
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Schutz 2
Similar to Schutz 2 (20)
More from jcklp1
Recently uploaded
Recently uploaded (20)
Schutz 2
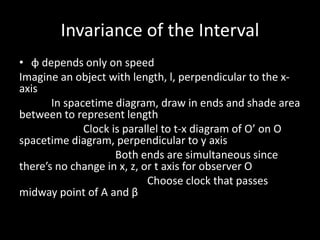
- 1. Invariance of the Interval • φ depends only on speed Imagine an object with length, l, perpendicular to the x- axis In spacetime diagram, draw in ends and shade area between to represent length Clock is parallel to t-x diagram of O’ on O spacetime diagram, perpendicular to y axis Both ends are simultaneous since there’s no change in x, z, or t axis for observer O Choose clock that passes midway point of Α and β
- 2. Invariance of the Interval • A light ray will reflect back to some exact point after some time, meaning Α and β are simultaneous for O’ Therefore, Length of rod O’^2 is related to length of rod of O^2 by φ(v) Since rod is perpendicular, there is no preferred direction and φ(v) is a scalar quantity
- 3. Invariance of the Interval • Imagine O, O’, and O’’ which moves opposite of O’ We find s’’^2=s’^2=s^2, so φ(v) is plus or minus one Since we’re using squares, we take the positive value • Length perpendicular to relative velocity is the same to all observers Any event in a frame perpendicular to motion is simultaneous for viewers If I’m moving to left and friend is moving to right, an object in our midpoint moving vertically will be simultaneous
- 4. Invariance of the Interval • Δs relates events, not observers If positive (Latin>Greek) events are spacelike separated (Me and an alien doing a jumping jack 3,000,000 light years away) If negative (Greek>Latin) events are timelike separated (Me and an alien doing a jumping jack 3,000,000 nanometers away) If 0, events are lightlike/null separated • Light Cone of A Events inside are timelike separated, outside are spacelike separated, lines are null separated Quadrants represent absolute future (+Δt), absolute past (-Δt) and elsewhere (outside of light cone) Events inside the light cone are reachable by physical object Past/future of certain objects can overlap but will not be the same
- 5. Invariant Hyperbolae • Way of calibrating x’ and t’ in O reference frame • Consider constant motion a=-t^2+x^2 for x-t diagram Due to invariance of interval, we find Δa’=Δa • Hyperbolae are drawn with a slope approaching that of light Since a=-1=-t^2+x^2, on t axis (where x=0), it follows that t=1 Since a’=a, t=t’=1 we can find event β at t’=1 Same logic to find x’ axis • Once again, interval is more important than anything (Δs) • Revelations of SR Adds time coordinate in distance calculations In our everyday life, events seem simultaneous • Line of Simultaneity Line where events will be simultaneous (line is tangent to event), Slope of line is velocity of frame
- 6. Results • Time Dilation As we see, t=1 and t’=1 are defined at different points t’ seems slower since it is further vertically from the origin Proper Time Time measured that passes through both events We find –Δτ^2=-Δt’^2 when clock is moving at same speed as O’ (clock is at rest), and by finding in terms of coordinates we get: dDt = Dt (1-v2 )
- 7. Results • Lorentz Contraction Imagine a rod at rest along O’ inertial frame Length for O is Δs^2 along x axis, Δs’^2 along x’ axis From calculation we find As we approach the speed of light, an object will contract • Interval Δs No universal agreement on definition (positive or negative); however this is irrelevant due to invariance Make sure to check what is being solved XB =1 (1-v2 )
- 8. Results • Failure of Simultaneity can often lead students to believe that finite transmission signal can cause time dilation This is due to two people defining “now” as a concrete time, but not agreeing on what “now” is, a consequence of the speed of light being a finite limit Always important to keep in mind that time is a coordinate, not universal
- 9. Lorentz Transformation • Assuming y’=y and z’=z, we find t’=αt+βx x’=γt+δx With α, β, γ, δ all dependent on velocity • Due to axis equations (t’=vt-x, x’=vx-t, x’=t’=0), we can infer that γ/δ and β/α are -1 Because of this, we can express t’=α(t-xv) We can take invariance of Δs to give α= , so we take positive sign This gives complete transform as t’=αt-αvx, with using value of α as previously given value This is called a boost of velocity in x This transformation only works without needing rotation (1 (1-v2 ))2
- 10. Velocity-Composition Law • Example of using Lorentz Transformation to derive rules of SR • We find speed never exceeds light if v<c • We also find small velocities can be accurately predicted using Classical Mechanics This justifies Galilean Law of Addition of Velocities at v<<c