Download to read offline

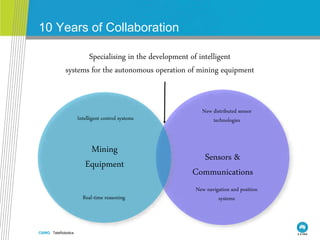
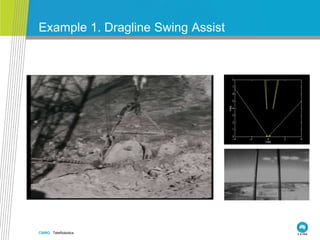
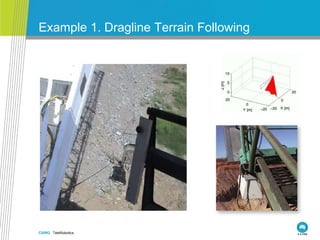
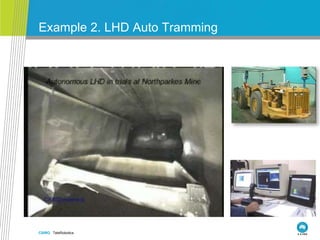
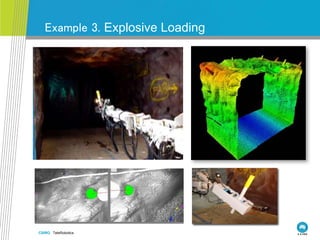

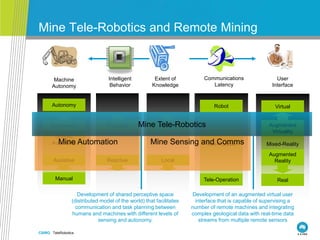



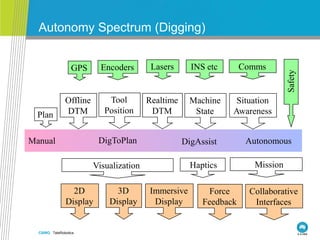
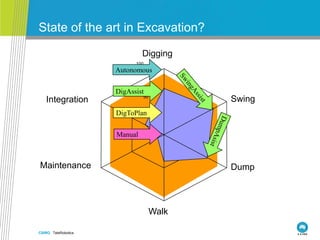


This document discusses remote mining and CSIRO's research into mining automation and teleoperation technologies. It describes CSIRO's work developing intelligent systems for autonomous operation of mining equipment, including examples of dragline swing assist, terrain following, auto tramming, and explosive loading systems. The document outlines CSIRO's focus on improving safety, productivity, and equipment utilization through mixed-reality teleoperation, shared autonomy between humans and machines, distributed sensing networks, and augmented virtual control room interfaces.









































































