Download to read offline

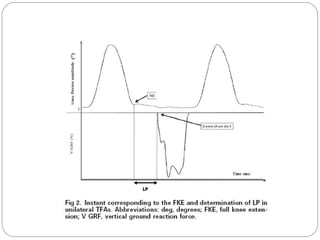
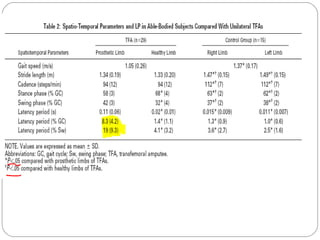
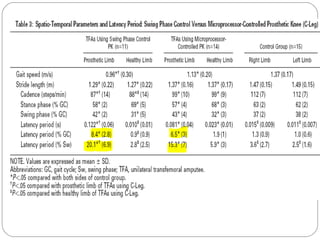
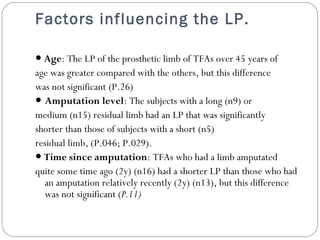


This study examined the kinematics of the terminal swing phase in unilateral transfemoral amputees using microprocessor-controlled versus mechanical prosthetic knees. The researchers found that amputees had a latent period between knee extension and initial contact on the prosthetic limb that contributed to the lengthened swing phase. They also found that the latent period was reduced in amputees using microprocessor-controlled knees compared to mechanical knees. The latent period represents additional time needed for stability and confidence before initial contact.