The seven bridgesof
Konigsberg
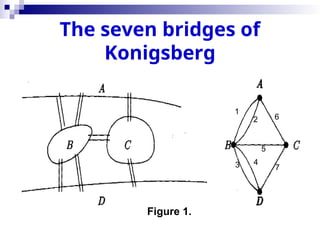
Problem 1: The City of Konigsberg (in the early
eighteenth century) comprises the river banks A
and D and the islands B and C. These four land
areas are connected by seven bridges. Could a
Konigsbergian take a walk through the city passing
over each bridge exactly once and return home?
In 1736, Euler, while at St. Petersburg Academy,
published a solution to the problem: No such walk
is possible. (Figure 1.)
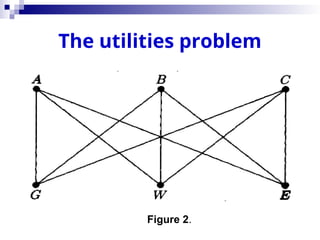
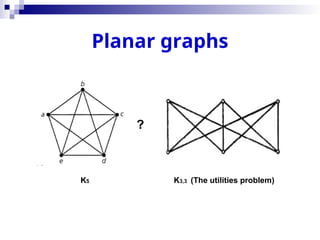
The utilities problem
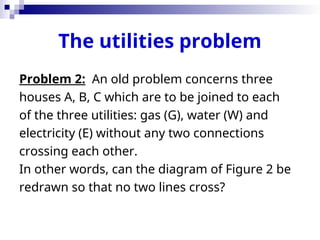
Problem2: An old problem concerns three
houses А, В, С which are to be joined to each
of the three utilities: gas (G), water (W) and
electricity (E) without any two connections
crossing each other.
In other words, can the diagram of Figure 2 be
redrawn so that no two lines cross?
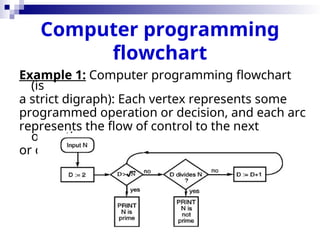
Computer programming
flowchart
Example 1:Computer programming flowchart
(is
a strict digraph): Each vertex represents some
programmed operation or decision, and each arc
represents the flow of control to the next
operation
or decision.
7.
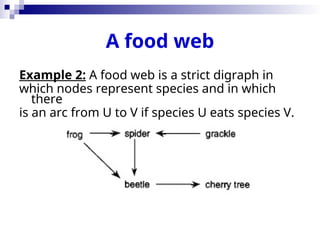
A food web
Example2: A food web is a strict digraph in
which nodes represent species and in which
there
is an arc from U to V if species U eats species V.
8.
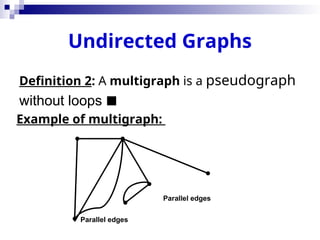
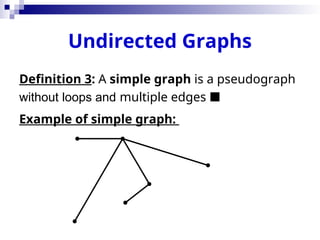
Undirected Graphs
Definition 1:A pseudograph (or undirected
graph) G is the ordered pair G=(V,E) of two sets:
a nonempty finite set V, which elements called
vertices (or nodes) and a set E, which elements
called edges (or arcs). In case of pseudograph,
set E is the domain of any function F from E to
the set of unordered pairs:
, | ,
u v u v V
9.
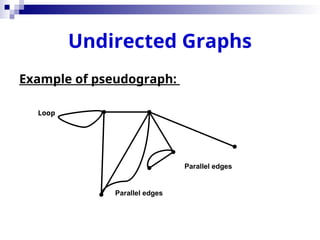
Undirected Graphs
An edgeis a loop if .
The edges are multiple (or parallel)
edges if
Geometrically, vertices are represented by
points and the edges by lines (not necessarily
straight) joining pairs of points.
,
F e u u
e E
1 2
e and e
1 2
F e F e
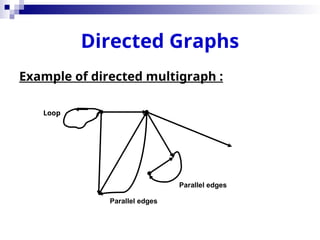
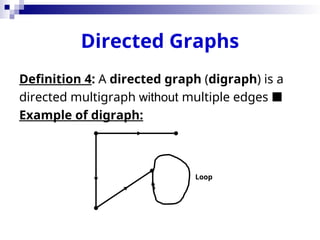
Directed Graphs
Definition 4:A directed multigraph G is the
ordered pair G=(V,E) of two sets: a nonempty
finite set V, which elements called vertices (or
nodes) and a set E, which elements called
directed edges (or arcs). In case of directed
multigraph, set E is the domain of any function
F from E to the set of ordered pairs:
, | ,
u v u v V
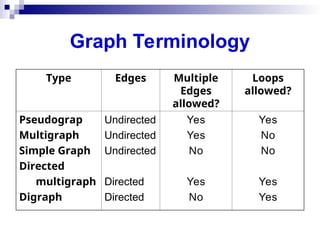
Graph Terminology
Type EdgesMultiple
Edges
allowed?
Loops
allowed?
Pseudograp
Multigraph
Simple Graph
Directed
multigraph
Digraph
Undirected
Undirected
Undirected
Directed
Directed
Yes
Yes
No
Yes
No
Yes
No
No
Yes
Yes
18.
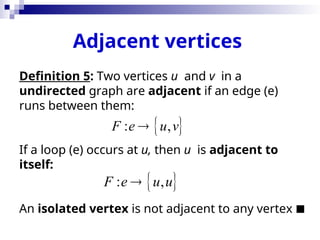
Adjacent vertices
Definition 5:Two vertices u and v in a
undirected graph are adjacent if an edge (e)
runs between them:
If a loop (e) occurs at u, then u is adjacent to
itself:
An isolated vertex is not adjacent to any vertex
: ,
F e u v
: ,
F e u u
19.
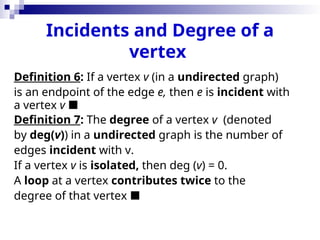
Incidents and Degreeof a
vertex
Definition 6: If a vertex v (in a undirected graph)
is an endpoint of the edge e, then e is incident with
a vertex v
Definition 7: The degree of a vertex v (denoted
by deg(v)) in a undirected graph is the number of
edges incident with v.
If a vertex v is isolated, then deg (v) = 0.
A loop at a vertex contributes twice to the
degree of that vertex
20.
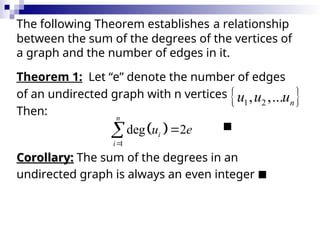
The following Theoremestablishes a relationship
between the sum of the degrees of the vertices of
a graph and the number of edges in it.
Theorem 1: Let “e” denote the number of edges
of an undirected graph with n vertices
Then:
Corollary:
Corollary: The sum of the degrees in an
undirected graph is always an even integer
1 2
, ,... n
u u u
1
deg 2
n
i
i
u e
21.
Example 3: Isa graph with four vertices
a,b,c,d, with deg(a) = 4, deg(b)=deg(d)=5,
and deg(c)= 2 possible? The same problem,
bat deg(b)=6?
Theorem 2: The number of odd degree vertices
in an undirected graph is an even integer
For example, the Konigsberg model in Figure
1
contains four vertices of odd degree.
22.
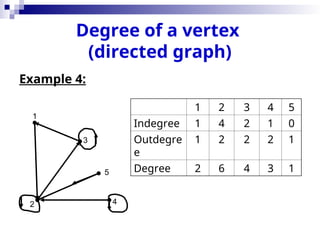
Degree of avertex
(directed graph)
Definition 8: The indegree of a vertex v
(denoted by indeg(v)) in a directed multigraph
is the number of directed edges terminating at v.
The outdegree of a vertex v (denoted by
outdeg(v)) in a directed multigraph is the
number of directed edges leaving v.
The degree of v, or deg(v), is the sum of its
indegree and outdegree:
deg deg deg
v in v out v
1 2
,,... n
u u u
Theorem 3: Let “e” denote the number of
edges of a directed multigraph with “n”
vertices , Then:
1 1
deg deg
n n
i i
i i
in u out u e
Degree of a vertex
(directed graph)
1
deg 2
n
i
i
u e
25.
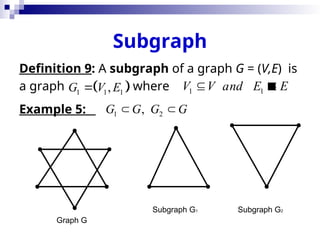
Subgraph
Definition 9: Asubgraph of a graph G = (V,E) is
a graph , where
Example 5:
1 1 1
,
G V E
1 1
V V and E E
Graph G
Subgraph G1 Subgraph G2
1 2
,
G G G G
26.
Union of SimpleGraphs
Definition 10: The union of two simple graphs
is the simple graph , where:
it is denoted by
1 1 1 2 2 2
, ,
G V E and G V E
,
G V E
1 2 1 2
V V V and E E E
1 2
G G G
27.
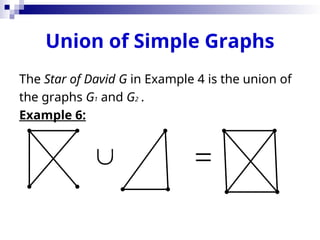
Union of SimpleGraphs
The Star of David G in Example 4 is the union of
the graphs G1 and G2 .
Example 6:
28.
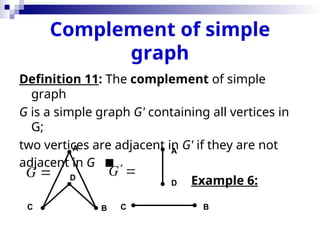
Complement of simple
graph
Definition11: The complement of simple
graph
G is a simple graph G' containing all vertices in
G;
two vertices are adjacent in G' if they are not
adjacent in G
Example 6:
A A
B B
C C
D
D
G G
29.
Adjacency matrix
Definition 12:The adjacency matrix of a
undirected graph with n vertices
is an matrix , where
= number of edges from
Because every edge in a graph is undirected, for
every i and j: , so the adjacency matrix
of every undirected graph is symmetric.
1 2
, ,... n
u u u
n n
,
i j
A a
,
i j
a
i j
u to u
, ,
i j j i
a a
30.
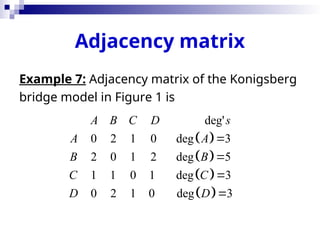
Adjacency matrix
Example 7:Adjacency matrix of the Konigsberg
bridge model in Figure 1 is
deg'
0 2 1 0 deg 3
2 0 1 2 deg 5
1 1 0 1 deg 3
0 2 1 0 deg 3
A B C D s
A A
B B
C C
D D
31.
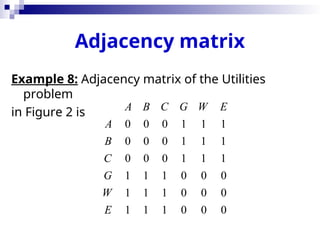
Adjacency matrix
Example 8:Adjacency matrix of the Utilities
problem
in Figure 2 is
0 0 0 1 1 1
0 0 0 1 1 1
0 0 0 1 1 1
1 1 1 0 0 0
1 1 1 0 0 0
1 1 1 0 0 0
A B C G W E
A
B
C
G
W
E
32.
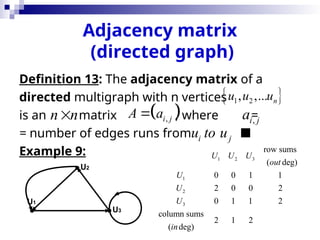
Adjacency matrix
(directed graph)
Definition13: The adjacency matrix of a
directed multigraph with n vertices
is an matrix , where =
= number of edges runs from
Example 9:
1 2
, ,... n
u u u
n n
,
i j
A a
,
i j
a
i j
u to u
U1
U2
U3
1 2 3
1
2
3
row sums
( deg)
0 0 1 1
2 0 0 2
0 1 1 2
column sums
2 1 2
( deg)
U U U
out
U
U
U
in
33.
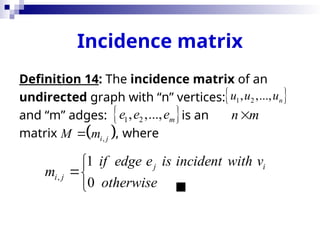
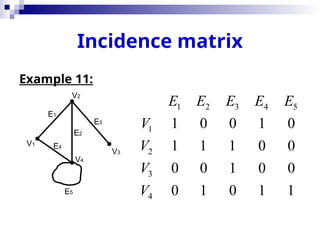
Incidence matrix
Definition 14:The incidence matrix of an
undirected graph with “n” vertices:
and “m” adges: is an
matrix , where
1 2
, ,..., n
u u u
1 2
, ,..., m
e e e n m
,
i j
M m
,
1
0
j i
i j
if edge e is incident with v
m
otherwise
34.
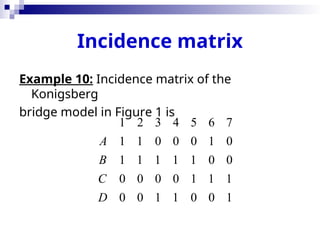
Incidence matrix
Example 10:Incidence matrix of the
Konigsberg
bridge model in Figure 1 is
1 2 3 4 5 6 7
1 1 0 0 0 1 0
1 1 1 1 1 0 0
0 0 0 0 1 1 1
0 0 1 1 0 0 1
A
B
C
D
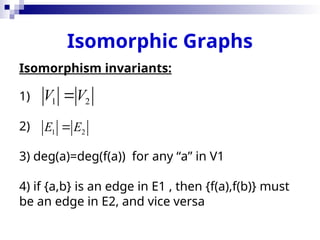
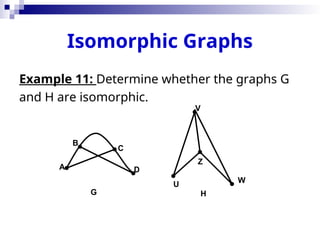
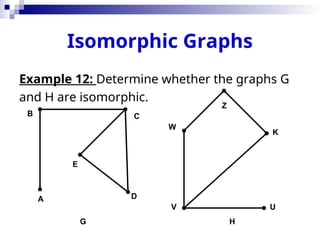
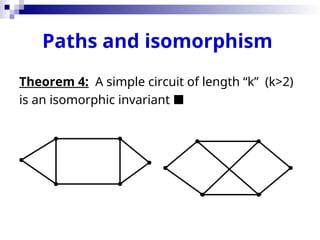
Isomorphic Graphs
Definition 15:Two simple graphs, G1 = (V1,E1)
and G2 = (V2,E2) are isomorphic if a bijection
exists such that {a, b} is an edge in E1 if and only
if {f(a),f(b)} is an edge in E2, for any two elements
a and b in V1. The function “f” is an isomorphism
between G1 and G1
1 2
:
f V V
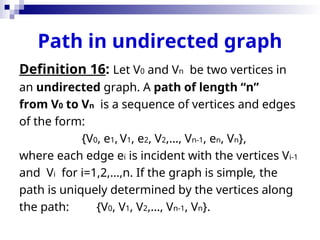
Path in undirectedgraph
Definition 16: Let V0 and Vn be two vertices in
an undirected graph. A path of length “n”
from V0 to Vn is a sequence of vertices and edges
of the form:
{V0, e1, V1, e2, V2,…, Vn-1, en, Vn},
where each edge ei is incident with the vertices Vi-1
and Vi for i=1,2,…,n. If the graph is simple, the
path is uniquely determined by the vertices along
the path: {V0, V1, V2,…, Vn-1, Vn}.
41.
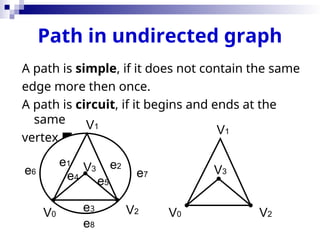
Path in undirectedgraph
A path is simple, if it does not contain the same
edge more then once.
A path is circuit, if it begins and ends at the
same
vertex
eee
V1
V0 V2
V3
V2
V1
V0
V3
e1 e2
e3
e4
e5
e7
e6
e8
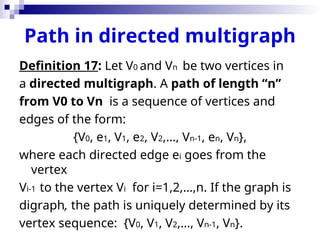
Path in directedmultigraph
Definition 17: Let V0 and Vn be two vertices in
a directed multigraph. A path of length “n”
from V0 to Vn is a sequence of vertices and
edges of the form:
{V0, e1, V1, e2, V2,…, Vn-1, en, Vn},
where each directed edge ei goes from the
vertex
Vi-1 to the vertex Vi for i=1,2,…,n. If the graph is
digraph, the path is uniquely determined by its
vertex sequence: {V0, V1, V2,…, Vn-1, Vn}.
44.
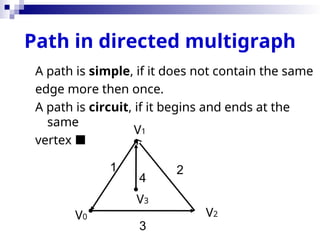
Path in directedmultigraph
A path is simple, if it does not contain the same
edge more then once.
A path is circuit, if it begins and ends at the
same
vertex
V0
V1
V2
V3
1 2
3
4
45.
Connectedness
Definition 18: Anundirected graph is
connected if there is a path between every two
distinct vertices of the graph; otherwise, it is
disconnected
Theorem 5: There is a simple path between any
two distinct vertices in a connected graph
46.
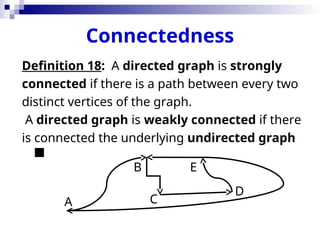
Connectedness
Definition 18: Adirected graph is strongly
connected if there is a path between every two
distinct vertices of the graph.
A directed graph is weakly connected if there
is connected the underlying undirected graph
A
B
C
D
E
47.
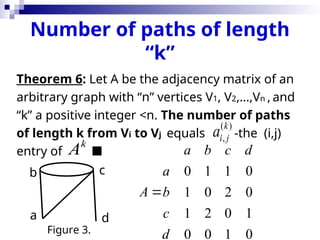
Number of pathsof length
“k”
Theorem 6: Let A be the adjacency matrix of an
arbitrary graph with “n” vertices V1, V2,…,Vn , and
“k” a positive integer <n. The number of paths
of length k from Vi to Vj equals -the (i,j)
entry of
( )
,
k
i j
a
k
A
a
b c
d
0 1 1 0
1 0 2 0
1 2 0 1
0 0 1 0
a b c d
a
A b
c
d
Figure 3.
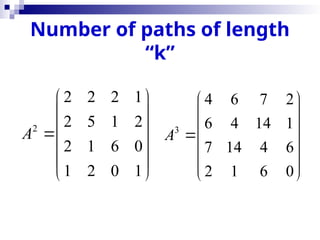
Number of pathsof length
“k”
Theorem 7: Let A be the adjacency matrix of a
graph with n vertices and k a positive integer < n.
The (i,j)-th entry of the matrix
gives the number of paths of length k from
vertex Vi to vertex Vj
2
... k
A A A
50.
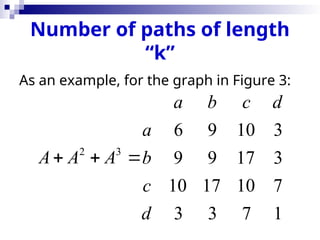
Number of pathsof length
“k”
As an example, for the graph in Figure 3:
2 3
6 9 10 3
9 9 17 3
10 17 10 7
3 3 7 1
a b c d
a
A A A b
c
d
51.
Number of pathsof length “k”
How Theorem 6 can be used:
1) To determine whether a graph is
connected?
2) To find the length of the shortest path
between two vertices?
52.
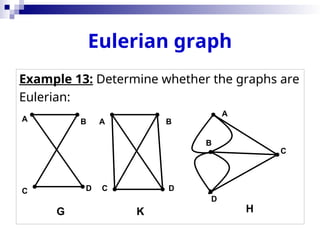
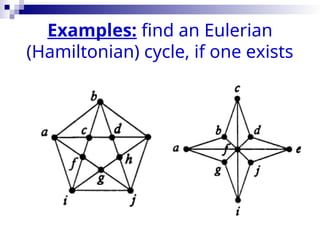
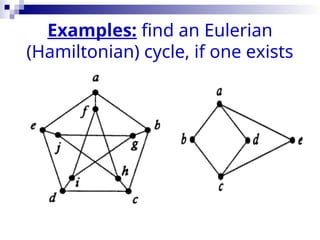
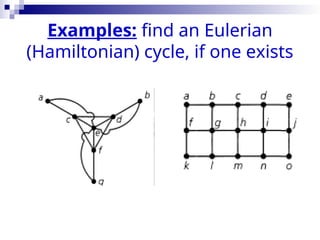
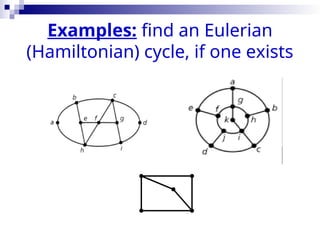
Eulerian graph
Definition 19:An Eulerian path in a graph G is a
simple path, containing every edge of G.
An Eulerian circuit in a graph G is a simple circuit,
containing every edge of G.
A graph with an Eulerian circuit is an Eulerian
graph
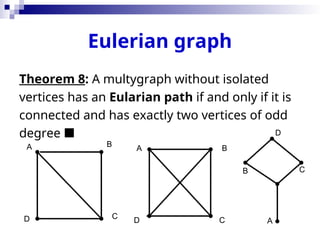
Theorem 8: A multygraph without isolated vertices
has an Eularian circuit if and only if it is connected
and each of its vertices has even degree
Eulerian graph
Theorem 8:A multygraph without isolated
vertices has an Eularian path if and only if it is
connected and has exactly two vertices of odd
degree
A B
C
D
A B
C
D A
B C
D
56.
Hamiltonian graph
Definition 20:A Hamiltonian path in a graph
G is a simple path, containing every vertex of G
exactly once.
A Hamiltonian circuit in a graph G is a simple
circuit, containing every vertex of G exactly once.
A graph with a Hamiltonian circuit is a
Hamiltonian graph
57.
Hamiltonian graph
Corollary:
Corollary: Thecomplete graph Kn is a
Hamiltonian
Necessary conditions:
1) A Hamiltonian graph is connected.
2) If G has a Hamiltonian cycle, then for all vertex v
of G: .
3) If deg(v) > 2, then as we try to build a Hamilton
cycle, once we pass through vertex v, any unused
edges incident with v are deleted from further
consideration
deg 2
v
58.
Hamiltonian graph
Sufficient conditions:
Theorem9: (Ore’s Theorem,1960) Let G be a
multygraph with n vertices and
for all nonadjacent vertices u and v of G, then G
contains a Hamiltonian cycle
deg deg
u v n
59.
Hamiltonian graph
Theorem 10:(Dirac's Theorem) Let G be a
multygraph with n vertices and
for every vertex v in G, then graph G contains a
Hamiltonian cycle
deg
2
n
v
60.
Hamiltonian graph
Theorem 11:Let G be a multygraph with n
vertices and
for all vertices u and v of G: , then G
contains a Hamiltonian path
deg deg 1
u v n
u v
61.
Traveling
Salesperson Problem
Here atraveling salesperson leaves his or her home
and must visit certain locations before returning. The
objective is to find an order in which to visit the
Locations that is most efficient (perhaps in terms of
total distance traveled or total cost). The problem
can be modeled with a labeled (edges have distances
or costs associated with them) graph where the most
efficient Hamiltonian cycle is sought.
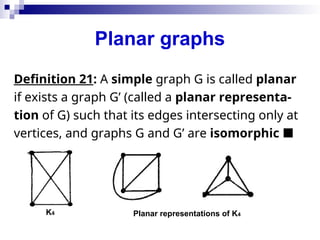
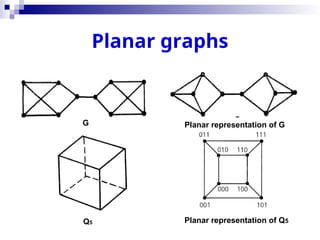
Planar graphs
Definition 21:A simple graph G is called planar
if exists a graph G’ (called a planar representa-
tion of G) such that its edges intersecting only at
vertices, and graphs G and G’ are isomorphic
K4 Planar representations of K4
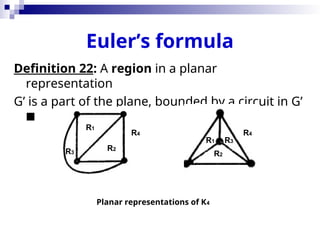
Euler’s formula
Definition 22:A region in a planar
representation
G’ is a part of the plane, bounded by a circuit in G’
Planar representations of K4
R1
R2
R3
R4 R4
R1
R2
R3
73.
Euler’s formula
Theorem 12:Let G be a connected planar graph
with “e” edges and “v” vertices. Let “r” be the
number of regions formed by a planar
representation of G. Then r = e - v + 2
Corollary 1:
Corollary 1: If G is a connected, planar graph
that contains “e” (>1) edges and “v” vertices, then
3 6
e v
74.
Corollary 2:
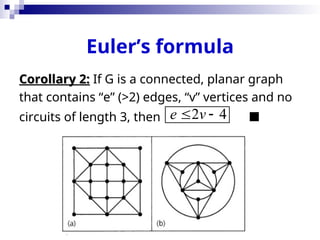
Corollary 2:If G is a connected, planar graph
that contains “e” (>2) edges, “v” vertices and no
circuits of length 3, then
2 4
e v
Euler’s formula
75.
Euler’s formula
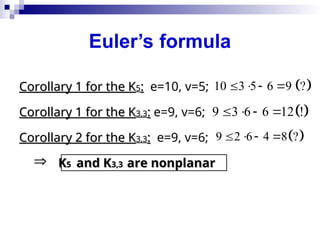
Corollary 1for the K
Corollary 1 for the K5
5:
: e=10, v=5;
Corollary 1 for the K
Corollary 1 for the K3,3
3,3:
: e=9, v=6;
Corollary 2 for the K
Corollary 2 for the K3,3
3,3:
: e=9, v=6;
K
K5
5 and K
and K3,3
3,3 are nonplanar
are nonplanar
10 3 5 6 9 ?
9 3 6 6 12 !
9 2 6 4 8 ?
76.
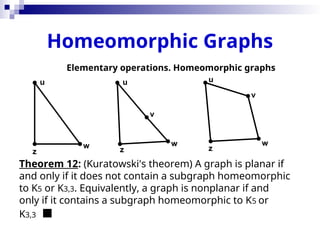
Homeomorphic Graphs
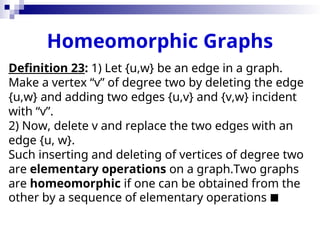
Definition 23:1) Let {u,w} be an edge in a graph.
Make a vertex “v” of degree two by deleting the edge
{u,w} and adding two edges {u,v} and {v,w} incident
with “v”.
2) Now, delete v and replace the two edges with an
edge {u, w}.
Such inserting and deleting of vertices of degree two
are elementary operations on a graph.Two graphs
are homeomorphic if one can be obtained from the
other by a sequence of elementary operations
77.
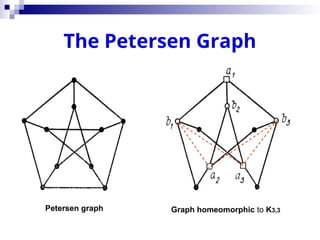
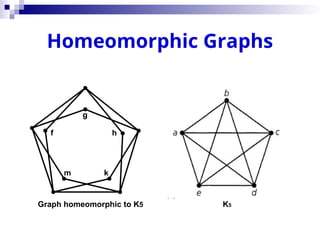
Homeomorphic Graphs
Theorem 12:(Kuratowski's theorem) A graph is planar if
and only if it does not contain a subgraph homeomorphic
to K5 or K3,3. Equivalently, a graph is nonplanar if and
only if it contains a subgraph homeomorphic to K5 or
K3,3
v
u
w
z
u
z
w
u
v
w
z
Elementary operations. Homeomorphic graphs
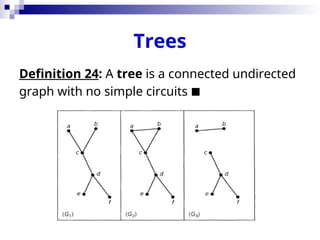
Trees
Corollary:
Corollary: A treecannot contain multiple edges
or loops. Therefore any tree must be a simple
Graph
Theorem 13: An undirected graph is a tree if and
only if there is a unique, simple path between any
two vertices
Theorem 14: An undirected graph T=(V,E) with
|V|=n verticesis is a tree if and only if it has exactly
n –1 edges (|E|=n-1)
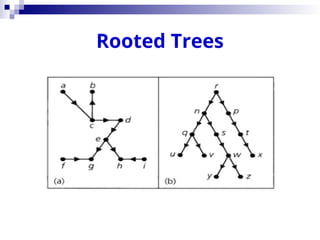
82.
Rooted Trees
Definition 25:If T is a directed graph, then T is
called a directed tree if the underlying ndirected
graph is a tree.
When T is a directed tree, T is called a rooted
tree if there is a unique vertex “r”, called the
root in T, with the , and for all other
vertices “v”, the
deg 0
in r
deg 1
in v
Definition 26: Ina rooted tree, a vertex “v” with
is called a leaf (or terminal vertex).
All other vertices are called internal vertices.
The level of a vertex “v” in a rooted tree is the length
of the unique directed path from the root to v.
The height of a rooted tree is the maximum of the
levels of vertices. A rooted tree T of height “h” is said
to be balanced if the level number of every leaf in T
is h-1 or h.
Let “u” and “v” are two vertices in a rooted tree T, “u”
is a parent of “v” (v is a child of u) if there is a
directed edge (u,v) from u to v in T.
The ancestors of v are the vertices in the path from
the root to v (excluding v and including the root).
deg 0
out v
85.
Rooted Trees
The descendantsof a vertex v are those vertices
that have v as an ancestor.
Two vertices with a common parent are referred to
as siblings
Definition 27: Let T=(V, E) be a rooted tree, and
let “m” is any natural number. We call T an m-ary
tree if
When m = 2, the tree is called a binary tree.
deg
out v m for all v V
86.
Rooted Trees
If
then Tis called a full (complete) m-ary tree. The
special case of m = 2 results in a full binary tree.
In a full m-ary tree, each internal vertex has
exactly
m children; each leaf of this tree still has no
children
deg 0 deg
out v or out v m for all v V
87.
Rooted Trees
Theorem 15:Let T = (V, E) be a full m-ary tree
with |V| = n. If T has “l” leaves and “i” internal
vertices, then
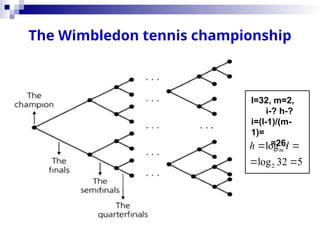
Example 15: The Wimbledon tennis championship is a
single-elimination tournament wherein a player is eliminated
after a single loss. If 32 women compete in the singles
championship, how many matches must be played to
determine the number-one female player? How many
matches must be played by the champion?
1
n i m and n i l
88.
The Wimbledon tennischampionship
l=32, m=2,
i-? h-?
i=(l-1)/(m-
1)=
=26,
2
log
log 32 5
m
h l
89.
Rooted Trees
Example 16:A classroom contains 25
microcomputers that must be connected to a
wall
socket that has four outlets. Connections are
made
by using extension cords that have four outlets
each. What is the least number of cords needed
to
get these computers set up for class use?
l=25, m=4, i-?
i=(l-1)/(m-1)=8,
answer=i-1=7.

























![[DSC Europe 25] Marcos Heidemann - Beyond the Hype: Making AI Coding Assistan...](https://cdn.slidesharecdn.com/ss_thumbnails/eexkhvldrjsopspdjbur-marcos-heidemann-beyond-the-hype-getting-real-value-out-of-ai-assisted-coding-260121115910-7e9d41ec-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Srdj Stanisic - Local and Private AI in UX.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/vwmetykqmztgmokmmkfa-3-srdjan-stanisic-local-and-small-ai-in-ux-260120105855-55a31869-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Bojan Djuricic - Predictive Design Process.pdf](https://cdn.slidesharecdn.com/ss_thumbnails/5awdrbedqdek3gqu2ezy-4-the-predictive-design-bojan-djuricic-260120105856-6c399e9b-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Andrzej Kowalczyk - AI - how to start small and grow in the f...](https://cdn.slidesharecdn.com/ss_thumbnails/oy1zmo94qv6vpcqjvno2-andrzej-kowalczyk-ai-how-to-start-small-and-grow-in-the-future-1-260119121559-cf093b23-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DSC Europe 25] Laila Kakar - Leveraging AI for Strategic Excellence: Enhanci...](https://cdn.slidesharecdn.com/ss_thumbnails/eykmhrtsqmaaftwkexh7-dsc-lailakakar-1-260119101520-5f3b5616-thumbnail.jpg?width=640&height=640&fit=bounds)


![[DSC Europe 25] Paula Garcia Esteban -Building the Future: The Role of Data S...](https://cdn.slidesharecdn.com/ss_thumbnails/9ld1r1bsqpwve8qfvphy-paula-garcia-esteban-building-the-future-260122103838-4171f5cb-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Gordana Milutinovic Dumbelovic - From Insight to Oversight: A...](https://cdn.slidesharecdn.com/ss_thumbnails/t7dkjsfxqwwzceropjv4-gordana-milutinovicdumbelovic-from-insight-to-oversight-ai-driven-power-bi-moni-260119121559-9e0bf11b-thumbnail.jpg?width=640&height=640&fit=bounds)
![[DSC Europe 25] Egor Krasheninnikov - The Control Stack: Building Guardrails ...](https://cdn.slidesharecdn.com/ss_thumbnails/3lzcz7hxqmo51mtalv4u-the-control-stack-260119101520-ea90841a-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DSC Europe 25] Milovan Jovicic - Beyond AI's Reach: The Enduring Value of Ev...](https://cdn.slidesharecdn.com/ss_thumbnails/pyeij0hurgwq5jugmtnv-2-milovan-jovicic-beyond-ais-reach-the-enduring-value-of-evergreen-design-v2-260120105856-d6ee57e5-thumbnail.jpg?width=640&height=640&fit=bounds)
