자율주행을 위한 기계학습연구
기존 자율주행 연구에서 기계학습의 역할
- (영상)입력을 해석하는 제한된 용도로만 사용됨
영상 입력 제어 알고리듬 제어 명령인식 알고리듬
- 인식 알고리듬: 사물 인식, 추적, 차선 인식,…
- 제어 알고리듬: 차선 이탈 경고 (LDW), 전방 추돌 경고 (FCW), 앞차 추종 제어 (ACC)
11.
자율주행을 위한 기계학습연구
기계학습을 활용한 자율주행 연구들
- (영상/주행기록) 입력 데이터로 부터 제어명령을 위한 로직을 직접 학습함
영상 입력 제어 명령
인식 알고리듬
+
제어 알고리듬
12.
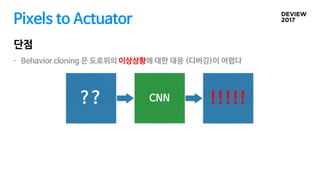
Pixels to Actuator
End-to-endlearning for self-driving cars [Nvidia; Udacity]
- 입력 영상에 상응하는 조향값을 이용하여 CNN을 학습
- 72시간 분량의 주행영상을 사용
Generic Driving Model
Large-scalevideo datasets [Berkeley]
- 블랙박스 (dashcam) 영상을 활용하여
- 다양한 운전자의 주행기록과
- 다양한 도로 상황에 대한 데이터를 확보
- 일반적인 운전자 모델 학습을 목표
21.
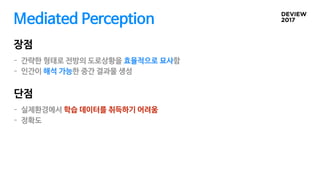
Generic Driving Model
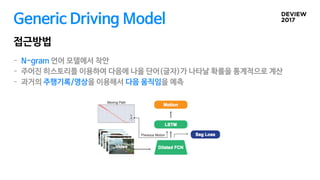
접근방법
-N-gram 언어 모델에서 착안
- 주어진 히스토리를 이용하여 다음에 나올 단어(글자)가 나타날 확률을 통계적으로 계산
S T U D E N
…
P(Z |STUDEN ) = 0.002
P(T |STUDEN ) = 0.98
…
P(A|STUDEN ) = 0.001
22.
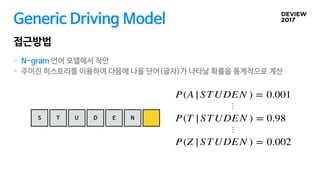
Generic Driving Model
접근방법
-N-gram 언어 모델에서 착안
- 주어진 히스토리를 이용하여 다음에 나올 단어(글자)가 나타날 확률을 통계적으로 계산
S T U D E N T
…
P(Z |STUDEN ) = 0.002
P(T |STUDEN ) = 0.98
P(A|STUDEN ) = 0.001
…
23.
Generic Driving Model
접근방법
-N-gram 언어 모델에서 착안
- 주어진 히스토리를 이용하여 다음에 나올 단어(글자)가 나타날 확률을 통계적으로 계산
- 과거의 주행기록/영상을 이용해서 다음 움직임을 예측
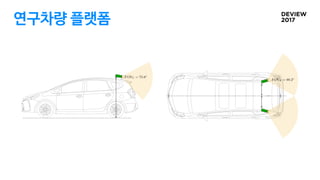
이미지기반 차선변경 학습알고리듬
데이터 취득과 태깅
- 실험차량을 고속화도로와 도심에서 운전하면서 총 50,044 장의 좌/우 측후방 영상을 취득
- 아래의 기준에 따라서 취득된 데이터를 분류
- BLOCKED: 차량이 물리적으로 해당 차선으로 이동(진입)이 불가능한 경우
- FREE: 차량이 이동하기에 충분한 공간이 확보된 경우
- UNDEFINED: 특수한 도로, 차량이 이미 차선변경에 진입한 상태의 경우
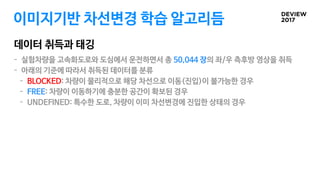
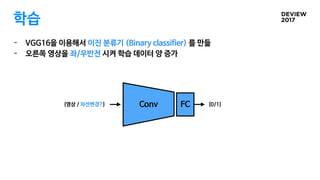
학습
- VGG16을 이용해서이진 분류기 (Binary classifier) 를 만듦
Conv FC{좌 영상 / 차선변경?}
Conv FC{우 영상 / 차선변경?}
{0/1}
{0/1}
43.
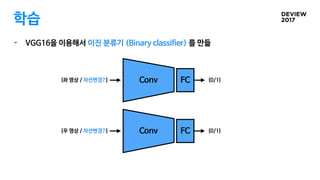
학습
- VGG16을 이용해서이진 분류기 (Binary classifier) 를 만듦
- 오른쪽 영상을 좌/우반전 시켜 학습 데이터 양 증가
44.
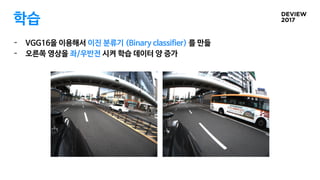
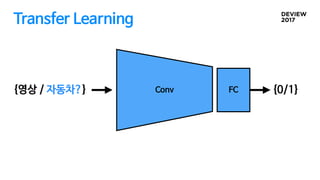
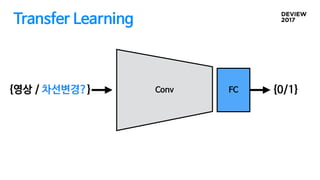
학습
- VGG16을 이용해서이진 분류기 (Binary classifier) 를 만듦
- 오른쪽 영상을 좌/우반전 시켜 학습 데이터 양 증가
Conv FC{영상 / 차선변경?} {0/1}
45.
Class Activation Map[CVPR’16]
- 입력: {이미지, 클래스} -> 출력:{클래스, 위치}
- 네트워크가 결정을 할때 어느 영역의 영상 특징을 주로 사용하는지 알 수 있음
Mc(x, y) =
∑
k
wc
k fk(x, y)
Conv5.shape = (512, 7, 7)
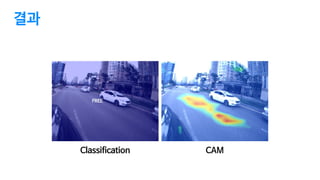
Class Activation Map






![Pixels to Actuator
End-to-end learning for self-driving cars [Nvidia; Udacity]
- 입력 영상에 상응하는 조향값을 이용하여 CNN을 학습
- 72시간 분량의 주행영상을 사용](https://image.slidesharecdn.com/124-171016052833/85/124-12-320.jpg)


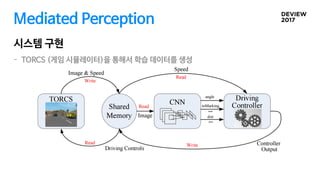
![Mediated Perception
DeepDriving[Princeton; AutoX]
- 인식결과를 주행(제어)에 필요한 정보로 직접 변환해서 제공
- 헤딩방향, 차선내 오프셋, 차간 거리, …](https://image.slidesharecdn.com/124-171016052833/85/124-16-320.jpg)

![Generic Driving Model
Large-scale video datasets [Berkeley]
- 블랙박스 (dashcam) 영상을 활용하여
- 다양한 운전자의 주행기록과
- 다양한 도로 상황에 대한 데이터를 확보
- 일반적인 운전자 모델 학습을 목표](https://image.slidesharecdn.com/124-171016052833/85/124-20-320.jpg)
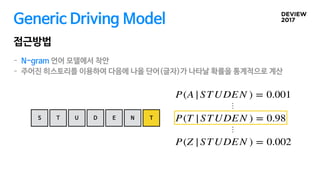









![Class Activation Map [CVPR’16]
- 입력: {이미지, 클래스} -> 출력:{클래스, 위치}
- 네트워크가 결정을 할때 어느 영역의 영상 특징을 주로 사용하는지 알 수 있음
Mc(x, y) =
∑
k
wc
k fk(x, y)
Conv5.shape = (512, 7, 7)
Class Activation Map](https://image.slidesharecdn.com/124-171016052833/85/124-45-320.jpg)











![[DL輪読会]Recent Advances in Autoencoder-Based Representation Learning](https://cdn.slidesharecdn.com/ss_thumbnails/20190119dljournalclubweb-190401063633-thumbnail.jpg?width=640&height=640&fit=bounds)

![[DL輪読会]Deep Reinforcement Learning that Matters](https://cdn.slidesharecdn.com/ss_thumbnails/deeprlthatmatters-171212050658-thumbnail.jpg?width=640&height=640&fit=bounds)



![[DL輪読会]近年のエネルギーベースモデルの進展](https://cdn.slidesharecdn.com/ss_thumbnails/energybasedmodel-200124020855-thumbnail.jpg?width=640&height=640&fit=bounds)











![[DL輪読会]"Dynamical Isometry and a Mean Field Theory of CNNs: How to Train 10,0...](https://cdn.slidesharecdn.com/ss_thumbnails/wakasugi-180824003300-thumbnail.jpg?width=640&height=640&fit=bounds)



![[123]동네 커피샵도 사이렌 오더를 쓸 수 있을까](https://cdn.slidesharecdn.com/ss_thumbnails/23-171016044352-thumbnail.jpg?width=640&height=640&fit=bounds)
![[141]네이버랩스의 로보틱스 연구 소개](https://cdn.slidesharecdn.com/ss_thumbnails/41-171015225628-thumbnail.jpg?width=640&height=640&fit=bounds)
![[131]chromium binging 기술을 node.js에 적용해보자](https://cdn.slidesharecdn.com/ss_thumbnails/31chromiumbingdingfinal-171015225736-thumbnail.jpg?width=640&height=640&fit=bounds)
![[141] 오픈소스를 쓰려는 자, 리베이스의 무게를 견뎌라](https://cdn.slidesharecdn.com/ss_thumbnails/141deview2017-171016055311-thumbnail.jpg?width=640&height=640&fit=bounds)
![[111]open, share, enjoy 네이버의 오픈소스 활동](https://cdn.slidesharecdn.com/ss_thumbnails/11openshareenjoy-171016004935-thumbnail.jpg?width=640&height=640&fit=bounds)

![[132]웨일 브라우저 1년 그리고 미래](https://cdn.slidesharecdn.com/ss_thumbnails/321-171016021602-thumbnail.jpg?width=640&height=640&fit=bounds)
![[143]알파글래스의 개발과정으로 알아보는 ar 스마트글래스 광학 시스템](https://cdn.slidesharecdn.com/ss_thumbnails/43ar-171016045445-thumbnail.jpg?width=640&height=640&fit=bounds)
![[112]clova platform 인공지능을 엮는 기술](https://cdn.slidesharecdn.com/ss_thumbnails/12clovaplatform-171016022611-thumbnail.jpg?width=640&height=640&fit=bounds)

![[142] 생체 이해에 기반한 로봇 – 고성능 로봇에게 인간의 유연함과 안전성 부여하기](https://cdn.slidesharecdn.com/ss_thumbnails/142-171016082840-thumbnail.jpg?width=640&height=640&fit=bounds)
![[135] 오픈소스 데이터베이스, 은행 서비스에 첫발을 내밀다.](https://cdn.slidesharecdn.com/ss_thumbnails/35-171016061446-thumbnail.jpg?width=640&height=640&fit=bounds)
![[113]how can realm_make_efficient_mobile_database](https://cdn.slidesharecdn.com/ss_thumbnails/13howcanrealmmakeefficientmobiledatabase2-171016050029-thumbnail.jpg?width=640&height=640&fit=bounds)

![[125] 머신러닝으로 쏟아지는 유저 cs 답변하기](https://cdn.slidesharecdn.com/ss_thumbnails/25cs-171016061055-thumbnail.jpg?width=640&height=640&fit=bounds)

![[115]14일만에 깃헙 스타 1,000개 받은 차트 오픈소스 개발기](https://cdn.slidesharecdn.com/ss_thumbnails/15141000-171016060341-thumbnail.jpg?width=640&height=640&fit=bounds)
![[225]빅데이터를 위한 분산 딥러닝 플랫폼 만들기](https://cdn.slidesharecdn.com/ss_thumbnails/2251016final-171017052307-thumbnail.jpg?width=640&height=640&fit=bounds)
![[213] 의료 ai를 위해 세상에 없는 양질의 data 만드는 도구 제작하기](https://cdn.slidesharecdn.com/ss_thumbnails/213aidata-171016104902-thumbnail.jpg?width=640&height=640&fit=bounds)







![[분석] ITS와 유동인구 데이터를 활용한 교통 예측 모델](https://cdn.slidesharecdn.com/ss_thumbnails/1-170903173002-thumbnail.jpg?width=640&height=640&fit=bounds)










![제 17회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [AutoCar죠] : 자율주행 로봇 층간 이동을 위한 인지 기능 구현](https://cdn.slidesharecdn.com/ss_thumbnails/autocar-230221082001-35f0f514-thumbnail.jpg?width=640&height=640&fit=bounds)
![[222]딥러닝을 활용한 이미지 검색 포토요약과 타임라인 최종 20161024](https://cdn.slidesharecdn.com/ss_thumbnails/22220161024-161025034006-thumbnail.jpg?width=640&height=640&fit=bounds)

![[211] 인공지능이 인공지능 챗봇을 만든다](https://cdn.slidesharecdn.com/ss_thumbnails/211chatbot-181106094835-thumbnail.jpg?width=640&height=640&fit=bounds)
![[233] 대형 컨테이너 클러스터에서의 고가용성 Network Load Balancing: Maglev Hashing Scheduler i...](https://cdn.slidesharecdn.com/ss_thumbnails/233networkloadbalancing-181018151852-thumbnail.jpg?width=640&height=640&fit=bounds)
![[215] Druid로 쉽고 빠르게 데이터 분석하기](https://cdn.slidesharecdn.com/ss_thumbnails/215druid-181012071910-thumbnail.jpg?width=640&height=640&fit=bounds)
![[245]Papago Internals: 모델분석과 응용기술 개발](https://cdn.slidesharecdn.com/ss_thumbnails/245papagointernals1-181012045005-thumbnail.jpg?width=640&height=640&fit=bounds)
![[236] 스트림 저장소 최적화 이야기: 아파치 드루이드로부터 얻은 교훈](https://cdn.slidesharecdn.com/ss_thumbnails/236deview2018jihoonson-final-181012031726-thumbnail.jpg?width=640&height=640&fit=bounds)
![[235]Wikipedia-scale Q&A](https://cdn.slidesharecdn.com/ss_thumbnails/235deview2018julienperezwikipediaqa12oct2018-181012030613-thumbnail.jpg?width=640&height=640&fit=bounds)
![[244]로봇이 현실 세계에 대해 학습하도록 만들기](https://cdn.slidesharecdn.com/ss_thumbnails/244deview2018tomisilanderrobotsrealworldfinal11oct2018-181012024720-thumbnail.jpg?width=640&height=640&fit=bounds)
![[243] Deep Learning to help student’s Deep Learning](https://cdn.slidesharecdn.com/ss_thumbnails/243deeplearningtohelpstudentsdeeplearning-181012024530-thumbnail.jpg?width=640&height=640&fit=bounds)
![[234]Fast & Accurate Data Annotation Pipeline for AI applications](https://cdn.slidesharecdn.com/ss_thumbnails/234fastaccuratedataannotationpipelineforaiapplications1-181012024230-thumbnail.jpg?width=640&height=640&fit=bounds)
![Old version: [233]대형 컨테이너 클러스터에서의 고가용성 Network Load Balancing](https://cdn.slidesharecdn.com/ss_thumbnails/233largecontainerclusternetworkloadbalancing-181012024225-thumbnail.jpg?width=640&height=640&fit=bounds)
![[226]NAVER 광고 deep click prediction: 모델링부터 서빙까지](https://cdn.slidesharecdn.com/ss_thumbnails/226naveraddeepclickprediction-181012024116-thumbnail.jpg?width=640&height=640&fit=bounds)
![[225]NSML: 머신러닝 플랫폼 서비스하기 & 모델 튜닝 자동화하기](https://cdn.slidesharecdn.com/ss_thumbnails/225nsmlmachinelearningntuningautomize-181012023407-thumbnail.jpg?width=640&height=640&fit=bounds)
![[224]네이버 검색과 개인화](https://cdn.slidesharecdn.com/ss_thumbnails/224naversearchnpersonalizationfinal-181012022631-thumbnail.jpg?width=640&height=640&fit=bounds)
![[216]Search Reliability Engineering (부제: 지진에도 흔들리지 않는 네이버 검색시스템)](https://cdn.slidesharecdn.com/ss_thumbnails/216sresearchreliabilityengineering-181012022623-thumbnail.jpg?width=640&height=640&fit=bounds)
![[214] Ai Serving Platform: 하루 수 억 건의 인퍼런스를 처리하기 위한 고군분투기](https://cdn.slidesharecdn.com/ss_thumbnails/214aiservingplatforminference-181012022603-thumbnail.jpg?width=640&height=640&fit=bounds)
![[213] Fashion Visual Search](https://cdn.slidesharecdn.com/ss_thumbnails/213fashionvisualsearchreduced-181012022540-thumbnail.jpg?width=640&height=640&fit=bounds)
![[232] TensorRT를 활용한 딥러닝 Inference 최적화](https://cdn.slidesharecdn.com/ss_thumbnails/232dlinferenceoptimizationusingtensorrt1-181012014455-thumbnail.jpg?width=640&height=640&fit=bounds)
![[242]컴퓨터 비전을 이용한 실내 지도 자동 업데이트 방법: 딥러닝을 통한 POI 변화 탐지](https://cdn.slidesharecdn.com/ss_thumbnails/242pcdpublic-181012011734-thumbnail.jpg?width=640&height=640&fit=bounds)
![[212]C3, 데이터 처리에서 서빙까지 가능한 하둡 클러스터](https://cdn.slidesharecdn.com/ss_thumbnails/212c3-181012011644-thumbnail.jpg?width=640&height=640&fit=bounds)
![[223]기계독해 QA: 검색인가, NLP인가?](https://cdn.slidesharecdn.com/ss_thumbnails/2232018-181012010149-thumbnail.jpg?width=640&height=640&fit=bounds)