The document discusses the use of neural networks for communication among multi-agents, exploring two forms of communication: discrete and continuous, aimed at shared learning and coordinated actions. It covers concepts such as reinforcement learning and the architecture of graph neural networks, emphasizing their application in controlling agent cooperation and maximizing expected rewards in decentralized environments. The analysis includes mechanisms for interpreting symbols and actions within the learning process, illustrating the complexities involved in agent communication and collaboration.

![Examples
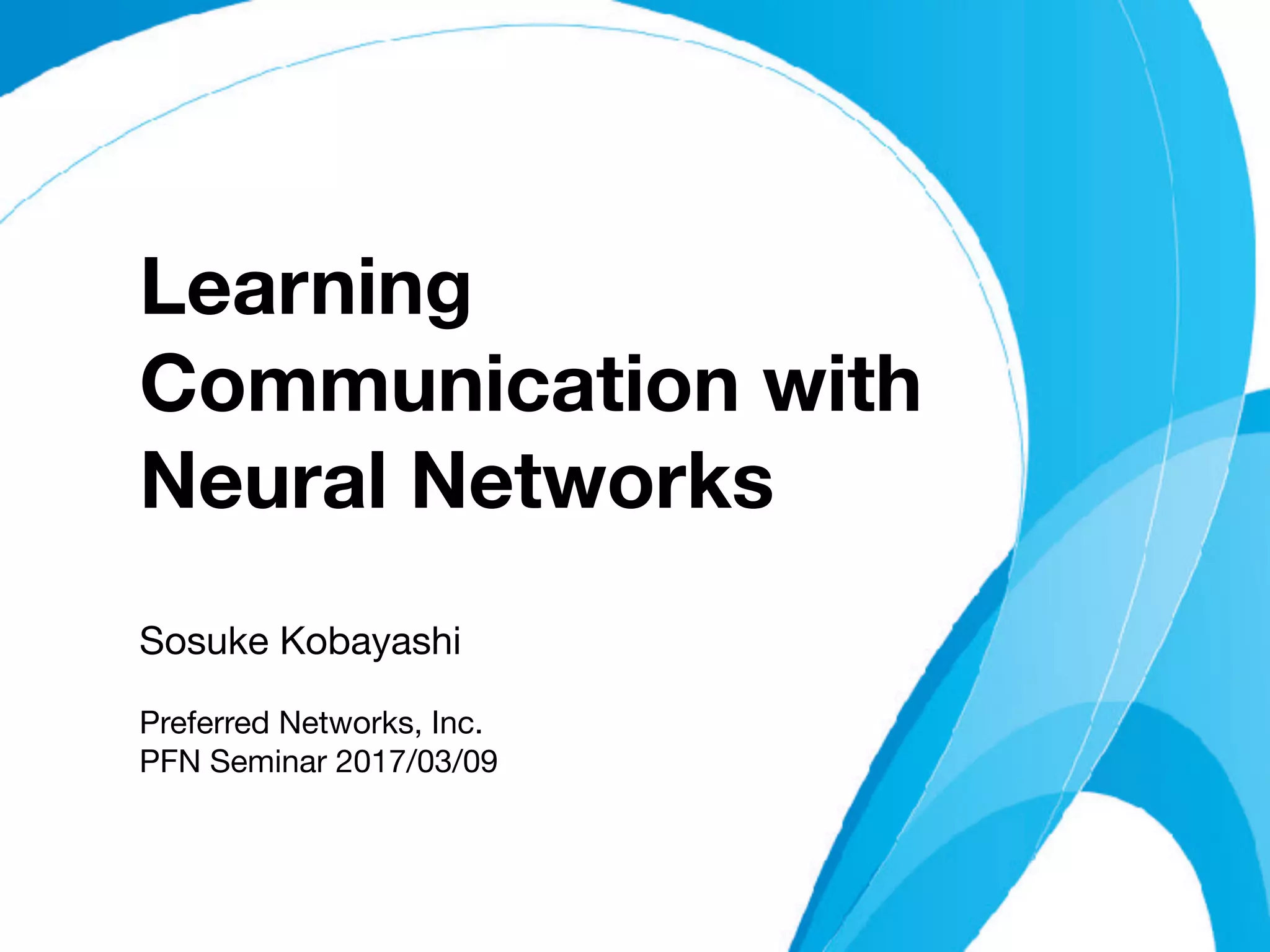
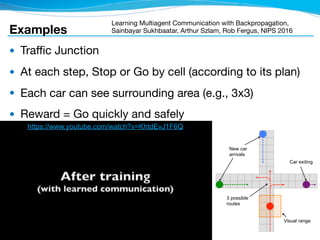
● Communication of continuous vectors
(In other words, multi-agents can be seen just one NN)
● Merge and return total information
● Each agent outputs an action a
● Learning by REINFORCE; reward*log(p(a))
5
Connecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Abstract
ke two contributions. First, we simplify and extend the graph neural network
cond, we show how this architecture can be used to control groups of cooperating
f the model consists of multilayer neural networks fi
that take as input vectors
a vector hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and
hi+1
j = fi
(hi
j, ci
j)
ci+1
j =
X
j06=j
hi+1
j0 ;
onnecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Abstract
ontributions. First, we simplify and extend the graph neural network
show how this architecture can be used to control groups of cooperating
el consists of multilayer neural networks fi
that take as input vectors
hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and
hi+1
j = fi
(hi
j, ci
j)
ci+1
j =
X
j06=j
hi+1
j0 ;
Anonymous Author(s)
Affiliation
Address
email
Abstract
bstract
oduction
rk we make two contributions. First, we simplify and extend the graph neural network
re of ??. Second, we show how this architecture can be used to control groups of cooperating
del
est form of the model consists of multilayer neural networks fi
that take as input vectors
and output a vector hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and
hi+1
j = fi
(hi
j, ci
j)
ci+1
j =
X
j06=j
hi+1
j0 ;
= 0 for all j, and i 2 {0, .., K} (we will call K the number of hops in the network).
, we can take the final hK
j and output them directly, so that the model outputs a vector
ding to each input vector, or we can feed them into another network to get a single vector or
put.
is a simple linear layer followed by a nonlinearity :
i+1 i i i i
mean
contribution. In this setting, there is no difference between each agent having its own c36
viewing them as pieces of a larger model controlling all agents. Taking the latter pers37
controller is a large feed-forward neural network that maps inputs for all agents to their a38
agent occupying a subset of units. A specific connectivity structure between layers (a) ins39
broadcast communication channel between agents and (b) propagates the agent state in th40
an RNN.41
Because the agents will receive reward, but not necessarily supervision for each action, re42
learning is used to maximize expected future reward. We explore two forms of communic43
the controller: (i) discrete and (ii) continuous. In the former case, communication is an44
will be treated as such by the reinforcement learning. In the continuous case, the sig45
between agents are no different than hidden states in a neural network; thus credit assign46
communication can be performed using standard backpropagation (within the outer RL47
We use policy gradient [33] with a state specific baseline for delivering a gradient to48
Denote the states in an episode by s(1), ..., s(T), and the actions taken at each of49
as a(1), ..., a(T), where T is the length of the episode. The baseline is a scalar fun50
states b(s, ✓), computed via an extra head on the model producing the action probabili51
maximizing the expected reward with policy gradient, the models are also trained to m52
distance between the baseline value and actual reward. Thus, after finishing an episode53
the model parameters ✓ by54
✓ =
TX
t=1
log p(a(t)|s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
✓
TX
i=t
r(i) b(s(t)
Here r(t) is reward given at time t, and the hyperparameter is for balancing the rew55
baseline objectives, set to 0.03 in all experiments.56
3 Model57
We now describe the model used to compute p(a(t)|s(t), ✓) at a given time t (ommiti58
index for brevity). Let sj be the jth agent’s view of the state of the environment. The59
controller is the concatenation of all state-views s = {s1, ..., sJ }, and the controller i60
a = (s), where the output a is a concatenation of discrete actions a = {a1, ..., aJ } for61
Note that this single controller encompasses the individual controllers for each agent62
the communication between agents.63
learning is used to maximize expected future reward. We explore two forms of communication within43
the controller: (i) discrete and (ii) continuous. In the former case, communication is an action, and44
will be treated as such by the reinforcement learning. In the continuous case, the signals passed45
between agents are no different than hidden states in a neural network; thus credit assignment for the46
communication can be performed using standard backpropagation (within the outer RL loop).47
We use policy gradient [33] with a state specific baseline for delivering a gradient to the model.48
Denote the states in an episode by s(1), ..., s(T), and the actions taken at each of those states49
as a(1), ..., a(T), where T is the length of the episode. The baseline is a scalar function of the50
states b(s, ✓), computed via an extra head on the model producing the action probabilities. Beside51
maximizing the expected reward with policy gradient, the models are also trained to minimize the52
distance between the baseline value and actual reward. Thus, after finishing an episode, we update53
the model parameters ✓ by54
✓ =
TX
t=1
log p(a(t)|s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
2
.
Here r(t) is reward given at time t, and the hyperparameter is for balancing the reward and the55
baseline objectives, set to 0.03 in all experiments.56
3 Model57
We now describe the model used to compute p(a(t)|s(t), ✓) at a given time t (ommiting the time58
index for brevity). Let sj be the jth agent’s view of the state of the environment. The input to the59
controller is the concatenation of all state-views s = {s1, ..., sJ }, and the controller is a mapping60
a = (s), where the output a is a concatenation of discrete actions a = {a1, ..., aJ } for each agent.61
Note that this single controller encompasses the individual controllers for each agents, as well as62
the communication between agents.63
One obvious choice for is a fully-connected multi-layer neural network, which could extract64
features h from s and use them to predict good actions with our RL framework. This model would65
allow agents to communicate with each other and share views of the environment. However, it66
is inflexible with respect to the composition and number of agents it controls; cannot deal well67
with agents joining and leaving the group and even the order of the agents must be fixed. On the68
other hand, if no communication is used then we can write a = { (s1), ..., (sJ )}, where is a69
per-agent controller applied independently. This communication-free model satisfies the flexibility70
requirements1
, but is not able to coordinate their actions.71
, and computes:
hi+1
j = fi
(hi
j, ci
j) (1)
ci+1
j =
1
J 1
X
j06=j
hi+1
j0 . (2)
a single linear layer followed by a nonlinearity , we have: hi+1
j = (Hi
hi
j +
can be viewed as a feedforward network with layers hi+1
= (Ti
hi
) where hi
of all hi
j and T takes the block form:
Ti
=
Hi
Ci
Ci
... Ci
Ci
Hi
Ci
... Ci
Ci
Ci
Hi
... Ci
...
...
...
...
...
Ci
Ci
Ci
... Hi
,
eural Models
Author(s)
tion
ess
il
ract
e simplify and extend the graph neural network
cture can be used to control groups of cooperating
ral Models
thor(s)
mplify and extend the graph neural network
odels
extend the graph neural network
g Neural Models
ymous Author(s)
Affiliation
Address
email
Abstract
rst, we simplify and extend the graph neural network
architecture can be used to control groups of cooperating
multilayer neural networks fi
that take as input vectors
0 0 0
2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize reward R in some34
environment. We make the simplifying assumption that each agent receives R, independent of their35
contribution. In this setting, there is no difference between each agent having its own controller, or36
viewing them as pieces of a larger model controlling all agents. Taking the latter perspective, our37
controller is a large feed-forward neural network that maps inputs for all agents to their actions, each38
agent occupying a subset of units. A specific connectivity structure between layers (a) instantiates the39
broadcast communication channel between agents and (b) propagates the agent state in the manner of40
an RNN.41
Because the agents will receive reward, but not necessarily supervision for each action, reinforcement42
learning is used to maximize expected future reward. We explore two forms of communication within43
the controller: (i) discrete and (ii) continuous. In the former case, communication is an action, and44
will be treated as such by the reinforcement learning. In the continuous case, the signals passed45
between agents are no different than hidden states in a neural network; thus credit assignment for the46
communication can be performed using standard backpropagation (within the outer RL loop).47
We use policy gradient [33] with a state specific baseline for delivering a gradient to the model.48
Denote the states in an episode by s(1), ..., s(T), and the actions taken at each of those states49
as a(1), ..., a(T), where T is the length of the episode. The baseline is a scalar function of the50
states b(s, ✓), computed via an extra head on the model producing the action probabilities. Beside51
maximizing the expected reward with policy gradient, the models are also trained to minimize the52
distance between the baseline value and actual reward. Thus, after finishing an episode, we update53
the model parameters ✓ by54
TX log p(a(t)|s(t), ✓)
TX TX
2
Problem Formulation
consider the setting where we have M agents, all cooperating to maximize reward R in some
ironment. We make the simplifying assumption that each agent receives R, independent of their
tribution. In this setting, there is no difference between each agent having its own controller, or
wing them as pieces of a larger model controlling all agents. Taking the latter perspective, our
troller is a large feed-forward neural network that maps inputs for all agents to their actions, each
nt occupying a subset of units. A specific connectivity structure between layers (a) instantiates the
adcast communication channel between agents and (b) propagates the agent state in the manner of
RNN.
ause the agents will receive reward, but not necessarily supervision for each action, reinforcement
ning is used to maximize expected future reward. We explore two forms of communication within
controller: (i) discrete and (ii) continuous. In the former case, communication is an action, and
be treated as such by the reinforcement learning. In the continuous case, the signals passed
ween agents are no different than hidden states in a neural network; thus credit assignment for the
mmunication can be performed using standard backpropagation (within the outer RL loop).
use policy gradient [33] with a state specific baseline for delivering a gradient to the model.
note the states in an episode by s(1), ..., s(T), and the actions taken at each of those states
a(1), ..., a(T), where T is the length of the episode. The baseline is a scalar function of the
es b(s, ✓), computed via an extra head on the model producing the action probabilities. Beside
ximizing the expected reward with policy gradient, the models are also trained to minimize the
ance between the baseline value and actual reward. Thus, after finishing an episode, we update
model parameters ✓ by
✓ =
TX
t=1
log p(a(t)|s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
2
.
e r(t) is reward given at time t, and the hyperparameter is for balancing the reward and the
eline objectives, set to 0.03 in all experiments.
Model
, ..., h0
J ], and computes:
hi+1
j = fi
(hi
j, ci
j) (1)
ci+1
j =
1
J 1
X
j06=j
hi+1
j0 . (2)
at fi
is a single linear layer followed by a nonlinearity , we have: hi+1
j = (Hi
hi
j +
e model can be viewed as a feedforward network with layers hi+1
= (Ti
hi
) where hi
enation of all hi
j and T takes the block form:
Ti
=
Hi
Ci
Ci
... Ci
Ci
Hi
Ci
... Ci
Ci
Ci
Hi
... Ci
...
...
...
...
...
Ci
Ci
Ci
... Hi
,
g Neural Models
mous Author(s)
Affiliation
Address
email
Abstract
rst, we simplify and extend the graph neural network
rchitecture can be used to control groups of cooperating
Neural Models
ous Author(s)
filiation
ddress
mail
stract
we simplify and extend the graph neural network
hitecture can be used to control groups of cooperating
al Models
or(s)
lify and extend the graph neural network
an be used to control groups of cooperating
ecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Abstract
ions. First, we simplify and extend the graph neural network
how this architecture can be used to control groups of cooperating
sists of multilayer neural networks fi
that take as input vectors
The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and
2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize reward R in some34
environment. We make the simplifying assumption that each agent receives R, independent of their35
contribution. In this setting, there is no difference between each agent having its own controller, or36
viewing them as pieces of a larger model controlling all agents. Taking the latter perspective, our37
controller is a large feed-forward neural network that maps inputs for all agents to their actions, each38
agent occupying a subset of units. A specific connectivity structure between layers (a) instantiates the39
broadcast communication channel between agents and (b) propagates the agent state in the manner of40
an RNN.41
Because the agents will receive reward, but not necessarily supervision for each action, reinforcement42
learning is used to maximize expected future reward. We explore two forms of communication within43
the controller: (i) discrete and (ii) continuous. In the former case, communication is an action, and44
will be treated as such by the reinforcement learning. In the continuous case, the signals passed45
between agents are no different than hidden states in a neural network; thus credit assignment for the46
communication can be performed using standard backpropagation (within the outer RL loop).47
We use policy gradient [33] with a state specific baseline for delivering a gradient to the model.48
Denote the states in an episode by s(1), ..., s(T), and the actions taken at each of those states49
as a(1), ..., a(T), where T is the length of the episode. The baseline is a scalar function of the50
states b(s, ✓), computed via an extra head on the model producing the action probabilities. Beside51
maximizing the expected reward with policy gradient, the models are also trained to minimize the52
distance between the baseline value and actual reward. Thus, after finishing an episode, we update53
the model parameters ✓ by54
✓ =
TX log p(a(t)|s(t), ✓)
✓
TX
r(i) b(s(t), ✓)
✓
TX
r(i) b(s(t), ✓)
2
.
2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize reward R in some34
environment. We make the simplifying assumption that each agent receives R, independent of their35
contribution. In this setting, there is no difference between each agent having its own controller, or36
viewing them as pieces of a larger model controlling all agents. Taking the latter perspective, our37
controller is a large feed-forward neural network that maps inputs for all agents to their actions, each38
agent occupying a subset of units. A specific connectivity structure between layers (a) instantiates the39
broadcast communication channel between agents and (b) propagates the agent state in the manner of40
an RNN.41
Because the agents will receive reward, but not necessarily supervision for each action, reinforcement42
learning is used to maximize expected future reward. We explore two forms of communication within43
the controller: (i) discrete and (ii) continuous. In the former case, communication is an action, and44
will be treated as such by the reinforcement learning. In the continuous case, the signals passed45
between agents are no different than hidden states in a neural network; thus credit assignment for the46
communication can be performed using standard backpropagation (within the outer RL loop).47
We use policy gradient [33] with a state specific baseline for delivering a gradient to the model.48
Denote the states in an episode by s(1), ..., s(T), and the actions taken at each of those states49
as a(1), ..., a(T), where T is the length of the episode. The baseline is a scalar function of the50
states b(s, ✓), computed via an extra head on the model producing the action probabilities. Beside51
maximizing the expected reward with policy gradient, the models are also trained to minimize the52
distance between the baseline value and actual reward. Thus, after finishing an episode, we update53
the model parameters ✓ by54
✓ =
TX
t=1
log p(a(t)|s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
✓
TX
i=t
r(i) b(s(t), ✓)
2
.
Here r(t) is reward given at time t, and the hyperparameter is for balancing the reward and the55
baseline objectives, set to 0.03 in all experiments.56
3 Model57
We now describe the model used to compute p(a(t)|s(t), ✓) at a given time t (ommiting the time58
index for brevity). Let sj be the jth agent’s view of the state of the environment. The input to the59
tanh
email
Abstract
abstract
roduction
ork we make two contributions. First, we simplify and extend the graph neural network
ure of ??. Second, we show how this architecture can be used to control groups of cooperating
del
lest form of the model consists of multilayer neural networks fi
that take as input vectors
and output a vector hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and
s
hi+1
j = fi
(hi
j, ci
j)
ci+1
j =
X
j06=j
hi+1
j0 ;
0
j = 0 for all j, and i 2 {0, .., K} (we will call K the number of hops in the network).
d, we can take the final hK
j and output them directly, so that the model outputs a vector
nding to each input vector, or we can feed them into another network to get a single vector or
tput.
CommNet modelth communication stepModule for agent
email
Abstract
abstract
Introduction
n this work we make two contributions. First, we simplify and extend the graph neural network
rchitecture of ??. Second, we show how this architecture can be used to control groups of cooperating
gents.
Model
he simplest form of the model consists of multilayer neural networks fi
that take as input vectors
i
and ci
and output a vector hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and
omputes
hi+1
j = fi
(hi
j, ci
j)
ci+1
j =
X
j06=j
hi+1
j0 ;
We set c0
j = 0 for all j, and i 2 {0, .., K} (we will call K the number of hops in the network).
desired, we can take the final hK
j and output them directly, so that the model outputs a vector
orresponding to each input vector, or we can feed them into another network to get a single vector or
calar output.
email
Abstract
abstract1
1 Introduction2
In this work we make two contributions. First, we simplify and extend the graph neural network3
architecture of ??. Second, we show how this architecture can be used to control groups of cooperating4
agents.5
2 Model6
The simplest form of the model consists of multilayer neural networks fi
that take as input vectors7
hi
and ci
and output a vector hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m}, and8
computes9
hi+1
j = fi
(hi
j, ci
j)
10
ci+1
j =
X
j06=j
hi+1
j0 ;
We set c0
j = 0 for all j, and i 2 {0, .., K} (we will call K the number of hops in the network).11
If desired, we can take the final hK
j and output them directly, so that the model outputs a vector12
corresponding to each input vector, or we can feed them into another network to get a single vector or13
scalar output.14
email
Abstract
abstract1
1 Introduction2
In this work we make two contributions. First, we simplify and extend the graph neural n3
architecture of ??. Second, we show how this architecture can be used to control groups of coop4
agents.5
2 Model6
The simplest form of the model consists of multilayer neural networks fi
that take as input7
hi
and ci
and output a vector hi+1
. The model takes as input a set of vectors {h0
1, h0
2, ..., h0
m8
computes9
hi+1
j = fi
(hi
j, ci
j)
10
ci+1
j =
X
j06=j
hi+1
j0 ;
We set c0
j = 0 for all j, and i 2 {0, .., K} (we will call K the number of hops in the ne11
If desired, we can take the final hK
j and output them directly, so that the model outputs a12
corresponding to each input vector, or we can feed them into another network to get a single v13
scalar output.14
their actions, each agent occupying a subset of units. A specific connectivity structure between layers
(a) instantiates the broadcast communication channel between agents and (b) propagates the agent
state.
3 Communication Model
We now describe the model used to compute p(a(t)|s(t), ✓) at a given time t (omitting the time
index for brevity). Let sj be the jth agent’s view of the state of the environment. The input to the
controller is the concatenation of all state-views s = {s1, ..., sJ }, and the controller is a mapping
a = (s), where the output a is a concatenation of discrete actions a = {a1, ..., aJ } for each agent.
Note that this single controller encompasses the individual controllers for each agents, as well as
the communication between agents.
3.1 Controller Structure
We now detail our architecture for that allows communication without losing modularity. is built
from modules fi
, which take the form of multilayer neural networks. Here i 2 {0, .., K}, where K
is the number of communication steps in the network.
Each fi
takes two input vectors for each agent j: the hidden state hi
j and the communication ci
j,
and outputs a vector hi+1
j . The main body of the model then takes as input the concatenated vectors
h0
= [h0
1, h0
2, ..., h0
J ], and computes:
Connecting Neural Models
Connecting Neural Models
Connecting Neural Models
Anonymous Author(s)
Affiliation
Address
2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize rewa34
environment. We make the simplifying assumption that each agent receives R, indepe35
contribution. In this setting, there is no difference between each agent having its own36
viewing them as pieces of a larger model controlling all agents. Taking the latter pe37
controller is a large feed-forward neural network that maps inputs for all agents to thei38
agent occupying a subset of units. A specific connectivity structure between layers (a) i39
2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize reward R in some34
environment. We make the simplifying assumption that each agent receives R, independent of their35
contribution. In this setting, there is no difference between each agent having its own controller, or36
viewing them as pieces of a larger model controlling all agents. Taking the latter perspective, our37
controller is a large feed-forward neural network that maps inputs for all agents to their actions, each38
agent occupying a subset of units. A specific connectivity structure between layers (a) instantiates the39
broadcast communication channel between agents and (b) propagates the agent state in the manner of40
an RNN.41
Because the agents will receive reward, but not necessarily supervision for each action, reinforcement42
learning is used to maximize expected future reward. We explore two forms of communication within43
the controller: (i) discrete and (ii) continuous. In the former case, communication is an action, and44
will be treated as such by the reinforcement learning. In the continuous case, the signals passed45
between agents are no different than hidden states in a neural network; thus credit assignment for the46
ecting Neural Models2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize reward R in some34
onnecting Neural Models2 Problem Formulation33
We consider the setting where we have M agents, all cooperating to maximize reward R in some34
Connecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Connecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Connecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Connecting Neural Models
Anonymous Author(s)
Affiliation
Address
email
Figure 1: An overview of our CommNet model. Left: view of module fi
for a single agent j. Note
Learning Multiagent Communication with Backpropagation,
Sainbayar Sukhbaatar, Arthur Szlam, Rob Fergus, NIPS 2016](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-5-320.jpg)
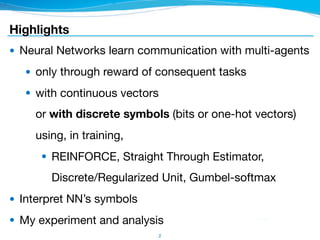
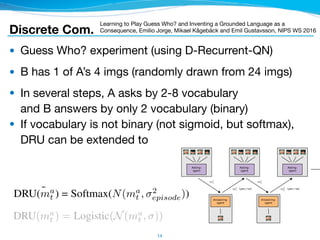
![Discrete Com.
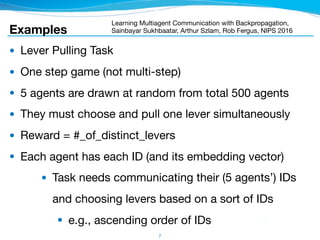
● Communication of (discrete) binary sequences
● Each agent outputs an action a after com. steps
● DQN. In training,
● (a) RIAL uses binary com.
● (b) DIAL uses noisy continuous com. = DRU
9
Learning to Communicate with Deep Multi-Agent Reinforcement Learning, Jakob
N. Foerster, Yannis M. Assael, Nando de Freitas, Shimon Whiteson, NIPS 2016
Q-network represents Qa
(oa
t , ma
t 1, ha
t 1, ua
), which conditions on that agent’s individual hidden
state ha
t 1 and observation oa
t as well as messages from other agents ma0
t 1.
To avoid needing a network with |U||M| outputs, we split the network into Qa
u and Qa
m, the Q-values
for the environment and communication actions, respectively. Similarly to [18], the action selector
separately picks ua
t and ma
t from Qu and Qm, using an ✏-greedy policy. Hence, the network requires
only |U| + |M| outputs and action selection requires maximising over U and then over M, but not
maximising over U ⇥ M.
Both Qu and Qm are trained using DQN with the following two modifications, which were found to be
essential for performance. First, we disable experience replay to account for the non-stationarity that
occurs when multiple agents learn concurrently, as it can render experience obsolete and misleading.
Second, to account for partial observability, we feed in the actions u and m taken by each agent
as inputs on the next time-step. Figure 1(a) shows how information flows between agents and the
environment, and how Q-values are processed by the action selector in order to produce the action,
ua
t , and message ma
t . Since this approach treats agents as independent networks, the learning phase is
not centralised, even though our problem setting allows it to be. Consequently, the agents are treated
exactly the same way during decentralised execution as during learning.
ot
1
ut+1
2
Q-Net
ut
1
Q-Net
Action
Select
mt
1
mt+1
2
Agent1Agent2
ot+1
2
Action
Select
mt-1
2
Environment
Q-Net
Action
Select
Q-Net
Action
Select
t+1t
(a) RIAL - RL based communication
ot
1
ut+1
2
C-Net
ut
1
C-Net
Action
Select
DRU
mt
1
mt+1
2
Agent1Agent2
ot+1
2
Action
Select
Environment
C-Net
Action
Select
C-Net
Action
Select
DRU
t+1t
(b) DIAL - Differentiable communication](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-9-320.jpg)
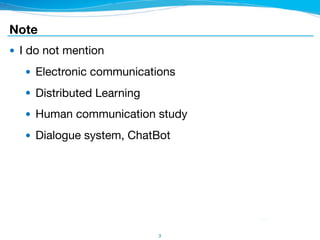
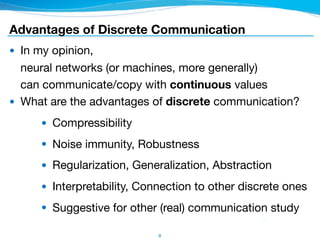
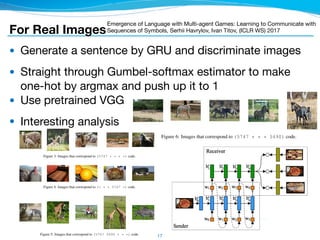
![Discrete Com.
● Multi-Step MNIST; Two players with each MNIST image
● Each sends each image’s number (0-9)
by binary x 4 steps (= 4bit = can represent 16 patterns)
● Reward = prediction
● Learned to represent 0-9 by 4bit →
10
Learning to Communicate with Deep Multi-Agent Reinforcement Learning, Jakob
N. Foerster, Yannis M. Assael, Nando de Freitas, Shimon Whiteson, NIPS 2016
y outperforming the NoComm baseline. DIAL with param-
e substantially faster than RIAL. Furthermore, parameter
b) shows results for n = 4 agents. DIAL with parameter
ods. In this setting, RIAL without parameter sharing was
se results illustrate how difficult it is for agents to learn the
ameter sharing can be crucial for learning to communicate.
dicating that the gradient provides a richer and more robust
he communication protocol discovered by DIAL for n = 3
re 4(c) shows a decision tree corresponding to an optimal
rogation room after day two, there are only two options:
ted the room before. If three prisoners had been, the third
The other options can be encoded via the “On” and “Off”
d on the well known MNIST digit classification dataset [25].
u1
2
m1 m2 m3 m4
u1
1
u5
1
u5
2
… … …
… … …
… … …
Agent1Agent2
m1
…
…
u1
2
u1
1
u2
2
u2
1
Agent1Agent2
Figure 5: MNIST games architectures.
r
e
n
d
s
c
-
e
e
g
a) Evaluation of Multi-Step (b) Evaluation of Colour-Digit
1 2 3 4
6teS
0
1
2
3
4
5
6
7
8
9
7rueDigit(c) Protocol of Multi-Step
10N 20N 30N 40N 50N
# (SRchs
0.0
0.2
0.4
0.6
0.8
1.0
1Rrm.R(2StLmDO)
DIAL
DIAL-16
5IAL
5IAL-16
1RCRmm
2rDcOe
(a) Evaluation of Multi-Step (b) Evaluation of Colour-Digit (c) P
Figure 6: MNIST Games: (a,b) Performance of DIAL and RIAL, with and with
-NS: no parameter sharing](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-10-320.jpg)
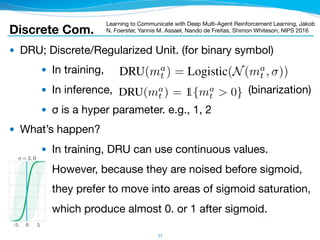
![Discrete Com.
● Multi-Step MNIST; Two players with each MNIST image
● Each sends each image’s number (0-9)
by binary x 4 steps (= 4bit = can represent 16 patterns)
● Reward = prediction
● Learned to represent 0-9 by 4bit →
12
Learning to Communicate with Deep Multi-Agent Reinforcement Learning, Jakob
N. Foerster, Yannis M. Assael, Nando de Freitas, Shimon Whiteson, NIPS 2016
y outperforming the NoComm baseline. DIAL with param-
e substantially faster than RIAL. Furthermore, parameter
b) shows results for n = 4 agents. DIAL with parameter
ods. In this setting, RIAL without parameter sharing was
se results illustrate how difficult it is for agents to learn the
ameter sharing can be crucial for learning to communicate.
dicating that the gradient provides a richer and more robust
he communication protocol discovered by DIAL for n = 3
re 4(c) shows a decision tree corresponding to an optimal
rogation room after day two, there are only two options:
ted the room before. If three prisoners had been, the third
The other options can be encoded via the “On” and “Off”
d on the well known MNIST digit classification dataset [25].
u1
2
m1 m2 m3 m4
u1
1
u5
1
u5
2
… … …
… … …
… … …
Agent1Agent2
m1
…
…
u1
2
u1
1
u2
2
u2
1
Agent1Agent2
Figure 5: MNIST games architectures.
r
e
n
d
s
c
-
e
e
g
a) Evaluation of Multi-Step (b) Evaluation of Colour-Digit
1 2 3 4
6teS
0
1
2
3
4
5
6
7
8
9
7rueDigit(c) Protocol of Multi-Step
10N 20N 30N 40N 50N
# (SRchs
0.0
0.2
0.4
0.6
0.8
1.0
1Rrm.R(2StLmDO)
DIAL
DIAL-16
5IAL
5IAL-16
1RCRmm
2rDcOe
(a) Evaluation of Multi-Step (b) Evaluation of Colour-Digit (c) P
Figure 6: MNIST Games: (a,b) Performance of DIAL and RIAL, with and with
-NS: no parameter sharing](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-12-320.jpg)
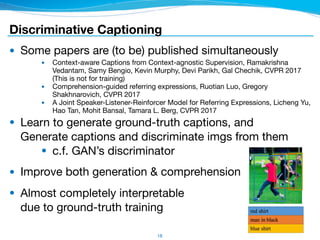
, which is used to approximate the agent’s action-observation history.
ly, the output ha
2,t of the top GRU layer, is passed through a 2-layer MLP Qa
t , ma
t =
[128, 128, (|U| + |M|)](ha
2,t).
Switch Riddle
Day 1
3 2 3 1
Off
On
Off
On
Off
On
Day 2 Day 3 Day 4
Switch:
Action: On None None Tell
Off
On
Prisoner
in IR
:
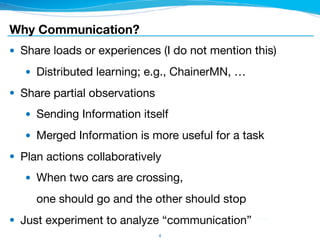
Figure 3: Switch: Every day one pris-
oner gets sent to the interrogation room
where he sees the switch and chooses
from “On”, “Off”, “Tell” and “None”.
first task is inspired by a well-known riddle described
llows: “One hundred prisoners have been newly
red into prison. The warden tells them that starting
rrow, each of them will be placed in an isolated cell,
le to communicate amongst each other. Each day,
warden will choose one of the prisoners uniformly
ndom with replacement, and place him in a central
rogation room containing only a light bulb with a
e switch. The prisoner will be able to observe the
nt state of the light bulb. If he wishes, he can toggle
ght bulb. He also has the option of announcing that he believes all prisoners have visited the
rogation room at some point in time. If this announcement is true, then all prisoners are set free,
it is false, all prisoners are executed[...]” [24].
itecture. In our formalisation, at time-step t, agent a observes oa
t 2 {0, 1}, which indicates if
gent is in the interrogation room. Since the switch has two positions, it can be modelled as a
message, ma
t . If agent a is in the interrogation room, then its actions are ua
t 2 {“None”,“Tell”};
wise the only action is “None”. The episode ends when an agent chooses “Tell” or when the
mum time-step, T, is reached. The reward rt is 0 unless an agent chooses “Tell”, in which
it is 1 if all agents have been to the interrogation room and 1 otherwise. Following the riddle
ition, in this experiment ma
is available only to the agent a in the interrogation room. Finally,
ion of n = 3 (b) Evaluation of n = 4
Off
Has Been?
On
Yes
No
None
Has Been?
Yes
No Switch?
On
On
Off
Tell
On
Day
1
2
3+
(c) Protocol of n = 3
h: (a-b) Performance of DIAL and RIAL, with and without ( -NS) parameter sharing,
Discrete Com.
Learning to Communicate with Deep Multi-Agent Reinforcement Learning, Jakob
N. Foerster, Yannis M. Assael, Nando de Freitas, Shimon Whiteson, NIPS 2016](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-13-320.jpg)
![● (This is my opinion, not the authors’ one.)
● This
is similar to Gumbel-softmax.
● Two noise distributions are also similar?
15
Discrete Com.
Learning to Play Guess Who? and Inventing a Grounded Language as a
Consequence, Emilio Jorge, Mikael Kågebäck and Emil Gustavsson, NIPS WS 2016
oes from top to bottom. The green boxes illustrate the internal state of the
a human perspective since we communicate through words which are no
ma
t is passed through a variant of DRU as described in section 2.3 to gene
using ˆmt
a =DRU(ma
t ) = Softmax(N(ma
t , 2
episode)) in the training case w
dimensional normal distribution. During evaluation ˆmt
a(i) = {1 if i =
is used instead.
malization (see, [7]) is performed in the MLP for the image embedding and o
ma0
t 1. During testing non-stochastic versions of batch normalization is used
g averages of values observed during training are used instead of those fro
the parameters of the network are performed as described in section 2.3 wi
n [2, Appendix A].
easing noise
y curriculum learning described in [8], where Bengio et al. show that gradu
Categorical Reparameterization with Gumbel-Softmax, Eric Jang, Shixiang Gu, Ben Poole, ICLR 2017
The Concrete Distribution: A Continuous Relaxation of Discrete Random Variables, Chris J. Maddison,
Andriy Mnih, Yee Whye Teh, ICLR 2017
RIVING THE DENSITY OF THE GUMBEL-SOFTMAX DI
derive the probability density function of the Gumbel-Softmax d
1, ..., ⇡k and temperature ⌧. We first define the logits xi = log ⇡
, where gi ⇠ Gumbel(0, 1). A sample from the Gumbel-Softmax c
yi =
exp ((xi + gi)/⌧)
Pk
j=1 exp ((xj + gj)/⌧)
for i = 1, ..., k
ENTERED GUMBEL DENSITY
ping from the Gumbel samples g to the Gumbel-Softmax sample y
ation of the softmax operation removes one degree of freedom. To
equivalent sampling process that subtracts off the last element, (
B DERIVING THE DENSITY
Here we derive the probability dens
bilities ⇡1, ..., ⇡k and temperature ⌧
g1, ..., gk, where gi ⇠ Gumbel(0, 1).
yi =
exp
Pk
j=1
B.1 CENTERED GUMBEL DENSIT
The mapping from the Gumbel samp
2.1 GUMBEL-SOFTMAX ESTIMATOR
The Gumbel-Softmax distribution is smooth, an
respect to their parameters ⇡. Thus, by replacing
we can use backpropagation to compute gradien
replacing non-differentiable categorical samples
as the Gumbel-Softmax estimator.
1
The Gumbel(0, 1) distribution can be sampled
Uniform(0, 1) and computing g = log( log(u)).
egorical random
expected value
Softmax distrib
temperatures, G
2.1 GUMBEL
The Gumbel-S
respect to their
we can use ba
replacing non-
as the Gumbel
1
The Gumbe
Uniform(0, 1) a
o samples from a categorical distribution as ⌧ ! 0. At higher
ples are no longer one-hot, and become uniform as ⌧ ! 1.
TOR
s smooth, and therefore has a well-defined gradient @y/@⇡, with
by replacing categorical samples with Gumbel-Softmax samples
mpute gradients (see Section 3.1). We denote this procedure of
ical samples with a differentiable approximation during training
n be sampled using inverse transform sampling by drawing u ⇠
g( log(u)).
2](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-15-320.jpg)
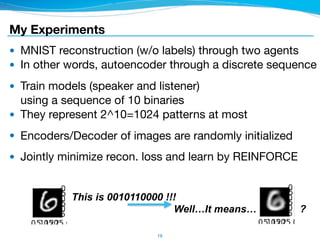
![For Real Images
● SENDER Sends 1 symbol from 10~100 vocabulary
and RECEIVER chooses 1 of 2 imgs
● 2 imgs have different label (in 100 labels)
● Use pretrained VGGNet
● Succeeded to discriminate.
But, some models made strange com.
using only 2 symbols
16
Under review as a conference paper at ICLR 2017
informed senderagnostic sender receiver
symbol
1
symbol
2
symbol
3
symbol
1
symbol
2
symbol
3
left
image
right
image
Under review as a conference paper at ICLR 2017
0.00
0.03
0.06
0.09
2 10152025 38 100
Singular Value Position
NormalizedSpectrum
Figure 2: Left: Communication success as a function of training iterations for the configurations
using fc visual representations. The plots report performance on 1/10 of the test set. Right: Singular
values of symbols used by the informed sender (configuration as in row 2 of Table 1).
id sender vis voc used comm purity (%) obs-chance
rep size symbols success (%) purity (%)
1 informed sm 100 58 100 46 0.27
2 informed fc 100 38 100 41 0.23
3 informed sm 10 10 100 35 0.18
4 informed fc 10 10 100 32 0.17
5 agnostic sm 100 2 99 21 0.15
6 agnostic fc 10 2 99 21 0.15
7 agnostic sm 10 2 99 20 0.15
8 agnostic fc 100 2 99 19 0.15
Multi-Agent Cooperation and the Emergence of (Natural) Language, Angeliki
Lazaridou, Alexander Peysakhovich, Marco Baroni, ICLR 2017
Under review as a conference p
agnostic sender
symbol
1
symbol
2
symbol
3
F
the symbol and image embedd
better denoted by the symbol.
temperature ⌧) and the receive
General Training Details W
mensionality of all embedding
sender: 20, temperature of all
100 symbols. The sender and
the game. The only supervisio
at the right referent. This setup
1998). As outlined in Section
policy r(iL, iR, s(✓S(iL, iR, t)
IE˜r[R(˜r)] where R is the rew
are updated through the Reinfo](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-16-320.jpg)
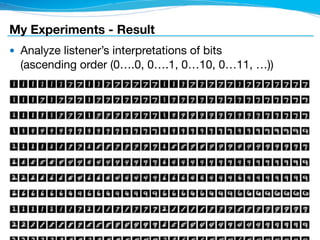
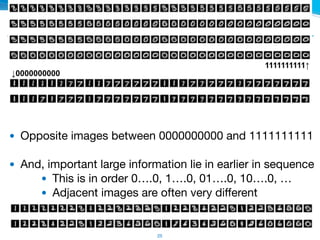
![My Experiments - Result
● Reconstructed Image (Top)
● Raw Image (Bottom)
● Sent sentences
● 0 [1111001011] 6 [0111110101] 9 [0010110011] 0 [1111001101]
1 [0000000100] 5 [1110010010] 9 [0101101111] 7 [0000011110]
3 [1110000101] 4 [0011011010]
● Almost succeed to send image by 10 bits
● with some confusion. 3 or 5, 9 or 4, 0 or 8
20](https://image.slidesharecdn.com/pfxseminar170309forslideshare-170708083116/85/Learning-Communication-with-Neural-Networks-20-320.jpg)









![[Paper Reading] Attention is All You Need](https://cdn.slidesharecdn.com/ss_thumbnails/reading20181228-190111054908-thumbnail.jpg?width=640&height=640&fit=bounds)

























































