuaki Ishizaki
20221226_TITECH_lecture_ishizaki_public.pdf
by
Kazuaki Ishizaki
Make AI ecosystem more interoperable
by
Kazuaki Ishizaki
Enabling Vectorized Engine in Apache Spark
by
Kazuaki Ishizaki
SQL Performance Improvements At a Glance in Apache Spark 3.0
by
Kazuaki Ishizaki
SparkTokyo2019
by
Kazuaki Ishizaki
In-Memory Evolution in Apache Spark
by
Kazuaki Ishizaki
icpe2019_ishizaki_public
by
Kazuaki Ishizaki
hscj2019_ishizaki_public
by
Kazuaki Ishizaki
Looking back at Spark 2.x and forward to 3.0
by
Kazuaki Ishizaki
Demystifying DataFrame and Dataset
by
Kazuaki Ishizaki
Transparent GPU Exploitation for Java
by
Kazuaki Ishizaki
Making Hardware Accelerator Easier to Use
by
Kazuaki Ishizaki
20160906 pplss ishizaki public
by
Kazuaki Ishizaki
Exploiting GPUs in Spark
by
Kazuaki Ishizaki
Easy and High Performance GPU Programming for Java Programmers
by
Kazuaki Ishizaki
Exploiting GPUs in Spark
by
Kazuaki Ishizaki
20151112 kutech lecture_ishizaki_public
by
Kazuaki Ishizaki
Java Just-In-Timeコンパイラ
by
Kazuaki Ishizaki
静的型付き言語用Just-In-Timeコンパイラの再利用による、動的型付き言語用コンパイラの実装と最適化
by
Kazuaki Ishizaki
20180109 titech lecture_ishizaki_public
1.
© 2017 IBM
Corporation 数理・計算科学特論C プログラミング言語処理系の最先端実装技術 第11講 ハードウェア・アクセラレーション 2018年1月9日 日本アイ・ビー・エム(株) 東京基礎研究所 石崎 一明 kiszk@acm.org (資料作成協力:井上拓、大平怜) IBM Research - Tokyo
2.
© 2017 IBM
Corporation IBM Research - Tokyo 自己紹介 石崎 一明(いしざき かずあき) http://ibm.biz/ishizaki 1992年3月 早稲田大学理工学研究科修士課程電気工学専攻を修了。 1992年4月 日本アイ・ビー・エム(株)入社、東京基礎研究所勤務。以来、並列化コンパイラ、動的 コンパイラ、アプリケーション最適化、などの研究に従事。最近は、GPGPUのためのコンパイル技術 の研究、Apache Sparkの高速化、に従事。現在、同研究所シニア・テクニカル・スタッフ・メンバー 2002年12月 早稲田大学理工学研究科にて、博士(情報科学)を取得。 2008年から2009年まで、IBMワトソン研究所に滞在。 2004年に情報処理学会業績賞受賞。ACMシニアメンバー、情報処理学会シニアメンバー 主なAcademic Activity 2004, 5年 日本ソフトウェア科学会PPL 2004/2005ワークショップ プログラム委員 2006年 日本ソフトウェア科学会PPL 2006ワークショップ プログラム共同委員長 2008年 PC Member of ACM OOPSLA 2013 Conference 2007~2009年度 日本ソフトウェア科学会プログラミング論研究会 運営委員 2011~2014年度 情報処理学会アーキテクチャ研究会 運営委員 2015年~ 日本ソフトウェア科学会理事 2016年度~ 情報処理学会プログラミング研究会 運営委員 2017年 PC Member of IEEE BigData 2017 2
3.
© 2017 IBM
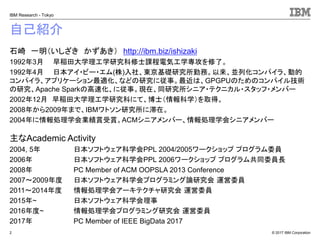
Corporation IBM Research - Tokyo 講義予定のおさらい と 今回のトピック 3 Topic Lecturer Date Time 1 Runtime – JVM Overview & Interpreter 緒方 11/30 木 13:20~14:50 2 Runtime – Object Management & Synchronization 河内谷 12/5 火 13:20~14:50 3 Runtime – Native Memory Management 緒方 12/5 火 15:05~16:35 4 Compiler – Overview 仲池 12/7 木 13:20~14:50 5 Compiler – Dataflow Analysis 稲垣 12/12 火 13:20~14:50 6 Compiler – Devirtualization & Inlining 石崎 12/12 火 15:05~16:35 7 Hot topic – X10 竹内 12/14 木 13:20~14:50 8 Hot topic – Open Source Java VM 堀江 12/19 火 13:20~14:50 9 Hot topic – Full-stack Optimization 堀井 12/19 火 15:05~16:35 10 Compiler – Trace Compilation & LLVM 井上 12/21 木 13:20~14:50 11 Hot topic – H/W Acceleration (GPGPU, HTM, FPGA) 石崎 1/9 火 13:20~14:50 12 まとめと展望 小野寺 1/9 火 15:05~16:35
4.
© 2017 IBM
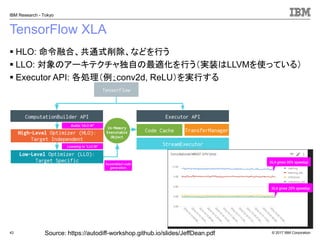
Corporation IBM Research - Tokyo 今日の講義内容 ▪ ハードウェアアクセラレータ、とは – あるカテゴリの演算を効率よく実行可能 ▪ プログラミング言語からハードウェアアクセラレータを使う方法 – 明示的にハードウェアアクセラレータを制御する命令を呼ぶ –ライブラリを経由してハードウェアアクセラレータを制御する命令を呼ぶ – システムが自動的にハードウェアアクセラレータを制御する命令を呼ぶ ▪ ハードウェアアクセラレータがよく使われる分野の一例 – 深層学習 4
5.
© 2017 IBM
Corporation IBM Research - Tokyo 今日の授業でわかること ▪ ハードウェアアクセラレータの概要について – SIMD – GPGPU – Hardware transactional memory –FPGA ▪ プログラミング言語からハードウェアアクセラレータを使う方法とその利点欠点( SIMDを例に) – プログラマが命令を書く –プログラマがライブラリを呼ぶ – プログラマが書いたプログラムをコンパイラが変換する ▪ 深層学習について – どのような処理が内部で行われているか –どのような処理がハードウェアアクセラレータで高速化できるか – プログラミング処理系として、どのような高速化ができるか 5
6.
© 2017 IBM
Corporation IBM Research - Tokyo ハードウェアアクセラレータとは? 6
7.
© 2017 IBM
Corporation IBM Research - Tokyo ハードウェアアクセラレータ ▪ CPUの汎用命令の組み合わせで処理していたのでは効率が悪い処理を、効 率よく処理するハードウェア – 改善例 • スループットの改善 • レイテンシの改善 • 消費電力効率の改善 – ハードウェア例 • Single Instruction Multiple Data (SIMD) • General Purpose Graphic Processing Unit (GPGPU) • Hardware Transactional Memory (HTM) • Field Programmable Gate Array (FPGA) • 専用ハードウェア –例: GRAvity PiPE (GRAPE) - 重力相互作用の計算 7
8.
© 2017 IBM
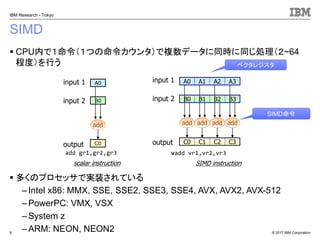
Corporation IBM Research - Tokyo SIMD ▪ CPU内で1命令(1つの命令カウンタ)で複数データに同時に同じ処理(2~64 程度)を行う ▪ 多くのプロセッサで実装されている – Intel x86: MMX, SSE, SSE2, SSE3, SSE4, AVX, AVX2, AVX-512 –PowerPC: VMX, VSX – System z – ARM: NEON, NEON28 ベクタレジスタ SIMD命令 A0 A1 A2 A3 B0 B1 B2 B3 C0 C1 C2 C3 add add add add input 1 input 2 output A0 B0 C0 add input 1 input 2 output add gr1,gr2,gr3 vadd vr1,vr2,vr3 scalar instruction SIMD instruction
9.
© 2017 IBM
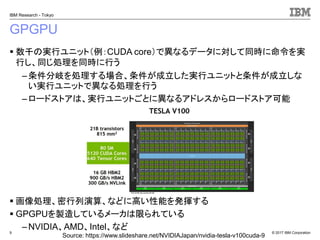
Corporation IBM Research - Tokyo GPGPU ▪ 数千の実行ユニット(例:CUDA core)で異なるデータに対して同時に命令を実 行し、同じ処理を同時に行う – 条件分岐を処理する場合、条件が成立した実行ユニットと条件が成立しな い実行ユニットで異なる処理を行う –ロードストアは、実行ユニットごとに異なるアドレスからロードストア可能 ▪ 画像処理、密行列演算、などに高い性能を発揮する ▪ GPGPUを製造しているメーカは限られている – NVIDIA、AMD、Intel、など9 Source: https://www.slideshare.net/NVIDIAJapan/nvidia-tesla-v100cuda-9
10.
© 2017 IBM
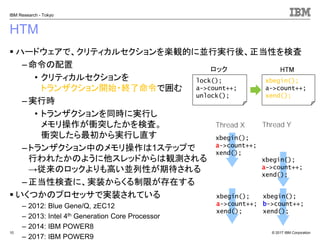
Corporation IBM Research - Tokyo HTM ▪ ハードウェアで、クリティカルセクションを楽観的に並行実行後、正当性を検査 – 命令の配置 • クリティカルセクションを トランザクション開始・終了命令で囲む –実行時 • トランザクションを同時に実行し メモリ操作が衝突したかを検査。 衝突したら最初から実行し直す – トランザクション中のメモリ操作は1ステップで 行われたかのように他スレッドからは観測される →従来のロックよりも高い並列性が期待される – 正当性検査に、実装からくる制限が存在する ▪ いくつかのプロセッサで実装されている – 2012: Blue Gene/Q, zEC12 – 2013: Intel 4th Generation Core Processor – 2014: IBM POWER8 – 2017: IBM POWER9 10 lock(); a->count++; unlock(); xbegin(); a->count++; xend(); xbegin(); a->count++; xend(); xbegin(); b->count++; xend(); xbegin(); a->count++; xend(); xbegin(); a->count++; xend(); Thread X Thread Y ロック HTM
11.
© 2017 IBM
Corporation IBM Research - Tokyo FPGA ▪ プログラミングによって、内部の論理回路を何度も再構成な半導体デバイス – 一般にCPUより、動作速度が遅い(1GHz程度) ▪ 性能あたりの消費電力を削減できることが多い ▪ FPGAを製造しているメーカは限られている – Xilinx、Altera、など 11
12.
© 2017 IBM
Corporation IBM Research - Tokyo 今日の授業でわかること ▪ ハードウェアアクセラレータの概要について – SIMD → 同じ処理を数十のデータに適用可能 – GPGPU → 同じ処理を数千のデータに適用可能で、異なる処理も一部可能 – Hardware transactional memory → 高い並列性を得ることができる –FPGA → 回路を書き換えることができ、電力当りの処理効率を高めやすい ▪ プログラミング言語からハードウェアアクセラレータを使う方法とその利点欠点( SIMDを例に) – プログラマがSIMD命令を書く –プログラマがライブラリを呼ぶ – プログラマが書いたプログラムをコンパイラが変換する ▪ 深層学習について – どのような処理が内部で行われているか –どのような処理がハードウェアアクセラレータで高速化できるか – プログラミング処理系として、どのような高速化ができるか 12
13.
© 2017 IBM
Corporation IBM Research - Tokyo プログラミング言語から ハードウェアアクセラレータを使うには? 13
14.
© 2017 IBM
Corporation IBM Research - Tokyo 使い方の3つの方法 ▪ 専用命令を使ってプログラミングする ▪ 特定の処理を行うライブラリを呼ぶ – 例:行列積 ▪ 普通にプログラムを書いて、コンパイラが自動的に専用命令を生成する 14
15.
© 2017 IBM
Corporation IBM Research - Tokyo SIMDの専用命令を使ってプログラミング ▪ 命令列を記述する方法 – アセンブラ、gcc/clangのasm文のインラインアセンブラ – gcc/clangの組み込み関数(intrinsic) • gccやclangでは、SIMD用にデータの型が拡張されている • コンパイラが、レジスタ割付けや命令スケジューリングを行ってくれる 15
16.
© 2017 IBM
Corporation IBM Research - Tokyo SIMD組み込み関数によるプログラム例 16 for (i = 0; i < N; i += 8) { __m256i v1 = _mm256_loadu_si256((__m256i *)(a+i)); __m256i v2 = _mm256_loadu_si256((__m256i *)(b+i)); __m256i v3 = _mm256_add_epi32(v1, v2); _mm256_storeu_si256((__m256i *)(c+i), v3); } for (i = 0; i < N; i++) c[i] = a[i] + b[i]; for (i = 0; i < N; i += 4) { vector int v1 = vec_ld(0, a+i); vector int v2 = vec_ld(0, b+i); vector int v3 = vec_add(v1, v2); vec_st(v3, 0, c+i); } 元のスカラループ AVX2用組み込み関数を使った例 VMX用組み込み関数を使った例 8 (= 256 / 32)要素を同時に処理 32-bit整数配列 4 (= 128 / 32)を同時に処理 vec_add() isはSIMDのadd命令に対応する vector int は4つの32-bit整数値を持つ ベクタレジスタ
17.
© 2017 IBM
Corporation IBM Research - Tokyo SIMD組み込み関数でプログラミングする利点欠点 ☺高い性能を得ることができる – このためには、アルゴリズムやデータ配置まで変更することが多い ☺アセンブラで書くよりは、簡単にプログラムを書くことができる – レジスタ割付けや命令スケジューリングは、コンパイラが行う プログラミング、デバッグ、メンテナンスが容易ではない プロセッサ・アーキテクチャに依存したコードとなり、プロセッサ間の移植性が 低い Java、JavaScriptのようなプラットフォーム独立な言語では、あまり適していな い 17
18.
© 2017 IBM
Corporation IBM Research - Tokyo SIMD命令を使うライブラリによるプログラム例 18 // c = αAB + βC を計算する cblas_dgemm(CblasRowMajor, CblasNoTrans, CblasNoTrans, N, N, N, 1.0, A, N, B, N, 0.0, C, N); for (i = 0; i < N; i++) for (j = 0; j < N; j++) for (k = 0; k < N; k++) C[i*N + j] += A[i*N + k] * B[k*N + j]; 元のスカラループ 行列積を計算するライブラリを使った例
19.
© 2017 IBM
Corporation IBM Research - Tokyo SIMD命令を使うライブラリでプログラミングする利点欠点 ☺高い性能を得ることができる – プロセッサメーカーが最適化したライブラリは、プログラマがアセンブラで書 くより性能が高いことがある ☺簡単にプログラムを書くことができる 高速化できる処理が、ライブラリで提供された処理に限られる データ配置などの前提が合わないときは、使用できない。もしくは、データ変換 が必要になる。 19
20.
© 2017 IBM
Corporation IBM Research - Tokyo コンパイラによる自動SIMD命令生成でプログラミング ▪ 自動ベクタ化(automatic vectorization)によって、プログラマが書いたコードか ら、自動的にSIMD命令を生成する ▪ コンパイラは与えられたループを解析して、可能であればSIMD命令を用いる ループを生成する – 可能でない、と判断する主な原因 • ループ間にデータ依存(loop-carried dependence)がある • ループ内に(if文などの)分岐がある場合 • メモリアクセスが、キャッシュ境界からずれている • ループ内に、メソッド呼び出しがある 20
21.
© 2017 IBM
Corporation IBM Research - Tokyo コンパイラによる自動SIMD命令生成のプログラム例 ▪ コンパイラが行う解析 – 入力と出力の配列が、同じメモリアドレスをアクセスしていないか? Loop-carried dependenceの存在確認 – メモリアクセスが、キャッシュ境界からずれていないか? • キャッシュ境界からずれた部分を処理する、非SIMDコードを生成する – ループを繰り返し実行する回数N、はベクタ長の倍数か? • 倍数でない可能性があるときは、端数を処理する非SIMDコードを生成 する 21 元のスカラループ for (i = S; i < E; i++) c[i] = a[i] + b[i];
22.
© 2017 IBM
Corporation IBM Research - Tokyo コンパイラの解析を助ける方法 ▪ アルゴリズムやデータ配置の変更 – アルゴリズム • 例:SOR → Red-black SOR – データ配置 • 例:Array of structs(AOS) → Struct of arrays(SOA) ▪ プログラムの性質の保証 – “restrict” keyword of C99 • ある配列変数が、他の変数とエイリアスしないことを保証する – Pragmaを用いた、SIMDを使用する宣言 22 void func(double *restrict a, double *restrict b, double *restrict c) { /* 配列a[], b[], and c[]はこの関数の中で異なるアドレスであることを保証 */ } #pragma omp simd (OpenMP 4.0) #pragma simd (icc) #pragma disjoint (xlc)
23.
© 2017 IBM
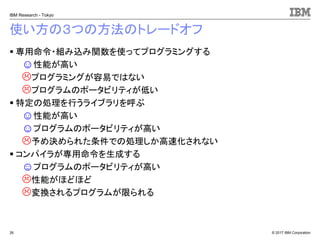
Corporation IBM Research - Tokyo AOSとSOA ▪ データ配置の変更は、非効率な非連続メモリアクセスをなくしたSIMD命令実行 のために、重要であることが多い – コンパイラは、このようなデータ配置の変更は容易ではない 23 y0 z0x0 y1 z1x1 y2 z2x2 y3 z3x3 x0 x1 x2 x3 y4 z4x4 x4 y0 y1 y2 y3 y4 z0 z1 z2 z3 z4 Array of Structures (AOS) Structure of arrays (SOA) y5x5 (4-wayのSIMDを仮定) struct _AOS { double x, y, z; } struct _AOS aos[N]; struct _SOA { double x[N], y[N], z[N]; } struct _SOA soa; x0 x1 x2 x3 x4y0 y1 y2 y3 z0 z1 z2 z3 Hybrid x5 x6 x7 y4 struct _HYBRID { double x[4], y[4], z[4]; } struct _HYBRID hybrid[N/4];
24.
© 2017 IBM
Corporation IBM Research - Tokyo コンパイラによる自動SIMD命令生成でプログラミングする利点欠点 ☺ソースコードをSIMD専用に変更する必要がない SIMD組み込み関数、ライブラリを使った場合ほどの性能向上が得られないこ とが多い 24 [1] Maleki et al. “An Evaluation of Vectorizing Compilers”, PACT 2011 on POWER7 on Nehalem ベンチマークプログラムのSIMD無し実行に対する、平均性能向上比[1] XLC ICC GCC プログラムの変更なしに自動SIMD命令生成 1.66 1.84 1.58 プログラムを手で変換後、自動SIMD命令生成 2.97 2.38 N/A SIMD組み込み関数で記述 3.15 2.45 N/A
25.
© 2017 IBM
Corporation IBM Research - Tokyo Java処理系でのSIMD命令利用方法 ▪ 単純ループのコンパイラによる自動SIMD変換 • 複雑なループも技術的には変換可能だが、動的コンパイラでは時間が かかる解析を行うことは難しい – 行列積、行列ベクトル積を行うループなどは変換可能 –演算対象が一次元のprimitive type配列であること – IBM Java 8、Open JDK 8/9に実装 ▪ Javaクラスライブラリでの活用 – ループ処理が多いライブラリで使用 • java/lang/String, Java/util/Arrays, String encoding converter • IBM Java 8に実装 ▪ SIMD組み込み関数 – Vector APIとして議論中 25 for (int i = 0; i < C.length; i++) { C[i] = A[i] + B[i]; } FloatVector.FloatSpecies<Shapes.S256Bit> species = (FloatVector.FloatSpecies<Shapes.S256Bit>) Vector.speciesInstance(Float.class, Shapes.S_256_BIT); void add(float[] A, float [] B, float [] C) { FloatVector<Shapes.S256Bit> a, b, c; a = species.fromArray(A, 0); b = species.fromArray(B, 0); c = a.add(b); c.intoArray(C, 0); } 元のスカラループ 提案中の組み込み関数を使った例 https://software.intel.com/en-us/articles/vector-api-developer-program-for-java
26.
© 2017 IBM
Corporation IBM Research - Tokyo 使い方の3つの方法のトレードオフ ▪ 専用命令・組み込み関数を使ってプログラミングする ☺性能が高い プログラミングが容易ではない プログラムのポータビリティが低い ▪ 特定の処理を行うライブラリを呼ぶ ☺性能が高い ☺プログラムのポータビリティが高い 予め決められた条件での処理しか高速化されない ▪ コンパイラが専用命令を生成する ☺プログラムのポータビリティが高い 性能がほどほど 変換されるプログラムが限られる 26
27.
© 2017 IBM
Corporation IBM Research - Tokyo GPGPUの利用方法 ▪ 専用命令を使ってプログラミングする – GPGPUメーカーが用意したアセンブリ言語、専用関数でプログラムを書く • PTX(NVIDIA)、GCN(AMD) ▪ 特定の処理を行うライブラリを呼ぶ –cuBLAS、などの行列演算 • プログラマがアセンブラで書くより速いことが多い ▪ 普通にプログラムを書いて、コンパイラが自動的に専用命令を生成する – ホスト-アクセラレータ間の処理などは自分で書く(例:CUDA, OpenCL) –コンパイラが自動でコードを生成する(例:OpenACC, OpenMP) 27 #pragma acc parallel loop for (i = 0; i < N; i++) c[i] = a[i] + b[i]; cudaMalloc(&d_a, N*sizeof(float)); cudaMemcpy(d_a, a, N*sizeof(float), cudaMemcpyHostToDevice) ... add<<GRID, BLOCK>>>(d_a, d_b, d_c); cudaMemcpy(c, d_c, N*sizeof(float), cudaMemcpyDeviceToHost); __global__ void add(float *a, float *b, float *c) { I = blockIdx.x * blockDim.x + threadIdx.x; c[i] = a[i] + b[i];}
28.
© 2017 IBM
Corporation IBM Research - Tokyo Java処理系でのHTMの利用方法 ▪ 特定の処理を行うライブラリを呼ぶ – java.util.concurrentライブラリでの活用 • 複雑なロックフリーアルゴリズムの代わりに、HTMを使用することで実 行パスが単純になり高速化 • IBM Java 8に実装 ▪ 普通にプログラムを書いて、コンパイラが自動的に専用命令を生成する – synchronized block・メソッドの置き換え • synchronized block・メソッドのクリティカルセクションを、HTMで実行す ることで高い並列性が得られる • HTM実行で性能向上が得られない場合は、従来のロックによる実行に 移行 • IBM Java 8、OpenJDKに実装 28
29.
© 2017 IBM
Corporation IBM Research - Tokyo FPGAの利用方法 ▪ 専用命令を使ってプログラミングする – ゲートをGUI・テキストで入力 – 専用のハードウェア記述言語(VHDL、Verilog)で記述 ▪ 特定の処理を行うライブラリを呼ぶ –すでにプログラミングが済んだFPGAを呼び出す • 圧縮、データ処理、ネットワーク処理、など ▪ プログラムを書いて、コンパイラが自動的に専用命令を生成する – C++言語で、ライブラリ・新しい型などを用いてプログラミング(SystemC) • ある程度ハードウェアの知識が必要(信号線専用の変数型、などを利用 している) – ソフトウェアを記述する言語(CやJava)から回路を生成可能 • XILINX社Vivado HLS、など 29
30.
© 2017 IBM
Corporation IBM Research - Tokyo 今日の授業でわかること ▪ ハードウェアアクセラレータの概要について – SIMD – GPGPU – Hardware transactional memory –FPGA ▪ プログラミング言語からハードウェアアクセラレータを使う方法とその利点欠点( SIMDを例に) – プログラマがSIMD命令を書く → 性能は高いが、プログラミングが難しい –プログラマがライブラリを呼ぶ → 性能は高いが、処理が限られる – プログラマが書いたプログラムをコンパイラが変換する → 性能はそこそこだ が、ポータビリティは高い ▪ 深層学習について – どのような処理が内部で行われているか – どのような処理がハードウェアアクセラレータで高速化できるか – プログラミング処理系として、どのような高速化ができるか30
31.
© 2015 IBM
Corporation IBM Research - Tokyo ハードウェアアクセラレータが よく使われる分野の一例 31
32.
© 2017 IBM
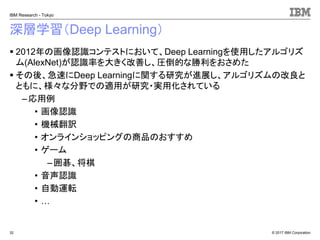
Corporation IBM Research - Tokyo 深層学習(Deep Learning) ▪ 2012年の画像認識コンテストにおいて、Deep Learningを使用したアルゴリズ ム(AlexNet)が認識率を大きく改善し、圧倒的な勝利をおさめた ▪ その後、急速にDeep Learningに関する研究が進展し、アルゴリズムの改良と ともに、様々な分野での適用が研究・実用化されている –応用例 • 画像認識 • 機械翻訳 • オンラインショッピングの商品のおすすめ • ゲーム –囲碁、将棋 • 音声認識 • 自動運転 • … 32
33.
© 2017 IBM
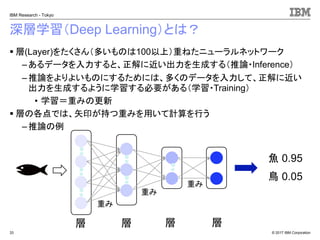
Corporation IBM Research - Tokyo 深層学習(Deep Learning)とは? ▪ 層(Layer)をたくさん(多いものは100以上)重ねたニューラルネットワーク – あるデータを入力すると、正解に近い出力を生成する(推論・Inference) – 推論をよりよいものにするためには、多くのデータを入力して、正解に近い 出力を生成するように学習する必要がある(学習・Training) • 学習=重みの更新 ▪ 層の各点では、矢印が持つ重みを用いて計算を行う – 推論の例 33 魚 0.95 鳥 0.05 層 層 層 層 重み 重み 重み
34.
© 2017 IBM
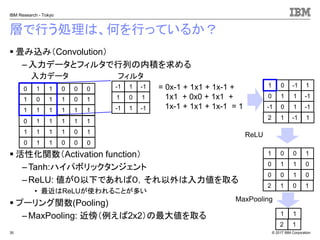
Corporation IBM Research - Tokyo 画像を認識するニューラルネットの例 ▪ LeNet [Yann98]: 0~9の手書き文字の入力の認識 – データに、5x5のフィルタを適用し特徴を抽出した後、データの大きさを減らす • 学習すると、フィルタの値が更新される – 全結合層で1次元のベクタに変換する –最後の層で、0-9に関する確率分布に変換する 34 0 0.01 … 6 0.002 7 0.91 8 0.003 9 0.05 畳み込み 活性化 層 32x32 5x5 28x28を 6種類 プー リング 層 14x14を 6種類 10x10を 16種類 5x5を 16種類5x5 1x120 1x84 1x10 全結合畳み込み 活性化 プー リング 全結合 全結合
35.
© 2017 IBM
Corporation IBM Research - Tokyo 層で行う処理は、何を行っているか? ▪ 畳み込み(Convolution) – 入力データとフィルタで行列の内積を求める ▪ 活性化関数(Activation function) – Tanh:ハイパボリックタンジェント – ReLU: 値が0以下であれば0,それ以外は入力値を取る • 最近はReLUが使われることが多い ▪ プーリング関数(Pooling) – MaxPooling: 近傍(例えば2x2)の最大値を取る 35 0 1 1 0 0 1 0 1 1 0 1 1 1 1 1 0 1 1 1 1 1 1 1 1 0 -1 1 -1 1 0 1 -1 1 -1 = 0x-1 + 1x1 + 1x-1 + 1x1 + 0x0 + 1x1 + 1x-1 + 1x1 + 1x-1 = 1 1 0 -1 0 1 1 -1 0 1 入力データ フィルタ 0 1 1 0 0 0 1 1 1 1 0 1 -1 -1 2 1 -1 1 1 0 0 0 1 1 0 0 1 1 0 0 2 1 0 1 1 1 2 1 ReLU MaxPooling
36.
© 2017 IBM
Corporation IBM Research - Tokyo 層で行う処理は、何を行っているか? ▪ 全結合(Full connection) – 行列ベクトル積を求める 36 0 1 0 0 1 1 1 0 0 0 1 0 1 1 2 0 2 入力データ 重み 0 11 1 0 1 1 0 1 0 1 0 1 1 1 0 1 1x0 + 1x1 + 0x0 + 1x0 + 1x1 + 0x0 = 2
37.
© 2017 IBM
Corporation IBM Research - Tokyo 各処理はどのように記述できるか? ▪ Convolution – 4重ループで、外側2重は並列実行、内側2重は積和演算でリダクション実行可能 ▪ ReLU – 並列実行可能な2重ループで、max()を実行 37 parfor (yo = 0, yi = 1; yi < height-1; yi++, yo++) { parfor (xo = 0, xi = 1; xi < width-1; xi++, xo++) { reducefor (yf = 0; yf < filterHeight; yf++) { reducefor (xf = 0; xf < filterWidth; xf++) { output1[yo][xo] += input[yi + yf – 1][xi + xf – 1] * filter[yf][xf]; }}}} parfor (yi = 0; yi < height; yi++) { parfor (xi = 0; xi < width; xi++) { output2[yi][xi] = max(0, output1[yi][xi]); }} ※実際には、さらに計算量とデータの再利用を増やす変換が行われています(バッチ化)
38.
© 2017 IBM
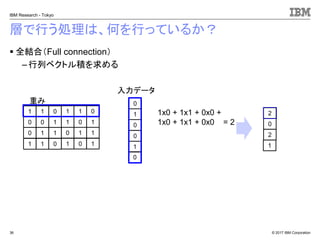
Corporation IBM Research - Tokyo 各処理はどのように記述できるか? ▪ MaxPooling – 4重ループで、外側2重は並列実行、内側2重は最大値を求めるリダクション実行可能 ▪ Full connection – 2重ループで、外側は並列実行、内側は積和演算でリダクション実行可能 38 parfor (yo = 0; yo < height; yo++) { reducefor (xf = 0; xf < weightWidth; yf++) { output[yo] += weight[yo][xf] * input[xf]; }} ※実際には、さらに計算量とデータの再利用を増やす変換が行われています(バッチ化) parfor (yi = 0, yo = 0; yi < height; yi += poolHeight, yo++) { parfor (xi = 0, xo = 0; xi < width; xi += poolWidth, xo++) { reducefor (maxval = -INF, yp = 0; yp < poolHeight; yp++) { reducefor (xp = 0; xp < poolWidth; xp++) { maxval = max(output2[yi+yp][xi+xp], maxval); }} output3[yo][xo] = maxval; }}
39.
© 2017 IBM
Corporation IBM Research - Tokyo ハードウェアアクセラレータとの親和性 ▪ Convolution – 4重ループで、外側2重は並列実行、内側2重は積和演算でリダクション実行可能 ▪ ReLu – 並列実行可能な2重ループで、max()を実行 ▪ MaxPooling – 4重ループで、外側2重は並列実行、内側2重は最大値を求めるリダクション実行可能 ▪ Full connection – 2重ループで、外側は並列実行、内側は積和演算でリダクション実行可能 39 比較的決まった処理で、並列処理が多いので ハードウェアアクセラレータ向き 特に、計算量の多いConvolutionを高速化したい
40.
© 2017 IBM
Corporation IBM Research - Tokyo どんなハードウェアアクセラレータが使われている? ▪ SIMD – 行列演算の高速化は得意 ▪ GPGPU – NVIDIAのVoltaは、16bit浮動小数点行列演算専用回路を搭載 ▪ Deep Learning専用プロセッサ – Tensor Processing Unit2 (TPU2), (Google) • 低精度浮動小数点行列演算とactivation functionを高速に実行する – Nervana (Intel) –Lightspeeur 2810S (Gyrfalcon technology) – など 40
41.
© 2017 IBM
Corporation IBM Research - Tokyo ニューラルネットを記述して、実行する方法は? ▪ 深層学習用のフレームワークを用いて、ニューラルネットを記述する – Caffe (UC Berkley), http://caffe.berkeleyvision.org/ – TensorFlow (Google), https://www.tensorflow.org/ – PyTorch (Facebook), http://pytorch.org/ –Chainer (PFN), https://chainer.org/ – MXNet (U of Washington, CMU, Amazon), https://mxnet.incubator.apache.org/ – NNabla (Sony), https://nnabla.org/ –などなど ▪ これらのフレームワークは、ハードウェアアクセラレータが用意している専用ラ イブラリを呼ぶ – Convolution、などの代表的な演算を高速化するライブラリ • cuDNN by NVIDIA • Math Kernel Library for Deep Neural Networks (MKL-DNN) by Intel 41
42.
© 2017 IBM
Corporation IBM Research - Tokyo さらに高速化できないか? ▪ フレームワークで書かれたニューラルネットワーク構造は、プログラムとみなす ことができる – フレームワークによっては、Pythonで記述する ▪ 専用コンパイラで最適化を適用してコンパイルして、アクセラレータ命令を呼ぶ コードを生成することで高速化を図る – TensorFlow XLA – TVM/NNVM – PraidML – PyTorch42 import tensorflow as tf with tf.name_scope('conv1'): w_tensor = tf.variable(...) b_tensor = tf.variable(...) c_tensor = tf.nn.conv2d(x_image, w_tensor, strides=...) t_tensor = c_tensor + b_tensor h_tensor = tf.nn.relu(t_tensor)
43.
© 2017 IBM
Corporation IBM Research - Tokyo TensorFlow XLA 43 Source: https://autodiff-workshop.github.io/slides/JeffDean.pdf ▪ HLO: 命令融合、共通式削除、などを行う ▪ LLO: 対象のアーキテクチャ独自の最適化を行う(実装はLLVMを使っている) ▪ Executor API: 各処理(例:conv2d, ReLU)を実行する
44.
© 2017 IBM
Corporation IBM Research - Tokyo NNVM/TVM ▪ NNVM: グラフ上での最適化を行う – ノードの融合、など ▪ TVM: Tensorに関する最適化を行う – Tensor計算の融合、など 44 Source: http://www.tvmlang.org/2017/10/06/nnvm-compiler-announcement.html
45.
© 2017 IBM
Corporation IBM Research - Tokyo 最後におまけ ▪ AIやDeep Learningが流行って、言語処理の研究分野は廃れていくのか? 45
46.
© 2017 IBM
Corporation IBM Research - Tokyo 最後におまけ ▪ AIやDeep Learningが流行って、言語処理の研究分野は廃れていくのか? – そんなことはないです。 “言語処理系屋さん”、”コンパイラ屋さん”、には”需要”があります。 その時代に重要なワークロードがあれば、それを高速化する命令やアクセ ラレータが開発されるでしょう。 使う人の裾野が広がれば、生産性を高めるための専用言語やフレームワ ークが開発されます。 そして、人はわがままなので、生産性を高めるだけでなく高速化したい、と 言い出します。 こういう要求によりよく答えるために、言語設計や最適化コンパイラの研究 は続いていくと思っています。 46
47.
© 2017 IBM
Corporation IBM Research - Tokyo 今日の授業でわかること ▪ ハードウェアアクセラレータの概要について – SIMD – GPGPU – Hardware transactional memory –FPGA ▪ プログラミング言語からハードウェアアクセラレータを使う方法とその利点欠点 – プログラマがSIMD命令を書く – プログラマがライブラリを呼ぶ –プログラマが書いたプログラムをコンパイラが変換する ▪ 深層学習について – どのような処理が内部で行われているか → 行列演算 – どのような処理がハードウェアアクセラレータで高速化できるか → 浮動小数 点の行列演算 – プログラミング処理系として、どのような高速化ができるか → コンパイラ最 適化47
48.
© 2017 IBM
Corporation IBM Research - Tokyo 今日の授業のまとめ ▪ ハードウェアアクセラレータの概要について – SIMD – GPGPU – Hardware transactional memory –FPGA ▪ プログラミング言語からハードウェアアクセラレータを使う方法とその利点欠点( SIMDを例に) – プログラマが命令を書く –プログラマがライブラリを呼ぶ – プログラマが書いたプログラムをコンパイラが変換する ▪ 深層学習について – どのような処理が内部で行われているか –どのような処理がハードウェアアクセラレータで高速化できるか – プログラミング処理系として、どのような高速化ができるか 48
Download

![© 2017 IBM Corporation
IBM Research - Tokyo
SIMD組み込み関数によるプログラム例
16
for (i = 0; i < N; i += 8) {
__m256i v1 = _mm256_loadu_si256((__m256i *)(a+i));
__m256i v2 = _mm256_loadu_si256((__m256i *)(b+i));
__m256i v3 = _mm256_add_epi32(v1, v2);
_mm256_storeu_si256((__m256i *)(c+i), v3); }
for (i = 0; i < N; i++) c[i] = a[i] + b[i];
for (i = 0; i < N; i += 4) {
vector int v1 = vec_ld(0, a+i);
vector int v2 = vec_ld(0, b+i);
vector int v3 = vec_add(v1, v2);
vec_st(v3, 0, c+i); }
元のスカラループ
AVX2用組み込み関数を使った例
VMX用組み込み関数を使った例
8 (= 256 / 32)要素を同時に処理
32-bit整数配列
4 (= 128 / 32)を同時に処理
vec_add() isはSIMDのadd命令に対応する
vector int は4つの32-bit整数値を持つ
ベクタレジスタ](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-16-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
SIMD命令を使うライブラリによるプログラム例
18
// c = αAB + βC を計算する
cblas_dgemm(CblasRowMajor, CblasNoTrans, CblasNoTrans,
N, N, N,
1.0, A, N,
B, N,
0.0, C, N);
for (i = 0; i < N; i++)
for (j = 0; j < N; j++)
for (k = 0; k < N; k++)
C[i*N + j] += A[i*N + k] * B[k*N + j];
元のスカラループ
行列積を計算するライブラリを使った例](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-18-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
コンパイラによる自動SIMD命令生成のプログラム例
▪ コンパイラが行う解析
– 入力と出力の配列が、同じメモリアドレスをアクセスしていないか?
Loop-carried dependenceの存在確認
– メモリアクセスが、キャッシュ境界からずれていないか?
• キャッシュ境界からずれた部分を処理する、非SIMDコードを生成する
– ループを繰り返し実行する回数N、はベクタ長の倍数か?
• 倍数でない可能性があるときは、端数を処理する非SIMDコードを生成
する
21
元のスカラループ
for (i = S; i < E; i++) c[i] = a[i] + b[i];](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-21-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
コンパイラの解析を助ける方法
▪ アルゴリズムやデータ配置の変更
– アルゴリズム
• 例:SOR → Red-black SOR
– データ配置
• 例:Array of structs(AOS) → Struct of arrays(SOA)
▪ プログラムの性質の保証
– “restrict” keyword of C99
• ある配列変数が、他の変数とエイリアスしないことを保証する
– Pragmaを用いた、SIMDを使用する宣言
22
void func(double *restrict a, double *restrict b, double *restrict c)
{ /* 配列a[], b[], and c[]はこの関数の中で異なるアドレスであることを保証 */ }
#pragma omp simd (OpenMP 4.0)
#pragma simd (icc)
#pragma disjoint (xlc)](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-22-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
AOSとSOA
▪ データ配置の変更は、非効率な非連続メモリアクセスをなくしたSIMD命令実行
のために、重要であることが多い
– コンパイラは、このようなデータ配置の変更は容易ではない
23
y0 z0x0 y1 z1x1 y2 z2x2 y3 z3x3
x0 x1 x2 x3
y4 z4x4
x4 y0 y1 y2 y3 y4 z0 z1 z2 z3 z4
Array of Structures (AOS)
Structure of arrays (SOA)
y5x5
(4-wayのSIMDを仮定)
struct _AOS { double x, y, z; }
struct _AOS aos[N];
struct _SOA { double x[N], y[N], z[N]; }
struct _SOA soa;
x0 x1 x2 x3 x4y0 y1 y2 y3 z0 z1 z2 z3
Hybrid
x5 x6 x7 y4
struct _HYBRID { double x[4], y[4], z[4]; }
struct _HYBRID hybrid[N/4];](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-23-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
コンパイラによる自動SIMD命令生成でプログラミングする利点欠点
☺ソースコードをSIMD専用に変更する必要がない
SIMD組み込み関数、ライブラリを使った場合ほどの性能向上が得られないこ
とが多い
24
[1] Maleki et al. “An Evaluation of Vectorizing Compilers”, PACT 2011
on POWER7 on Nehalem
ベンチマークプログラムのSIMD無し実行に対する、平均性能向上比[1]
XLC ICC GCC
プログラムの変更なしに自動SIMD命令生成 1.66 1.84 1.58
プログラムを手で変換後、自動SIMD命令生成 2.97 2.38 N/A
SIMD組み込み関数で記述 3.15 2.45 N/A](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-24-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
Java処理系でのSIMD命令利用方法
▪ 単純ループのコンパイラによる自動SIMD変換
• 複雑なループも技術的には変換可能だが、動的コンパイラでは時間が
かかる解析を行うことは難しい
– 行列積、行列ベクトル積を行うループなどは変換可能
–演算対象が一次元のprimitive type配列であること
– IBM Java 8、Open JDK 8/9に実装
▪ Javaクラスライブラリでの活用
– ループ処理が多いライブラリで使用
• java/lang/String, Java/util/Arrays, String encoding converter
• IBM Java 8に実装
▪ SIMD組み込み関数
– Vector APIとして議論中
25
for (int i = 0; i < C.length; i++) {
C[i] = A[i] + B[i];
}
FloatVector.FloatSpecies<Shapes.S256Bit> species =
(FloatVector.FloatSpecies<Shapes.S256Bit>)
Vector.speciesInstance(Float.class, Shapes.S_256_BIT);
void add(float[] A, float [] B, float [] C) {
FloatVector<Shapes.S256Bit> a, b, c;
a = species.fromArray(A, 0);
b = species.fromArray(B, 0);
c = a.add(b);
c.intoArray(C, 0); }
元のスカラループ
提案中の組み込み関数を使った例
https://software.intel.com/en-us/articles/vector-api-developer-program-for-java](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-25-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
GPGPUの利用方法
▪ 専用命令を使ってプログラミングする
– GPGPUメーカーが用意したアセンブリ言語、専用関数でプログラムを書く
• PTX(NVIDIA)、GCN(AMD)
▪ 特定の処理を行うライブラリを呼ぶ
–cuBLAS、などの行列演算
• プログラマがアセンブラで書くより速いことが多い
▪ 普通にプログラムを書いて、コンパイラが自動的に専用命令を生成する
– ホスト-アクセラレータ間の処理などは自分で書く(例:CUDA, OpenCL)
–コンパイラが自動でコードを生成する(例:OpenACC, OpenMP)
27
#pragma acc parallel loop
for (i = 0; i < N; i++) c[i] = a[i] + b[i];
cudaMalloc(&d_a, N*sizeof(float)); cudaMemcpy(d_a, a, N*sizeof(float), cudaMemcpyHostToDevice)
...
add<<GRID, BLOCK>>>(d_a, d_b, d_c);
cudaMemcpy(c, d_c, N*sizeof(float), cudaMemcpyDeviceToHost);
__global__ void add(float *a, float *b, float *c) {
I = blockIdx.x * blockDim.x + threadIdx.x;
c[i] = a[i] + b[i];}](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-27-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
画像を認識するニューラルネットの例
▪ LeNet [Yann98]: 0~9の手書き文字の入力の認識
– データに、5x5のフィルタを適用し特徴を抽出した後、データの大きさを減らす
• 学習すると、フィルタの値が更新される
– 全結合層で1次元のベクタに変換する
–最後の層で、0-9に関する確率分布に変換する
34
0 0.01
…
6 0.002
7 0.91
8 0.003
9 0.05
畳み込み
活性化
層
32x32
5x5
28x28を
6種類
プー
リング
層
14x14を
6種類
10x10を
16種類
5x5を
16種類5x5
1x120
1x84
1x10
全結合畳み込み
活性化
プー
リング 全結合
全結合](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-34-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
各処理はどのように記述できるか?
▪ Convolution
– 4重ループで、外側2重は並列実行、内側2重は積和演算でリダクション実行可能
▪ ReLU
– 並列実行可能な2重ループで、max()を実行
37
parfor (yo = 0, yi = 1; yi < height-1; yi++, yo++) {
parfor (xo = 0, xi = 1; xi < width-1; xi++, xo++) {
reducefor (yf = 0; yf < filterHeight; yf++) {
reducefor (xf = 0; xf < filterWidth; xf++) {
output1[yo][xo] +=
input[yi + yf – 1][xi + xf – 1] * filter[yf][xf];
}}}}
parfor (yi = 0; yi < height; yi++) {
parfor (xi = 0; xi < width; xi++) {
output2[yi][xi] = max(0, output1[yi][xi]);
}}
※実際には、さらに計算量とデータの再利用を増やす変換が行われています(バッチ化)](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-37-320.jpg)
![© 2017 IBM Corporation
IBM Research - Tokyo
各処理はどのように記述できるか?
▪ MaxPooling
– 4重ループで、外側2重は並列実行、内側2重は最大値を求めるリダクション実行可能
▪ Full connection
– 2重ループで、外側は並列実行、内側は積和演算でリダクション実行可能
38
parfor (yo = 0; yo < height; yo++) {
reducefor (xf = 0; xf < weightWidth; yf++) {
output[yo] += weight[yo][xf] * input[xf];
}}
※実際には、さらに計算量とデータの再利用を増やす変換が行われています(バッチ化)
parfor (yi = 0, yo = 0; yi < height; yi += poolHeight, yo++) {
parfor (xi = 0, xo = 0; xi < width; xi += poolWidth, xo++) {
reducefor (maxval = -INF, yp = 0; yp < poolHeight; yp++) {
reducefor (xp = 0; xp < poolWidth; xp++) {
maxval = max(output2[yi+yp][xi+xp], maxval);
}}
output3[yo][xo] = maxval;
}}](https://image.slidesharecdn.com/20180109titechlectureishizakipublic-180112071837/85/20180109-titech-lecture_ishizaki_public-38-320.jpg)