PROCESS
01
개요
프로젝트 주제
딥러닝기반 어린이보호구역불법 주〮정차 자동탐지 시스템
차량번호 : 12가 1234
차량색상 : Black
날짜 및 시간 : 2019-02-26 12:50:58
증거사진/영상 :
C C T V
[ 불법 주〮정차 차량 ]
5.
PROCESS
선정 배경
01
NEWS
어린이들안전위협하는'스쿨존'의버려진양심
스쿨존 내의신호위반과 속도위반 그리고 불
법주차 등과 같은 다양한 법규 위반을 단속
하는 것은 시급한 일이지만 벌금과 범칙금을
일반 도로에 비해 2배로 부과하고 있어도 줄
어들지 않는 실정이다. 이를 근절하기 위한
무인단속 장비는 전국 1만 6085개 어린이
하굣길교통사고주범은불법주차…민원때문에단속외면
◆ 김용만 : 그렇습니다. 단속이 많이 부족
하다고 느끼는 부분이 경찰관님들도 바쁘
신 것은 저도 충분히 알고 있습니다. 그런
데 학교 옆에 가면 주로 스쿨존은 불법주정
차이기 때문에 견인지역이라고 표지판이
다 있단 말입니다.
불법주정차 때문에 발생하는 교통사고
부족한 불법주정차 단속 카메라
- 초등학교 앞 교통사고의 원인
- 스쿨존 단속카메라 전국 설치비율 1.7%
- 불법주정차는 증가, 예산은 감소
하지만 견인지역이라고 되어있는 곳에도 차들이 쫙 대어 있거든요. 그러
니까 견인이 안 된다는 얘기죠.
개요
출 처 :
https://www.nocutnews.co.kr/news/4821745(위)
http://m.ohmynews.com/NWS_Web/Mobile/at_pg.aspx?CNTN_CD=A0002312560#츄(아래)
보호구역 중 271개만 설치되어 설치율이 1.7%에 불과하다.
장비 부족 인력 부족
6.
PROCESS
선정 배경
01
NEWS
어린이들안전위협하는'스쿨존'의버려진양심
스쿨존 내의신호위반과 속도위반 그리고 불
법주차 등과 같은 다양한 법규 위반을 단속
하는 것은 시급한 일이지만 벌금과 범칙금을
일반 도로에 비해 2배로 부과하고 있어도 줄
어들지 않는 실정이다. 이를 근절하기 위한
무인단속 장비는 전국 1만 6085개 어린이
하굣길교통사고주범은불법주차…민원때문에단속외면
◆ 김용만 : 그렇습니다. 단속이 많이 부족
하다고 느끼는 부분이 경찰관님들도 바쁘
신 것은 저도 충분히 알고 있습니다. 그런
데 학교 옆에 가면 주로 스쿨존은 불법주정
차이기 때문에 견인지역이라고 표지판이
다 있단 말입니다.
불법주정차 때문에 발생하는 교통사고
부족한 불법주정차 단속 카메라
- 초등학교 앞 교통사고의 원인
- 스쿨존 단속카메라 전국 설치비율 1.7%
- 불법주정차는 증가, 예산은 감소
하지만 견인지역이라고 되어있는 곳에도 차들이 쫙 대어 있거든요. 그러
니까 견인이 안 된다는 얘기죠.
개요
출 처 :
https://www.nocutnews.co.kr/news/4821745(위)
http://m.ohmynews.com/NWS_Web/Mobile/at_pg.aspx?CNTN_CD=A0002312560#츄(아래)
보호구역 중 271개만 설치되어 설치율이 1.7%에 불과하다.
어린이 보호구역 방범용 CCTV*에
불법 주〮정차 단속 기능 추가
*어린이 보호구역 방범용 CCTV 설치율 96%
PROCESS
02
실시간
추적
차량 번호
인식
적발 차량
관리
핵심내용
• 객체 탐지 기술로 영상 내 차량 탐지
• 추적 기술로 불법주정차 여부 판단•
• 다양한 환경 속 차량 이미지 내 번호판 추출
• 이미지 전처리 후 차량번호 검출 (인식률 85%이상)
•
• 빅데이터 플랫폼 구축
• 적발차량 데이터 반영구 저장
• 데이터 관리를 위한 서비스 제공
•
핵심 기능
PROCESS
03
(You Only LookOnce)
• 최신 객체 탐지기술 - 실시간 객체 종류/위치 탐지
• 다른 기술 대비 2배 이상의 탐지 성능
• 실시간 이미지 프로세싱을 위한 컴퓨터 비전
라이브러리
• 이미지에서 문자를 추출하는 기술
• OCR 기술 중 가장 높은 정확도의 알고리즘
• 다중 객체 추적을 위한 실시간 추적 알고리즘
• 데이터 연관성/상태 추정 기술 기반 프레임워크
(Simple Online Realtime Tracking)
(Computer Vision) (Optical Character Recognition)
구현 방법
활용 기술
15.
PROCESS
03
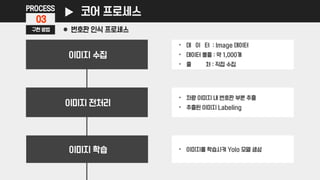
이미지 수집
• 데이 터 : Image 데이터
• 데이터 볼륨 : 약 1,000개
• 출 처 : 직접 수집
• 차량 이미지 내 번호판 부분 추출
• 추출된 이미지 Labeling
• 이미지를 학습시켜 Yolo 모델 생성
이미지 전처리
이미지 학습
구현 방법
코어 프로세스
번호판 인식 프로세스
16.
번호판 검출 •학습된 Yolo모델로 번호판 검출
번호판 이미지 OpenCV로 전처리
① 왜곡보정
② 흑백화(Grayscale)
③ 선명화(sharpening)
④ 흐림 가공(blur)
⑤ 이진화(binarization, thresholding)
⑥ 노이즈 처리
학습 과정
① 번호판에 쓰이는 한글.tff 파일 생성
② 한글.tff → 한글.tif 변환
③ 한글.tif를 Tesseract로 학습
④ 차량번호 인식용 OCR 보델 생성
이미지 전처리
Tesseract 모델 학습
17.
Tesseract OCR 적용
•전처리된 광학문자 이미지에 학습시킨
Tesseract 모델 적용
• OCR 적용 후 결과 확인 및 저장
• 검출된 번호의 사진의 전송
(불법주정차 자동차의 frame 추출사진)
번호 검출
사진 전송 및 데이터 전송
PROCESS
04
① 영상 내자동차만 탐지 (ID 부여)
② 차량 고유 ID 별 트래킹 / 시간 측정
프로젝트 결과 자동차 Detection + Tracking
구현 내용
20.
① 1000개의 이미지학습
② 차량 이미지에서 번호판만 추출하여 저장
PROCESS
04
프로젝트 결과 번호판 Detection
구현 내용
21.
PROCESS
04
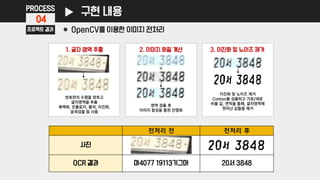
전처리 전 전처리후
사진
OCR 결과 마4077 19113기그머 20서 3848
1. 글자 영역 추출
번호판의 수평을 맞추고
글자영역을 추출
흑백화, 모폴로지, 블러, 이진화,
윤곽검출 등 사용
영역 검출 후
이미지 합성을 통한 선명화
2. 이미지 화질 개선 3. 이진화 및 노이즈 제거
이진화 및 노이즈 제거
Contour를 검출하고 가로/세로
비율 값, 면적을 통해, 글자영역에
벗어난 값들을 제거
프로젝트 결과 OpenCV를 이용한 이미지 전처리
구현 내용
22.
PROCESS
04
1. 한글 tif
2.수집 번호판 광학문자
…
• 이미지 크기 증가
• 중복된 이미지 제거
• 저화질 이미지 제거
학습한
모델 적용
데이터 학습 및 모델생성
14루 0997
데이터 전처리
프로젝트 결과
데이터 라벨링 Tesseract OCR
Tesseract OCR 번호 검출 모델
구현 내용
23.
① 대표색상 :가장 많이 검출된 HSV 색상
② 빨강, 초록, 파랑, 노랑, 주황, 검정, 흰/
회색 검출 가능
PROCESS
04
프로젝트 결과
OpenCV
차량 색상 검출
구현 내용
PROCESS
04
기존 기술 VigilanTV
카메라환경
조명 조건 등이 좋지 않은 저해상도 환경
(방범용 CCTV)
저해상도 환경
(방범용 CCTV와 동일 환경)
OCR 인식률
인식률 : 50~70%
*참조(딥러닝기반 다중 자동차번호판 인식 기술 , 전자통신연구원)
인식률 : 87%
(Test Data Set 인식률 : 99%)
번호판 검출률 -
번호판 검출률 : 96%
(Test Data Set 검출률 : 99%)
차이점
단일 정지영상만 번호판 인식
루프/레이저 등 차량 검지 센서 필요
잡영, 왜곡 등 환경 변화에 취약
동영상에서 번호판 인식
루프/레이저 등 차량 검지 센서 불필요
잡영 및 왜곡, 조도 변화에 강함
장점
루프/레이저 등 차량 검지 센서가 장착된
좋은 성능의 카메라 적용 가능
- 어린이 보호구역 방범용 CCTV 외 다양한 환경의 방범용
CCTV에도 확장 가능
- 저렴한 비용으로 기존 CCTV에 적용 가능
프로젝트 결과
기존 기술과 비교
26.
PROCESS
04
육안으로 봤을때 판독이 어려운 차량 번호는
딥러닝 기반 OCR기술로도 판독이 어려움
OCR
인식이 어려운 차량 번호는 사용자에게 증거 영상과 사진을 직접 제공
프로젝트 결과
한계점
PROCESS
별첨
도로교통법 제34조 (정차또는 주차의 방법 및 시간의 제한)
도로 또는 노상주차장에 정차/주차하려고 하는 차의
운전자는 차를 차도의 우측 가장자리에 정차하는 등
대통령령으로 정하는 정차 또는 주차의 방법·시간과
금지사항 등을 지켜야 한다.
현행 불법 주〮정차 단속 기준
31.
PROCESS
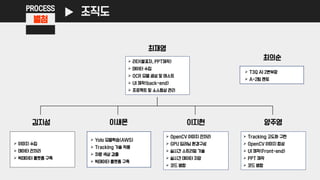
최의순
김지성
최재영
이미지 수집
데이터 전처리
빅데이터 플랫폼 구축
Tracking 고도화 구현
OpenCV 이미지 합성
UI 제작(Front-end)
PPT 제작
코드 병합
OpenCV 이미지 전처리
GPU 딥러닝 환경구성
실시간 스트리밍 기술
실시간 데이터 저장
코드 병합
Yolo 모델학습(AWS)
Tracking 기술 적용
차량 색상 검출
빅데이터 플랫폼 구축
T3Q AI 2본부장
A-2팀 멘토
리더(발표자, PPT제작)
데이터 수집
OCR 모델 생성 및 테스트
UI 제작(back-end)
프로젝트 및 소스형상 관리
이새몬 이지현 양주영
조직도
별첨
32.
PROCESS
프로젝트 일정 2018년12월 2019년 1월 2019년 2월
3~7 10~14 17~21 24~28 31~4 7~11 14~18 21~25 28~1 4~8 11~15 18~22
Task 1주차 2주차 3주차 4주차 5주차 6주차 7주차 8주차 9주차 10주차 11주차 12주차
프로젝트 선정
관련 기술 조사
객체 인식(Detection)
추적(Tracking)
이미지 수집 · 전처리
Yolo 모델 생성 및 적용
OpenCV 이미지 처리
TesseractOCR
OCR 번호 검출
빅데이터 플랫폼 개발
1차 Test
최종 Test
최종 점검 · 보고
2차 프로토타입 완성1차 프로토타입 완성
일정
별첨



![PROCESS
01
개요
프로젝트 주제
딥러닝기반 어린이보호구역 불법 주〮정차 자동탐지 시스템
차량번호 : 12가 1234
차량색상 : Black
날짜 및 시간 : 2019-02-26 12:50:58
증거사진/영상 :
C C T V
[ 불법 주〮정차 차량 ]](https://image.slidesharecdn.com/vigillantv-200426102330/85/slide-4-320.jpg)




![PROCESS
VIGILANTV 시스템 구성도
02
핵심 내용
[ INPUT ]
[ OUTPUT ]](https://image.slidesharecdn.com/vigillantv-200426102330/85/slide-10-320.jpg)
![PROCESS
인공지능 분석 플로우
VIGILANTV 시스템 구성도
02
핵심 내용
[ INPUT ]](https://image.slidesharecdn.com/vigillantv-200426102330/85/slide-11-320.jpg)
![PROCESS
빅데이터 플랫폼 플로우
VIGILANTV 시스템 구성도
02
핵심 내용
[ OUTPUT ]](https://image.slidesharecdn.com/vigillantv-200426102330/85/slide-12-320.jpg)

















![제 15회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [Hands-on 팀] : 수어 번역을 통한 위험 상황 속 의사소통 시스템 구축](https://cdn.slidesharecdn.com/ss_thumbnails/08handson-220124105412-thumbnail.jpg?width=640&height=640&fit=bounds)

![[124]자율주행과 기계학습](https://cdn.slidesharecdn.com/ss_thumbnails/124-171016052833-thumbnail.jpg?width=640&height=640&fit=bounds)



![제 13회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [스포 적발 강력 1팀] : 네 리뷰가 스포라는 것을 스포한다.](https://cdn.slidesharecdn.com/ss_thumbnails/nospo-210201110106-thumbnail.jpg?width=640&height=640&fit=bounds)

![제 15회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [쇼미더뮤직 팀] : 텍스트 감정추출을 통한 노래 추천](https://cdn.slidesharecdn.com/ss_thumbnails/07-220124105215-thumbnail.jpg?width=640&height=640&fit=bounds)
![제 17회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [힐링세포들] : MHTI (Mental Health Type Indicator)](https://cdn.slidesharecdn.com/ss_thumbnails/mhti-230220153518-9135d0db-thumbnail.jpg?width=640&height=640&fit=bounds)


![ドライブレコーダ映像からの3次元空間認識 [MOBILITY:dev]](https://cdn.slidesharecdn.com/ss_thumbnails/20191031mobilitydevmiyazawa-191031085336-thumbnail.jpg?width=640&height=640&fit=bounds)
![제 15회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [로깅줍깅] : 로그 스트림 파이프라인 여행기](https://cdn.slidesharecdn.com/ss_thumbnails/02-220124102706-thumbnail.jpg?width=640&height=640&fit=bounds)

![제 15회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [YouPlace 팀] : 카프카와 스파크를 활용한 유튜브 영상 속 제주 명소 검색](https://cdn.slidesharecdn.com/ss_thumbnails/10youplace-220124105901-thumbnail.jpg?width=640&height=640&fit=bounds)
![제 18회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [투니버스] : 스파크 기반 네이버 웹툰 댓글 수집 및 분석](https://cdn.slidesharecdn.com/ss_thumbnails/random-230809123044-ba4ea828-thumbnail.jpg?width=640&height=640&fit=bounds)

![제 17회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [AutoCar죠] : 자율주행 로봇 층간 이동을 위한 인지 기능 구현](https://cdn.slidesharecdn.com/ss_thumbnails/autocar-230221082001-35f0f514-thumbnail.jpg?width=640&height=640&fit=bounds)

![제 14회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [주식팀] : 특정 시간대의 주가 변동 패턴을 이용한 실시간 주가 예측](https://cdn.slidesharecdn.com/ss_thumbnails/random-210806021709-thumbnail.jpg?width=640&height=640&fit=bounds)




![[DL輪読会] Residual Attention Network for Image Classification](https://cdn.slidesharecdn.com/ss_thumbnails/residualattentionnetworkforimageclassification-170907072057-thumbnail.jpg?width=640&height=640&fit=bounds)
![제 17회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [나만 없어 범고래] : 스니커즈 중심의 리셀 시장 및 플랫폼 KREAM 분석](https://cdn.slidesharecdn.com/ss_thumbnails/kream-230220151043-d6151806-thumbnail.jpg?width=640&height=640&fit=bounds)

![[NUGU CONFERENCE 2019] 트랙 A-7 : When in Doubt, Just See : 영상인식기반 T map 도로교통정보...](https://cdn.slidesharecdn.com/ss_thumbnails/a-7-191031082840-thumbnail.jpg?width=640&height=640&fit=bounds)





![[2019 공감e가득] 광주 광산구 - IoT를 활용한 원스톱 장애인 주차구역 위반관리 시스템](https://cdn.slidesharecdn.com/ss_thumbnails/presentation10-200209121213-thumbnail.jpg?width=640&height=640&fit=bounds)











