Download as PDF, PPTX















![Unary Actuator
Binary Actuator
Selector
Structure
Relationship
[Symbol:Prototype]prototypes
relationships
Prototype
{Symbol}tags
Relationship
Symbol
Symbol
Symbol
to
slot
from
Unary Actuator
Control
[Subject Mode: Unary Transition]
Selector
control
selector
transitions
Control
Bool
{Symbol}
{Symbol}
halts
traps
notifications
Selector ∑
Selector Patternmatch
all
match
Unary Target ∑
Slot
subject
indirect
in subject
unbind
slot
Slotin Slotslot
Unary Transition
[Symbol:Unary Target]
Symbol Mask
bindings
tags
Constraint: if Effective Slot is indirect, target
mode must not be indirect.
Binary Transition
[Symbol:Binary Target]
Symbol Mask
bindings
tags
Binary Actuator
Control
[Subject Mode: Binary Transition]
[Subject Mode: Binary Transition]
Selector
Selector
control
right transitions
left transitions
left selector
right selector Binary Target ∑
Slot
other
in other
unbind
slot
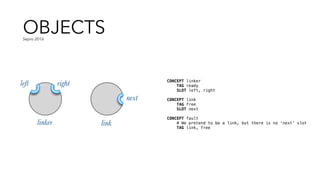
Model
[Symbol:Binary Actuator]
[Symbol:SymbolType]
[Symbol:Unary Actuator]
[Symbol:Structure]
binary actuators
symbols
unary actuators
structures
Presence ∑
present
absent
s → none
s → self
s → t
s → t.w
i.s → none
i.s → self
i.s → t
i.s → t.w
s → none
s → other
s → other.t
i.s → none
i.s → other
i.s → other.t
Structure
{Type}
[Type:Type]
[Type]
Type?
Type
set
dictionary
array
optional
base
Sum Type ∑
case 2
case 1
Symbol Type ∑
slot
tag
label
Legend
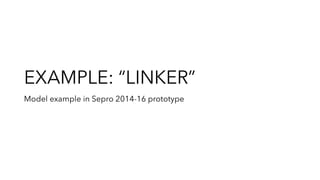
Sepro-18 Entities
Selector Pattern
Symbol Mask
Symbol Mask
slots
tags
Symbol Mask
[Symbol:Presence]mask
Subject Mode ∑
Slotindirect
direct
slot
left right
controlWHERE ON IN LEFT IN RIGHT
left target right target
transitions transitionsselector selector
this
WHERE IN THIS controlselector transition
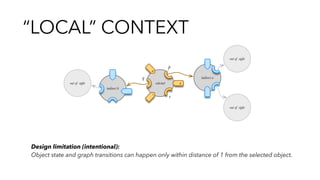
this target](https://image.slidesharecdn.com/sepro-intro-180329231324/85/Sepro-introduction-38-320.jpg)

The document describes SEPRO, a system for modeling and simulating qualitative network dynamics. SEPRO aims to test an alternative approach to simulating network problems using a purely qualitative approach. The system design principles focus on completeness, clarity, and minimal assumptions. In SEPRO, the simulated universe is represented as a directed graph of objects with qualitative properties. State transitions are triggered by an object's existing state or potential interactions between objects, and can only occur locally within the graph. The document outlines the basic concepts including actuators, selectors, transitions, and control signaling in SEPRO.