Download to read offline




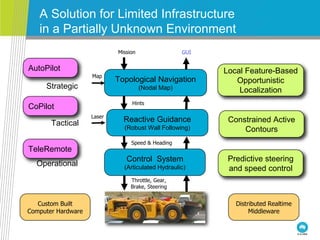
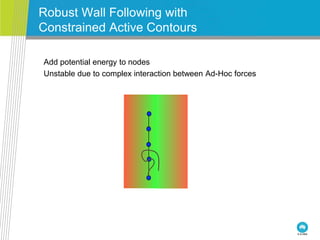
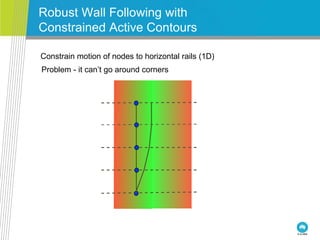
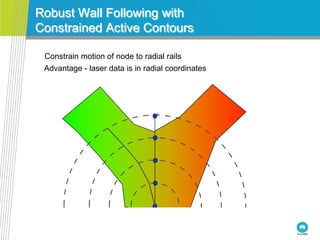
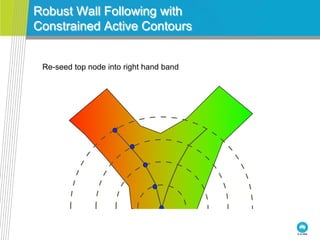
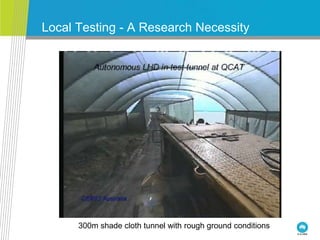

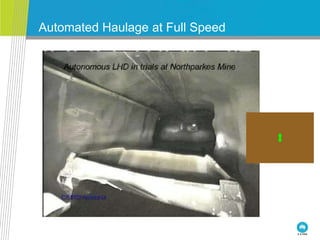
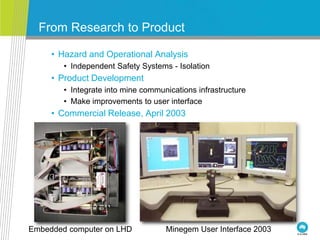

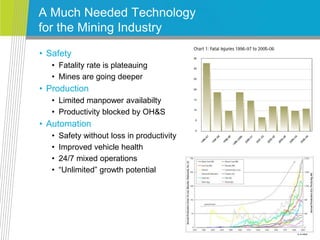


The document summarizes research into developing an autonomous underground loader that can operate without extensive infrastructure in hazardous underground mine environments. A consortium was formed in 1998 to build a research prototype over 12 months for $1.6 million Australian dollars. The prototype uses opportunistic localization and topological navigation with robust wall following using constrained active contours to safely guide the loader. Local testing and field tests at an operating mine were successful. The technology was commercialized in 2003 and is now used by several major mining companies, improving safety and productivity while reducing costs. The research has had a significant impact on the mining industry through automating existing vehicle fleets.




































































![Getting Started with Apache Spark: Big Data Made Simple [Free Meetup]](https://cdn.slidesharecdn.com/ss_thumbnails/apachesparkgettingstarted-260203175547-8361bcc3-thumbnail.jpg?width=640&height=640&fit=bounds)

















