Downloaded 149 times

![Adjacency matrix (Ag), with respect to this listing of
the vertices, is the n x n zero-one matrix with 1 as its
(i, j)th entry when vi and vj are adjacent, and 0 as its
(i, j) entry when they are not adjacent. In other words,
if its adjacency matrix is A = [aij], then
1
aij =
0
a
c
If {vi, vj} is an edge of G,
otherwise.
0
b
1
1
d
1
1
0
1
0
1
1
0
0
1
0
0
0
a
d
0
b
1
1
c
0
1
0
0
1
1
0
0
1
0
1
1
0](https://image.slidesharecdn.com/graphtheory-131025083802-phpapp01/85/Graph-theory-13-320.jpg)
![Incidence matrices – Let G = (V, E) be an
undirected graph. Suppose that v1, v2, …, vn are the
vertices and e1, e2, …., em are the edges of G. Then
the incidence matrix with respect to this ordering of V
and E is the n x m matrix M = [mij], where
1
mij =
0
v1
e1
v4
e3
e2
when edge ej is incident with vi,
otherwise.
v 2 e6
e4
v5
v3
e5
1
0
0
1
0
1 0 0 0 0
0 1 1 0 1
0 0 0 1 1
0 1 0 0 0
1 0 1 1 0
](https://image.slidesharecdn.com/graphtheory-131025083802-phpapp01/85/Graph-theory-15-320.jpg)
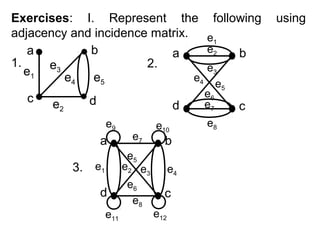
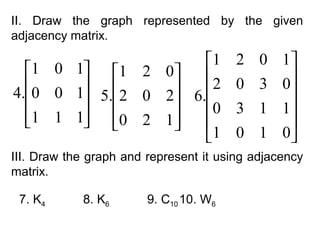
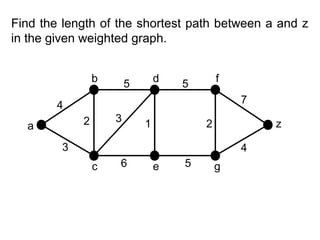
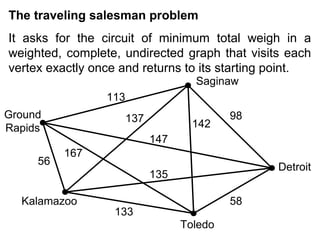
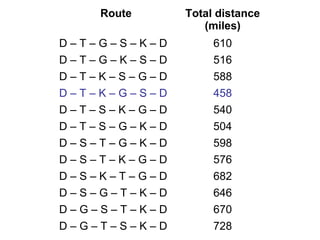
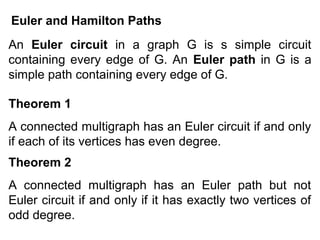
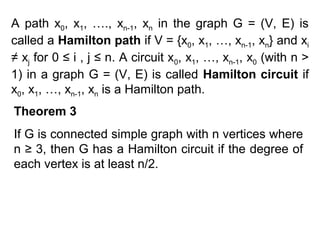
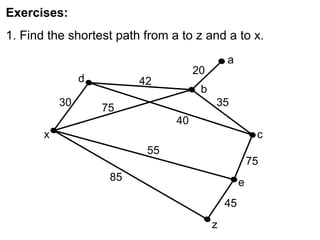
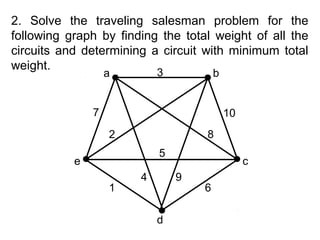

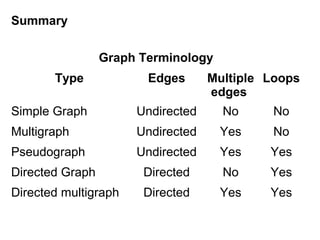
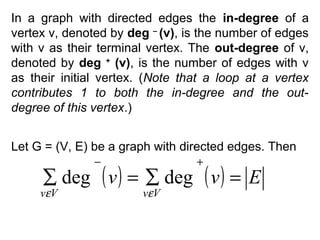
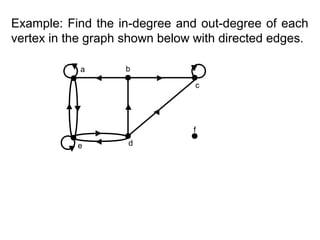
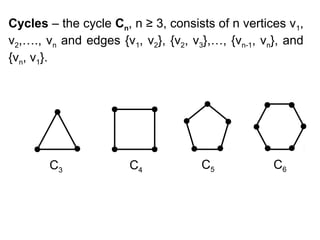
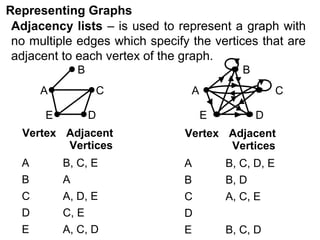
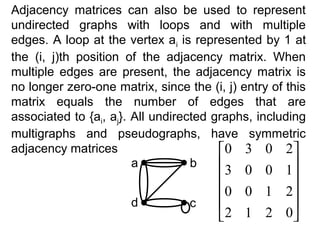
The document discusses various graph theory concepts including: - Types of graphs such as simple graphs, multigraphs, pseudographs, directed graphs, and directed multigraphs which differ based on allowed edge connections. - Graph terminology including vertices, edges, degrees, adjacency, incidence, paths, cycles, and representations using adjacency lists and matrices. - Weighted graphs and algorithms for finding shortest paths such as Dijkstra's algorithm. - Euler and Hamilton paths/circuits and conditions for their existence. - The traveling salesman problem of finding the shortest circuit visiting all vertices.