Download to read offline



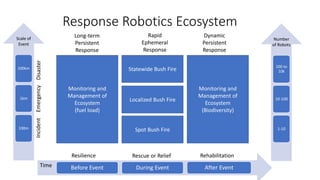
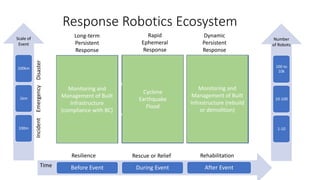



This document discusses the use of response robots for bushfire management in Australia. It outlines how robots could be used before, during, and after bushfire events at different scales from localized fires to statewide fires. Robots would need to operate in unstructured and hostile environments without infrastructure and be reconfigurable, redeployable, and resilient. The document presents a scenario of using multiple robots to map a forest to both monitor fuel load and biodiversity. It concludes that robots should help rather than replace workers, use off-the-shelf technologies when possible, not be stockpiled, be redeployable, reconfigurable, and resilient or redundant.














































