
Recommended
Recommended
More Related Content
Viewers also liked
Similar to 10269
Similar to 10269 (20)
10269
- 1. (19) BY (11) 10269 (13) U (46) 2014.08.30 (51) МПК B 60W 30/08 (2012.01) ОПИСАНИЕ ПОЛЕЗНОЙ МОДЕЛИ К ПАТЕНТУ (12) РЕСПУБЛИКА БЕЛАРУСЬ НАЦИОНАЛЬНЫЙ ЦЕНТР ИНТЕЛЛЕКТУАЛЬНОЙ СОБСТВЕННОСТИ (54) СИСТЕМА ВИЗУАЛИЗАЦИИ ИЗОБРАЖЕНИЯ БОКОВОГО ОБЗОРА (21) Номер заявки: u 20131009 (22) 2013.11.29 (31) 101223338 (32) 2012.11.30 (33) TW (71) Заявитель: Хуа-чуан Аутомобайл Информейшн Текникал Сэнтэ Ко., Лтд. (TW) (72) Авторы: КАО, Чу-Суань; ЧАН, Ши- Сень (TW) (73) Патентообладатель: Хуа-чуан Аутомо- байл Информейшн Текникал Сэнтэ Ко., Лтд. (TW) (57) 1. Система визуализации изображения бокового обзора, предназначенная для установ- ки на транспортном средстве и вывода на дисплей по меньшей мере одного изображения бокового обзора с передней части транспортного средства, содержащая модуль определе- ния местоположения транспортного средства, модуль обработки данных, устройство за- писи изображения и устройство вывода изображения на дисплей, при этом модуль определения местоположения транспортного средства предназначен для гене- рирования координаты транспортного средства и постоянного обновления координаты транспортного средства, модуль обработки данных электрически соединен с модулем определения местополо- жения транспортного средства и предназначен для приема координат транспортного сред- ства и сравнения координат транспортного средства с координатами зоны опасности, при этом координаты зоны опасности содержат множество картографических координат, модуль обработки данных выполнен с возможностью передачи сигнала запуска, когда координаты транспортного средства совпадают с какими-либо картографическими коор- динатами, Фиг. 1 BY10269U2014.08.30
- 2. BY 10269 U 2014.08.30 2 устройство записи изображения электрически соединено с модулем обработки данных и предназначено для приема сигнала запуска и записи сигнала изображения бокового об- зора с передней части транспортного средства в соответствии с сигналом запуска, а также для передачи сигнала изображения в модуль обработки данных, устройство вывода изображения на дисплей соединено электрически с модулем обра- ботки данных и предназначено для приема сигнала изображения и вывода на дисплей изо- бражения бокового обзора. 2. Система по п. 1, отличающаяся тем, что дополнительно содержит картографиче- ский модуль, при этом картографический модуль электрически соединен с модулем обра- ботки данных и предназначен для хранения картографических координат, при этом картографические координаты включают данные о зонах опасности. 3. Система по п. 1, отличающаяся тем, что зона опасности расположена по меньшей мере в одной из зон, выбранной из группы, состоящей из следующих зон: перекресток, Т- образный перекресток и участок дороги с поворотом под углом. 4. Система по п. 1, отличающаяся тем, что картографические координаты определя- ют положение на дороге шириной менее 3 м. 5. Система по п. 1, отличающаяся тем, что модуль обработки данных выполнен с воз- можностью непрерывного сравнения координат транспортного средства с картографиче- скими координатами, передачи сигнала записи, когда координаты транспортного средства определены как существенно совпадающие с какими-либо картографическими координа- тами, передачи сигнала остановки, когда координаты транспортного средства определены как существенно не совпадающие ни с какими картографическими координатами, при этом устройство записи изображения выполнено с возможностью остановки процесса за- писи изображения бокового обзора с передней части транспортного средства при получе- нии сигнала остановки. 6. Система по п. 1, отличающаяся тем, что устройство записи изображения включает в себя однообъективную камеру, при этом данная однообъективная камера снабжена ши- рокоугольным объективом. 7. Система по п. 1, отличающаяся тем, что устройство записи изображения установ- лено в передней части транспортного средства. 8. Система по п. 1, отличающаяся тем, что дополнительно содержит датчик измере- ния скорости движения транспортного средства, электрически соединенный с модулем обработки данных для измерения скорости движения транспортного средства и генериро- вания значения скорости, при этом модуль обработки данных выполнен также с возмож- ностью сравнения измеренного значения скорости с заранее заданным значением и передачи сигнала запуска, когда координаты транспортного средства существенно совпа- дают с какими-либо картографическими координатами и измеренное значение скорости меньше, чем заранее заданное значение. 9. Система по п. 1, отличающаяся тем, что модуль определения местоположения яв- ляется модулем, выбранным из группы, состоящей из модуля спутниковой локации, инер- циальной системы ориентации, локационного модуля беспроводной сети и локационного модуля мобильной связи или любой их комбинации. 10. Система по п. 9, отличающаяся тем, что модуль спутниковой локации является частью системы, выбранной из группы, состоящей из системы глобального позициониро- вания (GPS), глобальной навигационной спутниковой системы (GLONASS), спутниковой системы навигации "Beidou" или системы позиционирования "Galileo"; локационный мо- дуль беспроводной сети представляет собой модуль, выбранный из группы, состоящей из локационного модуля сети Wi-Fi или локационного модуля сети Zigbee, а локационный модуль мобильной связи включает в себя локационный модуль GSM или локационный модуль GPRS.
- 3. BY 10269 U 2014.08.30 3 (56) 1. Патент КНР CN200510127478.1. 2. Патент КНР CN200610006954.9. Настоящая полезная модель относится к системе визуализации изображений бокового обзора, а более конкретно к системе визуализации изображения бокового обзора с перед- ней части транспортного средства, которая получает данное изображение благодаря со- поставлению координат транспортного средства с картографическими координатами. В нашей повседневной жизни в случаях, когда транспортное средство движется в уз- ком переулке и пересекает перекресток, а препятствия (такие, например, как здания или автомобили, припаркованные на улице) с обеих сторон транспортного средства могут за- гораживать обзор водителя, водитель не в состоянии увидеть транспортное средство, при- ближающееся с левой или с правой стороны. Когда же водитель замечает транспортное средство, приближающееся с левой или с правой стороны, почти вся передняя часть его транспортного средства уже выехала на перекресток, что легко может привести к дорож- но-транспортному происшествию. Поскольку узкие переулки, как правило, не имеют до- рожных знаков, в таких случаях водителям приходится самостоятельно проверять, не приближаются ли транспортные средства с левой или с правой стороны, что делает вож- дение очень неудобным и опасным. Даже в случаях, когда на перекрестке нанесена стандартная разметка, сохраняется по- тенциальный риск того, что некоторые водители будут не в состоянии следовать указани- ям дорожных знаков и не заметят их при приближении к перекрестку каких-либо транспортных средств, движущихся с левой или с правой стороны. Обзор водителя может быть заблокирован стойкой А транспортного средства или "слепой" зоной, вследствие че- го обзор водителя будет ограничен. Известна система визуализации изображения с передней, задней и боковых сторон транспортного средства с помощью передающей камеры и обработки изображения с по- следующим выведением изображения на монитор [1]. Однако эта система имеет опреде- ленный недостаток, поскольку она не в состоянии сочетать данную информацию с информацией о пересечении переулков и улиц, чтобы заранее предупредить водителя. Известна также система записи визуальной информации, картографических данных и информации о транспортном средстве с помощью устройства формирования изображения, устанавливаемого внутри транспортного средства для того, чтобы идентифицировать по- ложение транспортного средства [2]. Недостатком данной системы является то, что она может только определять положение транспортного средства, но она не в состоянии зара- нее определить информацию о пересечении переулков и улиц. С учетом вышеуказанных проблем, настоящая полезная модель направлена на созда- ние эффективной системы визуализации изображения бокового обзора, способной срав- нивать координаты транспортного средства, местоположение которого определяется с помощью модуля определения местоположения транспортного средства, с картографиче- скими координатами зон опасности, а также запускать устройство записи изображения бокового обзора с передней части транспортного средства, когда транспортное средство находится в зоне опасности, с тем, чтобы записать изображение бокового обзора с перед- ней части транспортного средства и предоставить водителю это изображение. Ввиду вышеупомянутых недостатков известного уровня техники первоочередная за- дача настоящей полезной модели заключается в создании системы визуализации изобра- жения бокового обзора, свободной от указанных недостатков и исключающей проблему, когда водитель не может проверить, возможно ли появление какого-либо другого транс- портного средства, приближающегося с левой или с правой стороны, в то время когда во-
- 4. BY 10269 U 2014.08.30 4 дитель подъезжает к перекрестку. Когда же водитель замечает, что другое транспортное средство приближается с левой или с правой стороны, вся передняя часть транспортного средства водителя уже может выехать на перекресток и водитель может оказаться не в со- стоянии уклониться от какого-либо приближающегося транспортного средства, что со- пряжено с определенным риском и неудобством для водителя. Для решения поставленной задачи в настоящей полезной модели предлагается систе- ма визуализации изображения бокового обзора, имеющая модуль определения местопо- ложения транспортного средства, а также модуль обработки данных, предназначенный для генерирования координаты транспортного средства и сравнения координаты транс- портного средства с картографическими координатами зон опасности, чтобы определить, находятся ли координаты транспортного средства в пределах диапазона картографических координат зоны опасности, при этом, если координаты транспортного средства прибли- жаются к картографическим координатам, устройство записи изображения будет запуще- но, чтобы записать изображение и предоставить изображение на дисплей водителя. Для решения вышеупомянутой задачи настоящая полезная модель предлагает систему визуализации изображения бокового обзора, устанавливаемую на транспортном средстве для вывода на дисплей водителя по меньшей мере одного изображения бокового обзора с передней части транспортного средства, причем система визуализации изображения боко- вого обзора включает в себя модуль определения местоположения, модуль обработки данных, устройство записи изображения на дисплей, устройство вывода изображения на дисплей. Модуль определения местоположения предназначен для определения местоположения транспортного средства, генерирования координат транспортного средства и постоянного обновления координат транспортного средства. Модуль обработки данных электрически соединен с модулем определения местоположения для получения координат транспортно- го средства и сравнения координат транспортного средства с данными зоны опасности, причем данные зоны опасности включают в себя множество картографических координат. Если модуль обработки данных определит, что координаты транспортного средства суще- ственно совпадают с какими-либо картографическими координатами, передается сигнал запуска. Устройство записи изображения электрически соединено с модулем обработки данных для приема сигнала запуска для записи изображения бокового обзора по ходу движения транспортного средства в соответствии с сигналом запуска, чтобы восприни- мать сигнал изображения и передавать сигнал изображения в модуль обработки данных. Устройство вывода изображения на дисплей электрически соединено с модулем обработ- ки данных и предназначено для приема сигнала изображения бокового обзора и вывода на дисплей изображения бокового обзора. При этом, если координаты транспортного средст- ва существенно совпадают с картографическими координатами, это означает, что либо координаты транспортного средства совпадают с картографическими координатами, либо координаты транспортного средства приближаются к картографическим координатам, ли- бо что координаты транспортного средства и картографические координаты находятся в пределах одного и того же диапазона. Однако данная полезная модель не ограничивается только вышеуказанными возможностями. При этом система визуализации изображения бокового обзора дополнительно содер- жит картографический модуль, который электрически соединен с модулем обработки данных и предназначен для хранения картографических координат, причем картографиче- ские координаты включают в себя сведения о зонах опасности. При этом зона опасности расположена по меньшей мере в зоне, выбранной из группы, включающей перекресток, Т-образное дорожное пересечение и участок дороги с поворо- том под углом. При этом картографические координаты определяют место на дороге шириной менее 3 м.
- 5. BY 10269 U 2014.08.30 5 При этом модуль обработки данных сравнивает координаты транспортного средства с картографическими координатами непрерывно и после того, как модуль обработки дан- ных определит, что координаты транспортного средства существенно совпадают с карто- графическими координатами, модуль обработки данных передает сигнал запуска. Модуль обработки данных передает сигнал остановки, когда координаты транспортного средства будут определены как существенно не совпадающие ни с одной из картографических ко- ординат, при этом устройство записи изображения при получении сигнала остановки пре- кращает запись изображения бокового обзора с передней части транспортного средства. Существенное отличие координат транспортного средства от картографических коорди- нат означает либо то, что координаты транспортного средства являются существенно от- даленными от картографических координат, либо то, что координаты транспортного средства и картографические координаты находятся в различных диапазонах. Однако по- лезная модель не ограничивается только такими вариантами. При этом устройство записи изображения включает в себя однообъективную камеру, которая снабжена широкоугольным объективом. При этом устройство записи изображения установлено в передней части транспортно- го средства. При этом система визуализации изображения бокового обзора дополнительно содер- жит датчик измерения скорости движения транспортного средства, электрически соеди- ненный с модулем обработки данных и предназначенный для измерения скорости движения транспортного средства и генерирования значения скорости движения транс- портного средства, при этом модуль обработки данных выполнен с возможностью сравне- ния данного значения скорости с заранее заданным значением и с возможностью передачи сигнала запуска в случае, если модуль обработки данных определит, что координаты транспортного средства существенно совпадают с какими-либо картографическими коор- динатами, а данное значение скорости меньше, чем заранее заданное. При этом модуль определения местоположения может быть модулем спутниковой ло- кации, модулем инерциальной системы ориентации, локационным модулем беспроводной сети, локационным модулем мобильной связи или любой их комбинацией. Предпочтительно, модуль спутниковой локации может быть частью системы глобаль- ного позиционирования (GPS), глобальной навигационной спутниковой системы (GLO- NASS), спутниковой системы навигации "Beidou" или системы позиционирования "Gali- leo", а локационный модуль беспроводной сети включает в себя локационный модуль сети Wi-Fi или локационный модуль сети "Zigbee", причем локационный модуль мобильной связи может быть частью локационного модуля GSM или локационного модуля GPRS. По сравнению с известным на сегодняшний день уровнем техники настоящая полез- ная модель обладает следующими преимуществами и возможностями. Водитель транспортного средства обычно вынужден выезжать на перекресток до того, как он может увидеть другие транспортные средства, приближающиеся с левой и/или с правой стороны, поэтому настоящая полезная модель представляет собой систему визуа- лизации изображения бокового обзора, содержащую модуль определения местоположения транспортного средства для генерирования координат транспортного средства; модуль обработки данных для сравнения координат транспортного средства с картографическими координатами, и если координаты транспортного средства существенно совпадут с карто- графическими координатами, то устройство записи изображения будет срабатывать по сигналу запуска для записи изображения бокового обзора по ходу движения транспортно- го средства; а также устройство вывода изображения на дисплей для вывода изображения бокового обзора на дисплей и представления изображения бокового обзора для визуаль- ного восприятия водителем. Таким образом, водитель может проверить, имеется ли какое- либо транспортное средство, приближающееся с левой или с правой стороны пересечения дорог, прежде чем водитель выедет передней частью своего транспортного средства на
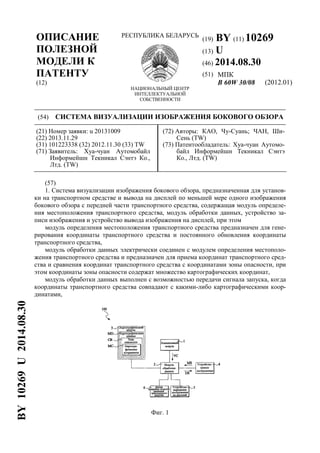
- 6. BY 10269 U 2014.08.30 6 перекресток, благодаря чему данная полезная модель способна предотвратить дорожно- транспортные происшествия и эффективно повысить безопасность вождения. Предпочтительные варианты исполнения данной полезной модели продемонстриро- ваны нижеприведенными фигурами. На фиг. 1 показана блок-схема системы визуализации изображения бокового обзора. На фиг. 2 показано изображение, соответствующее картографическим координатам, включающим зону опасности (CR). На фиг. 3 показано изображение, которое показывает взаимосвязь между транспорт- ным средством на перекрестке и картографическими координатами. На фиг. 4 показано устройство вывода изображения на дисплей, отображающее изо- бражение бокового обзора. На фиг. 5 показана взаимосвязь между транспортным средством на Т-образном пере- крестке и картографическими координатами. На фиг. 6 показана взаимосвязь между транспортным средством на участке дороги с поворотом под углом и картографическими координатами. На фиг. 7 показана взаимосвязь между транспортным средством и перекрестком, ко- торый образуют главная дорога и ответвление дороги. На фиг. 8 показана взаимосвязь между транспортным средством и перекрестком, ко- торый образуют две односторонние дороги. Технический результат настоящей полезной модели станет очевидным из последую- щего подробного описания предпочтительных вариантов исполнения настоящей полезной модели и его представления с помощью соответствующих фигур. Как показано на фиг. 1-4, содержащих соответственно блок-схему системы визуализа- ции изображения бокового обзора, изображение в соответствии с картографическими ко- ординатами, включающими зону опасности, изображение, отражающее соответствующую взаимосвязь между транспортным средством на перекрестке и картографическими коор- динатами, а также изображение устройства вывода изображения бокового обзора на дис- плей в соответствии с настоящей полезной моделью, где система 100 визуализации изображения бокового обзора содержит модуль 1 определения местоположения, модуль 2 обработки данных, картографический модуль 3, устройство 4 записи изображения, уст- ройство 5 вывода изображения на дисплей и датчик 6 измерения скорости движения транспортного средства. При этом система 100 визуализации изображения бокового обзо- ра устанавливается внутри транспортного средства 200 для вывода на дисплей по меньшей мере одного изображения бокового обзора по ходу движения транспортного средства 200. Модуль 1 определения местоположения определяет местоположение транспортного средства 200, чтобы генерировать координаты транспортного средства (VC), а затем по- стоянно обновляет координаты транспортного средства (VC). При этом модуль 1 опреде- ления местоположения обновляет координаты транспортного средства (VC) с частотой один раз в секунду, при этом модуль 1 определения местоположения может представлять собой модуль спутниковой локации, инерциальную систему ориентирования, локацион- ный модуль беспроводной сети, локационный модуль мобильной связи или любую ком- бинацию вышеперечисленного. Предпочтительно, когда модуль спутниковой локации является частью системы, выбранной из системы глобального позиционирования (GPS), глобальной навигационной спутниковой системы (GLONASS), спутниковой системы на- вигации "Beidou" или системы позиционирования "Galileo", причем локационный модуль беспроводной сети может быть частью локационного модуля сети Wi-Fi или локационно- го модуля сети Zigbee, а локационный модуль мобильной связи включает в себя локаци- онный модуль GSM или локационный модуль GPRS. Модуль 2 обработки данных электрически соединен с модулем 1 определения место- положения для приема координат транспортного средства (VC), сгенерированных моду- лем 1 определения местоположения, и для сравнения координат транспортного средства
- 7. BY 10269 U 2014.08.30 7 (VC) с зоной опасности (CR), причем зона опасности (CR) включает в себя множество картографических координат (МС), при этом модуль 2 обработки данных передает сигнал запуска (DS) в случае, если модуль 2 обработки данных определит, что координаты транспортного средства (VC) существенно совпадают с какими-либо картографическими координатами (МС). При этом модуль 2 обработки данных является элементом, обладаю- щим функциями обработки и вычисления данных, как, например, центральный процессор (CPU) или чип интегральной схемы (ИС). Картографический модуль 3 электрически соединен с модулем 2 обработки данных, причем картографический модуль 3 хранит картографические данные (MD), а картогра- фические данные (MD) включают данные о вышеупомянутой зоне опасности (CR) таким образом, что модуль 2 обработки данных может сравнивать координаты транспортного средства (VC) с картографическими координатами (МС) в зоне опасности (CR). При этом картографический модуль 3 содержит память для хранения картографических данных (MD). Устройство 4 записи изображения электрически соединено с модулем 2 обработки данных для приема сигнала запуска (DS), записи изображения бокового обзора по ходу движения транспортного средства 200 в соответствии с сигналом запуска (DS) о записи сигнала изображения (MS), а затем передачи сигнала изображения (MS) в модуль 2 обра- ботки данных. При этом устройство 4 записи изображения представляет собой прибор с зарядовой связью (CCD) или активный сенсорный датчик пикселей из комплементарного металлооксидного полупроводника (CMOS/КМОП), предназначенного для преобразова- ния оптического изображения в электронный сигнал. Устройство 5 вывода изображения на дисплей электрически соединено с модулем 2 обработки данных для приема сигнала изображения (MS) и предназначено для вывода на дисплей изображения бокового обзора. При этом устройство 5 вывода изображения на дисплей представляет собой экран - жидкокристаллический дисплей (LCD) или сенсор- ный экран для вывода изображения на дисплей. Кроме того, модуль 1 определения место- положения, модуль 2 обработки данных, картографический модуль 3 и устройство 5 вывода изображения на дисплей объединены в навигационном устройстве или автотранс- портном записывающем устройстве и могут быть встроены или внешне подключены к бортовому компьютеру транспортного средства 200. Датчик 6 измерения скорости движения транспортного средства электрически соеди- нен с модулем 2 обработки данных для измерения скорости транспортного средства 200, чтобы генерировать значение скорости, а модуль 2 обработки данных сравнивает данное значение скорости с заранее заданным значением. Если модуль 2 обработки данных опре- делит, что координаты транспортного средства (VC) существенно совпадают с какими- либо из картографических координат (МС), а данное значение скорости окажется меньше, чем заранее заданное значение, модуль 2 обработки данных передаст сигнал запуска (DS). Например, если заданное значение скорости меньше 25 км/ч, это означает, что транспорт- ное средство 200 следует вести по дороге медленно и осторожно. При этом датчик 6 изме- рения скорости движения транспортного средства использует индуктивную катушку для распознания вращения трансмиссионного вала для того, чтобы сгенерировать аналоговый сигнал и вычислить скорость транспортного средства. На фиг. 2 изображен перекресток, образованный четырехполосным пересечением, со- гласно картографическим данным (MD), при этом зона опасности (CR) соответствует ме- стоположению перекрестка. Другими словами, зона опасности (CR) расположена в местоположении непосредственно в точке пересечения четырех полос. При этом зона опасности (CR) формируется и обозначена множеством картографических координат (МС). Кроме того, картографические координаты (МС) включают трассы шириной менее 3 м, такие, как дороги, улицы или переулки, обозначенные на карте, а размер опасности (CR) продлен приблизительно на 10~15 м по отношению к перекрестку.
- 8. BY 10269 U 2014.08.30 8 На фиг. 3 изображение относится к случаю, когда транспортное средство 200 входит в зону опасности (CR) (как показано на фиг. 2), координаты транспортного средства (VC) попадают в зону опасности (CR) и соответствуют картографическим координатам (МС), так что модуль 2 обработки данных приведет в действие устройство 4 записи изображения для записи изображения. Поскольку устройство 4 записи изображения установлено в пе- редней части транспортного средства 200 и устройство 4 записи изображения имеет одно- объективную камеру, которая снабжена широкоугольным объективом, устройство 4 записи изображения может записывать изображения бокового обзора спереди, сзади, сле- ва или справа от транспортного средства 200. В других предпочтительных вариантах ис- полнения данной полезной модели устройство 4 записи изображения не ограничивается только широкоугольным объективом, как указано в данном предпочтительном варианте исполнения полезной модели, оно может быть сформировано с двумя двунаправленными объективами. На фиг. 4 изображено устройство 5 вывода изображения на дисплей, которое выводит изображение бокового обзора M1 с передней левой стороны транспортного средства 200 и изображение бокового обзора M2 с передней правой стороны транспортного средства 200, и транспортное средство 200а можно увидеть в изображении бокового обзора M1, причем местоположение транспортного средства 200а, соответствующее картографическим дан- ным (MD), обозначено пунктирной линией, как показано на фиг. 3. На практике местопо- ложение транспортного средства 200а находится в слепой зоне видимости водителя транспортного средства 200. Другими словами, обзор водителя заблокирован зданием или стойкой А в транспортном средстве 200, так что водитель не может видеть транспортное средство 200а. Из изображения бокового обзора M1, выведенного на дисплей водителя устройством вывода изображения на дисплей 5, водитель может увидеть, имеется ли ав- томобиль в переулке, несмотря на наличие "слепой" зоны, в результате чего заметно по- вышается безопасность вождения. Из приведенного выше описания следует: если модуль 2 обработки данных определя- ет, что координаты транспортного средства (VC) существенно совпадают с какой-либо одной из картографических координат (МС), модуль 2 обработки данных будет непре- рывно сравнивать координату транспортного средства (VC) с картографическими коорди- натами (МС) и передавать сигнал остановки (не показан на фигурах), когда координата транспортного средства (VC) будет определена как существенно неравная по отношению к любой из картографических координат (МС). Устройство 4 записи изображения получа- ет сигнал остановки для того, чтобы остановить процесс записи изображения бокового обзора по ходу движения транспортного средства 200. Рассмотрим совместно фиг. 1, 5 и 6. Фиг. 5 представляет изображение, которое пока- зывает соответствующую взаимосвязь между транспортным средством на Т-образном пе- рекрестке и картографическими данными согласно настоящей полезной модели, а фиг. 6 представляет изображение, которое показывает соответствующую взаимосвязь между транспортным средством на участке дороги с поворотом под углом и картографическими данными согласно настоящей полезной модели. Когда транспортное средство 200 въезжа- ет в зону опасности CR1, согласно картографическим данным (MD), соответствующую Т-образному перекрестку, координаты транспортного средства (VC) определяются моду- лем 1 определения местоположения как по существу равные картографическим координа- там (МС), так что модуль 2 обработки данных приводит в действие устройство 4 записи изображения для записи изображения бокового обзора, а устройство 5 вывода изображе- ния на дисплей выводит изображения бокового обзора с обеих сторон Т-образного пере- крестка. Кроме того, когда транспортное средство 200 согласно картографическим данным (MD) въезжает в зону опасности CR2, соответствующую участку дороги с пово- ротом под углом, устройство 5 вывода изображения на дисплей выводит изображение бо- кового обзора с участка дороги, поворачивающего под прямым углом.
- 9. BY 10269 U 2014.08.30 9 Рассмотрим совместно фиг. 1, 7 и 8. Фиг. 7 представляет изображение, которое пока- зывает соответствующую взаимосвязь между транспортным средством и перекрестком, который образован пересечением главной дороги и ответвлением дороги в соответствии с настоящей полезной моделью, а фиг. 8 представляет изображение, которое показывает со- ответствующую взаимосвязь между транспортным средством и перекрестком, который образован пересечением двух односторонних дорог, в соответствии с настоящей полезной моделью. Когда перекресток образован пересечением главной дороги R1 и ответвлением дороги R2, главная дорога имеет более высокий приоритет движения, а транспортное средство 200, которое движется по ответвлению дороги R2, должно двигаться в соответ- ствии с дорожными знаками, и когда транспортное средство 200 приближается к перекре- стку, соответствующая зона опасности CR3 находится на ответвлении дороги R2. Когда перекресток образован пересечением двух односторонних дорог R3, R4, только одна зона опасности CR4 устанавливается по одной стороне дороги с односторонним движением R3, R4, которая подходит к перекрестку, при этом другая сторона, отходящая от перекрестка, не имеет никакой зоны опасности. Фиг. 2 Фиг. 3
- 10. BY 10269 U 2014.08.30 10 Фиг. 4 Фиг. 5 Фиг. 6
- 11. BY 10269 U 2014.08.30 11 Фиг. 7 Фиг. 8 Национальный центр интеллектуальной собственности. 220034, г. Минск, ул. Козлова, 20.