
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Saad alsheekh multi view
Similar to Saad alsheekh multi view (20)
Recently uploaded
Recently uploaded (20)
Saad alsheekh multi view
- 1. 1 of 64
- 2. 2 of 65 3-D Coordinate Spaces Remember what we mean by a 3-D coordinate space x axis y axis z axis P y z x Right-Hand Reference System
- 3. 3 of 65
- 4. 4 of 65 Position of camera in space
- 5. 5 of 65 The Up And Look Vectors Up vector Look vector Position Projection of up vector The look vector : indicates the direction in which the camera is pointing The up vector : determines how the camera is rotated
- 6. 6 of 65 Rotations In 3-D When we performed rotations in two dimensions we only had the choice of rotating about the z axis In the case of three dimensions we have more options – Rotate about x – pitch – Rotate about y – yaw – Rotate about z - roll
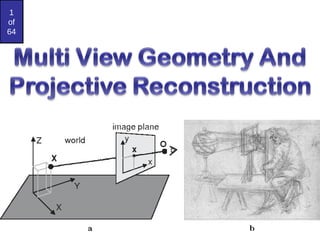
- 7. 7 of 64 Simple pinhole camera A pinhole camera is a simple camera without a lens and with a single small aperture. Light rays pass through the aperture and project an inverted image on the opposite side of the camera. Think of the virtual image plane as being in front of the camera and containing the upright image of the scene.
- 8. 8 of 65
- 10. 10 of 65 Intrinsic Parameters • principal point (u0,v0) • scale factors (dx,dy) • aspect ratio distortion factor • focal length f • lens distortion factor (models radial lens distortion) C (u0,v0) f •intrinsic parameters are of the camera device
- 11. 11 of 65 Extrinsic Parameters • translation parameters t = [tx ty tz] • rotation matrix r11 r12 r13 0 r21 r22 r23 0 r31 r32 r33 0 0 0 0 1 R = Are there really nine parameters? extrinsic parameters are where the camera sits in the world
- 12. 12 of 65 What Is Camera Calibration? Geometric camera calibration is the process of estimating intrinsic and/or extrinsic parameters You can use these parameters to - correct for lens distortion, - measure the size of an object in world units, - determine the location of the camera in the scene.
- 14. 14 of 65
- 15. 15 of 65 The camera matrix does not account for lens distortion because an ideal pinhole camera does The Computer Vision Toolbox™ calibration algorithm uses the camera model proposed by Jean-Yves Bouguet
- 16. 16 of 65 Scaling • Scaling changes the size of an object and involves two scale factors, Sx and Sy for the x- and y- coordinates respectively. • Scales are about the origin. • We can write the components: p'x = sx • px p'y = sy • py or in matrix form: P' = S • P Scale matrix as: y x s s S 0 0 P P’
- 17. 17 of 65 Translation A translation moves all points in an object along the same straight- line path to new positions. The path is represented by a vector, called the translation or shift vector. We can write the components: p'x = px + tx p'y = py + ty or in matrix form: P' = P + T tx ty x’ y’ x y tx ty = + (2, 2) = 6 =4 ?
- 18. 18 of 65 To estimate the camera parameters You need to have 3-D world points and their corresponding 2-D image points. You can get these correspondences using multiple images of a calibration pattern, such as a checkerboard. Using the correspondences, you can solve for the camera parameters.
- 20. 20 of 65 Chapter 14 Tut 14.1: Viewing Parameters All viewing parameters controlled by slider bars
- 22. 22 of 65 Calibration invers After you calibrate a camera, to evaluate the accuracy of the estimated parameters, you can: -Plot the relative locations of the camera and the calibration pattern -Calculate the re-projection errors. -Calculate the parameter estimation errors. -Use the Camera Calibrator to perform camera calibration and evaluate the accuracy of the estimated parameters.
- 24. 24 of 33 What Are Projections? Our 3-D scenes are all specified in 3-D world coordinates To display these we need to generate a 2-D image - project objects onto a picture plane So how do we figure out these projections? Picture Plane Objects in World Space
- 25. 25 of 33 Converting From 3-D To 2-D Projection is just one part of the process of converting from 3-D world coordinates to a 2-D image Clip against view volume Project onto projection plane Transform to 2-D device coordinates 3-D world coordinate output primitives 2-D device coordinates
- 26. 26 of 33 Types Of Projections There are two broad classes of projection: – Parallel: Typically used for architectural and engineering drawings – Perspective: Realistic looking and used in computer graphics Perspective ProjectionParallel Projection
- 29. 29 of 33 Types Of Projections (cont…) For anyone who did engineering or technical drawing
- 30. 30 of 33 Parallel Projections Some examples of parallel projections Orthographic Projection Isometric Projection
- 31. 31 of 33 Isometric Projections Isometric projections have been used in computer games from the very early days of the industry up to today Q*Bert Sim City Virtual Magic Kingdom
- 32. 32 of 33 Perspective Projections Perspective projections are much more realistic than parallel projections
- 33. 33 of 33 Perspective Projections There are a number of different kinds of perspective views The most common are one-point and two point perspectives One Point Perspective Projection Two-Point Perspective Projection
- 34. 34 of 65 Camera calibration revisited What if world coordinates of reference 3D points are not known? We can use scene features such as vanishing points Vanishing point Vanishing line Vanishing point Vertical vanishing point (at infinity)
- 37. 37 of 65 Measuring height without a ruler
- 38. 38 of 65 Vanishing points • All lines having the same direction share the same vanishing point image plane line in the scene vanishing point v camera center
- 39. 39 of 65 Computing vanishing points • X∞ is a point at infinity, v is its projection: v = PX∞ • The vanishing point depends only on line direction • All lines having direction D intersect at X∞ 1 30 20 10 tdz tdy tdx tX t dtz dty dtx /1 / / / 30 20 10 0 3 2 1 d d d X v X0 Xt
- 40. 40 of 65 Calibration from vanishing points Consider a scene with three orthogonal vanishing directions: v2 v1 . v3 . ote: v1, v2 are finite vanishing points and v3 is an infinite vanishing point
- 41. 41 of 65 Calibration from vanishing points Consider a scene with three orthogonal vanishing directions: v2 v1 . v3 . We can align the world coordinate system with these direction
- 42. 42 of 65 Calibration from vanishing points • p1 = P(1,0,0,0)T – the vanishing point in the x direction • Similarly, p2 and p3 are the vanishing points in the y and z directions • p4 = P(0,0,0,1)T – projection of the origin of the world coordinate system • Problem: we can only know the four columns up to independent scale factors, additional constraints needed to solve for them 4321 ppppP **** **** ****
- 43. 43 of 65 Can solve for focal length, principal pointCannot recover focal length, principal point is the third vanishing point
- 44. 1 2 3 4 1 2 3 4 Measurements on planes Approach: unwarp then measure What kind of warp is this?
- 45. Image rectification To unwarp (rectify) an image • solve for homography H given p and p′ – how many points are necessary to solve for H? p p′
- 46. 46 of 65
- 47. 47 of 65 Calibration from vanishing points: Summary • Solve for K (focal length, principal point) using three orthogonal vanishing points • Get rotation directly from vanishing points once calibration matrix is known • Advantages • No need for calibration chart, 2D-3D correspondences • Could be completely automatic • Disadvantages • Only applies to certain kinds of scenes • Inaccuracies in computation of vanishing points • Problems due to infinite vanishing points
- 48. 48 of 65 Introduction to 3D Imaging There are several ways to calculate depth information using 2D camera sensors or other optical sensing technologies.
- 49. 49 of 65
- 50. 50 of 65
- 52. 52 of 65
- 53. 53 of 65 Double vision. Vivek Nityananda, and Jenny C. A. Read J Exp Biol 2017;220:2502-2512 © 2017. Published by The Company of Biologists Ltd
- 54. 54 of 65 stereo camera • Stereo vision is the process of extracting 3-D information from multiple 2-D views of a scene • A stereo camera is a type of camera with two or more image sensors. This allows the camera to simulate human binocular vision and therefore gives it the ability to perceive depth.
- 55. 55 of 65 Two-view geometry • In this case we have two camera views capture the same scene from two different viewpoints • from two images, we are interested in estimating the 3D structure of the scene
- 56. 56 of 65 Two-view geometry • b is the baseline, or distance between the two cameras • f is the focal length of a camera • XA is the X-axis of a camera • ZA is the optical axis of a camera • P is a real-world point defined by the coordinates X, Y, and Z • uL is the projection of the real-world point P in an image acquired by the left
- 57. 57 of 65 Two-view geometry • Since the two cameras are separated by distance “b”, both cameras view the same real-world point P in a different location on the 2-dimensional images acquired. The X-coordinates of points uL and uR are given by uL = f * X/Z and uR = f * (X-b)/Z Distance between those two projected points is known as “disparity” and we can use the disparity value to calculate depth information, which is the distance between real-world point “P” and the stereo vision system. disparity = uL – uR = f * b/z
- 58. 58 of 65 Disparity • Disparity refers to difference in pixel position between two camera images. Assuming left image in stereo vision camera has a pixel at position (1, 30) and the same pixel is present at position (4, 30) in right image, the disparity value or difference is (4 – 1) =3. Disparity value is inversely proportional to depth as per the above formula.
- 59. 59 of 65 Left image Right Image Right Image Depth Image
- 61. Interest Points and Corners An interest point may be composed of various types of corner, edge, and maxima shapes. In general, a good interest point must be easy to find and ideally fast to compute; it is hoped that the interest point is at a good location to compute a feature descriptor. The interest point is thus the qualifier or keypoint around which a feature may be described
- 62. Example: estimating “fundamental matrix” that corresponds two views Slide from Silvio Savarese
- 63. Example: structure from motion
- 64. interest points • Note: “interest points” = “keypoints”, also sometimes called “features” • Many applications – tracking: which points are good to track? – recognition: find patches likely to tell us something about object category – 3D reconstruction: find correspondences across different views
- 65. This class: interest points • Suppose you have to click on some point, go away and come back after I deform the image, and click on the same points again. – Which points would you choose? original deformed
- 66. Overview of Keypoint Matching K. Grauman, B. Leibe Af Bf B1 B2 B3A1 A2 A3 Tffd BA ),( 1. Find a set of distinctive key- points 3. Extract and normalize the region content 2. Define a region around each keypoint 4. Compute a local descriptor from the normalized region 5. Match local descriptors
- 67. Goals for Keypoints Detect points that are repeatable and distinctive
- 68. Invariant Local Features Image content is transformed into local feature coordinates that are invariant to translation, rotation, scale, and other imaging parameters Features Descriptors
- 69. Feature extraction: Corners 9300 Harris Corners Pkwy, Charlotte, NC Slides from Rick Szeliski, Svetlana Lazebnik, and Kristin Grauman
- 70. Many Existing Detectors Available K. Grauman, B. Leibe Hessian & Harris [Beaudet ‘78], [Harris ‘88] Laplacian, DoG [Lindeberg ‘98], [Lowe 1999] Harris-/Hessian-Laplace [Mikolajczyk & Schmid ‘01] Harris-/Hessian-Affine [Mikolajczyk & Schmid ‘04] EBR and IBR [Tuytelaars & Van Gool ‘04] MSER [Matas ‘02] Salient Regions [Kadir & Brady ‘01] Others…
- 71. Corner Detection: Basic Idea • We should easily recognize the point by looking through a small window • Shifting a window in any direction should give a large change in intensity “edge”: no change along the edge direction “corner”: significant change in all directions “flat” region: no change in allSource: A. Efros
- 72. Corner Detection: Mathematics 2 , ( , ) ( , ) ( , ) ( , ) x y E u v w x y I x u y v I x y Change in appearance of window w(x,y) for the shift [u,v]: I(x, y) E(u, v) E(3,2) w(x, y)
- 73. Corner Detection: Mathematics 2 , ( , ) ( , ) ( , ) ( , ) x y E u v w x y I x u y v I x y I(x, y) E(u, v) E(0,0) w(x, y) Change in appearance of window w(x,y) for the shift [u,v]:
- 74. Corner Detection: Mathematics 2 , ( , ) ( , ) ( , ) ( , ) x y E u v w x y I x u y v I x y IntensityShifted intensity Window function orWindow function w(x,y) = Gaussian1 in window, 0 outside Source: R. Szeliski Change in appearance of window w(x,y) for the shift [u,v]:
- 75. Corner Detection: Mathematics 2 , ( , ) ( , ) ( , ) ( , ) x y E u v w x y I x u y v I x y We want to find out how this function behaves for small shifts Change in appearance of window w(x,y) for the shift [u,v]: E(u, v)
- 76. Corner Detection: Mathematics 2 , ( , ) ( , ) ( , ) ( , ) x y E u v w x y I x u y v I x y Local quadratic approximation of E(u,v) in the neighborhood of (0,0) is given by the second-order Taylor expansion: v u EE EE vu E E vuEvuE vvuv uvuu v u )0,0()0,0( )0,0()0,0( ][ 2 1 )0,0( )0,0( ][)0,0(),( We want to find out how this function behaves for small shifts Change in appearance of window w(x,y) for the shift [u,v]:
- 77. yyyx yxxx IIII IIII yxwM ),( x I Ix y I Iy y I x I II yx Corners as distinctive interest points 2 x 2 matrix of image derivatives (averaged in neighborhood of a point). Notation:
- 78. Corner response function “Corner” R > 0 “Edge” R < 0 “Edge” R < 0 “Flat” region |R| small 2 2121 2 )()(trace)det( MMR α: constant (0.04 to 0.06)
- 79. Harris corner detector 1) Compute M matrix for each image window to get their cornerness scores. 2) Find points whose surrounding window gave large corner response (f> threshold) 3) Take the points of local maxima, i.e., perform non-maximum suppression C.Harris and M.Stephens. “A Combined Corner and Edge Detector.” Proceedings of the 4th Alvey Vision Conference: pages 147—151, 1988.
- 80. Harris Detector [Harris88] • Second moment matrix )()( )()( )(),( 2 2 DyDyx DyxDx IDI III III g 83 1. Image derivatives 2. Square of derivatives 3. Gaussian filter g(I) Ix Iy Ix 2 Iy 2 IxIy g(Ix 2 ) g(Iy 2 ) g(IxIy) 222222 )]()([)]([)()( yxyxyx IgIgIIgIgIg ])),([trace()],(det[ 2 DIDIhar 4. Cornerness function – both eigenvalues are strong har5. Non-maxima suppression 1 2 1 2 det trace M M (optionally, blur first)
- 82. Harris Detector: Steps Compute corner response R
- 83. Harris Detector: Steps Find points with large corner response: R>threshold
- 84. Harris Detector: Steps Take only the points of local maxima of R
- 86. 89 of 65 Epipolar geometry • the 3D points P, C1,C2 and the projected points p1, p2 are all located within one common plane • This common plane denoted π is known as the epipolar plane
- 87. 90 of 65 Epipolar geometry • The epipolar plane is the plane defined by a 3D point and the two cameras centers. • The epipolar line is the line determined by the intersection of the image plane with the epipolar plane. • The baseline is the line going through the two cameras centers. • The epipole is the image-point determined by the intersection of the image plane with the baseline. • the epipole corresponds to the projection of the first camera center (say C1) onto the second image plane (say I2), or vice versa.
- 88. 91 of 65 Epipolar Lines – Example
- 89. 92 of 65 What is Mosaic and Mosaicing? • “Mosaic“ originates from an old Italian word “mosaico” which means a picture or pattern produced by arranging together small pieces of stone, tile, glass, etc. • Mosaicing is the process of assembling a series of images and joining them together to form a continuous seamless photographic representation of the image surface. • The result is an image with a field of view greater than that of a single image
- 90. 93 of 65 Why We Need Image Mosaicing? Image mosaicing not only allow you to create a large field of view using normal camera, the result image can also be used for texture mapping of a 3D environment such that users can view the surrounding scene with real images.
- 91. 94 of 65 image mosaicing: Basically there are two main algorithms of image mosaicin 2)Bi-directional Scanning 1)Unidirectional Scanning
- 92. 95 of 65 Richard Szeliski Image Stitching 95 RANSAC motion model
- 93. 96 of 65 Richard Szeliski Image Stitching 96 RANSAC motion model
- 94. 97 of 65 Richard Szeliski Image Stitching 97 RANSAC motion model