Cataloge ge 3.control and_automation_dienhathe.com-4_20_vat300_e_c6-6-4_1_rev_b
•Download as DOC, PDF•
0 likes•30 views

This document describes various parameter settings for controlling functions and settings of an inverter drive. It explains the functions of parameters C00-0 through C13-1, which control run commands, stopping methods, sequence inputs, analog inputs, pulse train inputs, and more. Parameters can be set to select control logic, running modes, filtering, and default operation settings. Notes provide additional details on functional aspects like auto restart, emergency stopping, and protection of parameter changes.

Recommended
More Related Content
What's hot
What's hot (16)
Similar to Cataloge ge 3.control and_automation_dienhathe.com-4_20_vat300_e_c6-6-4_1_rev_b
Similar to Cataloge ge 3.control and_automation_dienhathe.com-4_20_vat300_e_c6-6-4_1_rev_b (20)
More from Dien Ha The
More from Dien Ha The (20)
Recently uploaded
Recently uploaded (20)
Cataloge ge 3.control and_automation_dienhathe.com-4_20_vat300_e_c6-6-4_1_rev_b
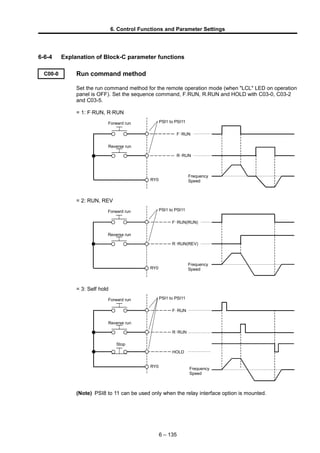
- 1. 6. Control Functions and Parameter Settings 6-6-4 Explanation of Block-C parameter functions C00-0 Run command method Set the run command method for the remote operation mode (when "LCL" LED on operation panel is OFF). Set the sequence command, F.RUN, R.RUN and HOLD with C03-0, C03-2 and C03-5. = 1: F·RUN, R·RUN PSI1 to PSI11 F・RUN RY0 R・RUN Frequency Speed Reverse run Forward run = 2: RUN, REV PSI1 to PSI11 F・RUN(RUN) RY0 R・RUN(REV) Frequency Speed Reverse run Forward run = 3: Self hold PSI1 to PSI11 F・RUN RY0 R・RUN Stop HOLD Frequency Speed Reverse run Forward run (Note) PSI8 to 11 can be used only when the relay interface option is mounted. 6 – 135
- 2. PSI1 to PSI11 RY0 6. Control Functions and Parameter Settings C00-1 Run/stop methods C00-2 Jog stop method = 1: Coast to stop = 2: Deceleration stop Coast to stop refers to stopping by turning the output OFF simultaneously with the stop command (F·RUN and R·RUN OFF). Deceleration stop refers to stopping by decelerating to the stopping frequency with the ramp down after the stop command, and then applying the DC-brake to stop. Output frequency Motor speed Output frequency during coast to stop DC brake Ramp down to stop Motor speed during coast to stop RUN (Note) When not using the pick-up function to restart after coast to stop, confirm that the motor is stopped. When not using the pickup function, if the inverter is started while the motor is rotating, the inverter may trip. C00-3 Emergency stop (EMS) input logic Set the input logic of the emergency stop sequence input signal EMS. = 1: Close to stop (when a contact is connected) = 2: Open to stop (when b contact is connected) Select the EMS signal input terminal from the control PCB terminal block PSI to 11, and set with C03-1. (Note) PSI8 to 11 can be used only when the relay interface option is mounted. C00-4 Emergency stop (EMS) mode Set the method of stopping when the emergency stop sequence input EMS turns ON. = 1: Coast to stop, without fault output = 2: Coast to stop, with fault output (When the EMS signal turns ON, the output will be shut off, and FLT will be output.) = 3: Ramp down to stop (without fault output) 6 – 136
- 3. 6. Control Functions and Parameter Settings C00-5 Control source switchover method (J1 setting) J1 setting =1: OFF =2: ON Select whether to use the sequence input signals from the control PCB terminal block in the local operation mode (when "LCL" LED on operation panel is ON). Refer to section 5-5 for details. C00-6 Control source switchover method (J2 setting) J2 setting =1: OFF =2: ON Select the auxiliary command input when the COP command is ON. Refer to section 5-5 for details. C00-7 Run contact output condition selection The conditions for turning the sequence RUN output ON are set. = 1: ON at pre-excitation (EXC) = 2: OFF at pre-excitation (EXC) C02-0~8 Various setting input selection Refer to section 5-9 for details. C03-0~F Sequence input terminal function − 1 C04-0~F Sequence input terminal function − 2 C05-0~7 Sequence input terminal function − 3 C06-0~A Sequence input terminal function − 4 Refer to section 5-3, 5-6 for details. Refer to the explanation for B06-0 to 6 (ratio interlock bias increase/decrease function) for details on C03-A and C04-9 to A. C07-0~A Analog input terminal function Refer to section 5-7 for details. 6 – 137
- 4. 6. Control Functions and Parameter Settings C08-0 Auto start (To F・RUN/R・RUN) = 1: OFF (runs with the run command ON after pre-charging) = 2: ON without pick-up If the run command is ON when the power is turned on, run will start after the inverter is charged. (Note 1) Pick-up is not executed with this setting, so if the motor is rotating when the power is turned ON, the inverter operation could trip. ON Output frequency Motor speed Pre-charging Power supply RUN = 3: ON with pick-up If the run command turns ON when the power turns ON, pick-up will start when the inverter charging is completed, and then operation will start. Set this when using momentary restart. (Note 2) The speed can be detected with the IM vector control with sensor and PM motor control (C30-0 f0 = 3, 4). As pickup operation is not carried out, set C08-0 to 2. Output frequency Motor speed Pre-charging (internal RDY) Motor speed search (For V/f control, IM speed sensor-less vector control C30-0 f0 =1,2) Power supply Motor speed RUN (Note 3) If auto start (C08-0 = 2, 3) is used, undervoltage fault will not be detected. 6 – 138
- 5. 6. Control Functions and Parameter Settings C09-0 Parameter protection Set this parameter to prevent unintentional operations from operation panel. Changing of the data can be protected per function group with the setting value as shown below. (Note 1) Set 2 to prohibit all changes. (Note 2) Set 1 to allow all changes. The 9 setting is for maker maintenance, so do not set it. (Note 3) When using the password number function (when C28-0 is set to 2), this parameter will also be locked. Set U00-1 to the value set with C28-1 to unlock the protection. C09-1 Operation panel lock This setting protects the operation panel FWD, REV and STOP key operations. = 1: All operation possible = 2: All operation prohibited (Note, the motor will stop when the STOP key is pressed for two seconds) = 3: Only STOP key can be operated. C09-2 LCL switchover protection = 1: LCL mode switchover ( LCL SET + STOP keys) during running disabled = 2: LCL mode switchover ( LCL SET + STOP keys) during running enabled (Note) When switching from the local mode to the remote mode, if the terminal block RUN, R.RUN, F.JOG or R.JOG is ON, the mode will not switch even if operation is stopped. C09-3 Reveres run sequence (R·RUN) prohibit C09-4 Reverse run jogging sequence (R·JOG) prohibit = 1: Enable = 2: Prohibit Set this to prevent unintentional reverse run operation. When set to "2", the sequence input "R RUN(R JOG)" operation command will be disabled. Note that if the reverse run setting (negative value) is input into the speed setting during "F·RUN(F JOG)" operation, reverse run will start. 6 – 139 value Block A Block B, C Basic Extn. S/W H/W 1 2 × × × × × 3 × × × × 4 × × × 5 × × 6 7 ~ 8 × × × × × 9 : Unprotected (changeable) × : Protected (unchangeable)
- 6. 6. Control Functions and Parameter Settings C09-5 Reverse run during ACR mode prohibit = 1: Enable = 2: Prohibit Set this to prevent unintentional reverse run operation. When set to “2”, reverse run during ACR operation will be prohibited. The reverse run speed will be limited to approx. 1% if reverse run is started. This setting is ignored in the V/f mode. C09-6 Fault history buffer clear The fault history details can be cleared by setting the value to 1 and then pressing LCL SET key. This setting will not be registered in the internal memory. Thus, this parameter must be set each time. Nothing will occur if set to a value other than 1. Use this before handing the unit over to the final user. (Note) The setting values exceeding 2000 are codes for maker maintenance, so do not set. C09-7 Default value load All values per function group are changed to the default values. 9: All default values load (Excluding the maker maintenance parameters) 10: Parameter A 11: Parameters B, C basic functions 12: Parameters B, C extended functions 13: Parameter B software option function Parameter C hardware option function 14: Parameters B basic functions 15: Parameters B extended functions 16: Parameter B software option function 17: Parameters C basic functions 18: Parameters C extended functions 19: Parameter C hardware option function Nothing will occur when values other than the above are set. This parameter setting value will not be registered in the internal memory. (Note) The setting values exceeding 2000 are codes for maker maintenance, so do not set. If set, the following inverter operation may be abnormal. C10-0~7 Custom parameter register Refer to section 4-4 for details on operating these parameters. 6 – 140
- 7. 6. Control Functions and Parameter Settings C11-0 Default mode setting Set which operation mode the operation panel starts up when the power is turned ON. =1: Local operation mode (LCL) =2: Remote operation mode (RMT) C11-1 Operation command at auto start setting =1: Stop =2: Forward run =3: Reverse run Set the default operation mode at power ON when using the auto start function (C08-0=2, 3) in the local operation mode (operating with the operation panel). For example, if C11-1 is set to 2 and operation is enabled after power ON (sequences RDY1, RDY2, MC are all ON), the forward run will take place. C11-2 Operation panel frequency change operation Set whether to change the frequency and speed setting values in real time. =1: Change setting value in real time =2: Change setting value when set key is pressed C11-3 Display parameter at power ON selection Select the parameters displayed on the operation panel at power ON. Refer to the following diagram. 0. 00. 0 Sub No. Main No. 0 : D block 1 : A block C11-4 LCD panel: Language setting Select the language displayed on the LCD panel. =0: English =1: French =2: German =3: Spanish =4: Italian (Note) This is displayed only when the LCD panel is connected. C11-5 LCD panel: Contrast adjustment Adjust the contrast of the characters displayed on the LCD panel. The character color will darken as a larger value is set. (Note) This is displayed only when the LCD panel is connected. 6 – 141
- 8. 6. Control Functions and Parameter Settings C11-6 LCD panel: Backlight OFF timer setting Set the time that the LCD panel backlight is ON. Set the ON time with a second unit. If the setting value is "0", the backlight will be ON at all times. (Note) This is displayed only when the LCD panel is connected. C11-7 Operation panel operation mode selection The operation panel parameter operation method can be selected from two methods. Refer to section 4-1-3 Selecting the operation method. C12-0 AI1 terminal input mode selection C12-4 AI2 terminal input mode selection Select the input mode for the AI1 and AI2 terminals. C12-0, 4 = 1 : Voltage input = 2 : Current input Refer to section 5-7 for details on using the analog input terminal. C12-1 AI1 voltage input mode selection C12-5 AI2 voltage input mode selection When the AI1 and AI2 terminal input mode is set to voltage input (C12-0, 4 = 1), set the full scale of these terminal input signals. C12-1, 5 = 1 : 0 to 10V = 2 : 0 to 5V = 3 : 1 to 5V As an example, the relation of the voltage input value and speed setting value when the AI1 and AI2 terminal input function is used for the speed setting is shown below. Refer to Table 5-7-1 for the relation of the analog input value and each setting value when using the input terminal for a function other than speed setting. Setting frequency/Setting speed Max. frequency Max. speed 0 1V C12-1,5=3 C12-1,5=1,2 5V :C12-1=1 10V:C12-2=2 Voltage input mode Input voltage 6 – 142
- 9. 6. Control Functions and Parameter Settings C12-2 AI1 current input mode selection C12-6 AI2 current input mode selection When the AI1 and AI2 terminal input mode is set to current input (C12-0, 4 = 2), set the full scale of these terminal input signals. C12-2, 6 = 1 : 4 to 20mA = 2 : 0 to 20mA As an example, the relation of the current input value and speed setting value when the AI1 and AI2 terminal input function is used for the speed setting is shown below. Refer to Table 5-7-1 for the relation of the analog input value and each setting value when using the input terminal for a function other than speed setting. 0 4mA C12-2,6=1 C12-2,6=2 20mA Setting frequency/Setting speed Max. frequency Max. speed Current input mode Input voltage 6 – 143
- 10. 6. Control Functions and Parameter Settings C12-8 AI3 terminal input mode selection C12-9 AI3 input gain Set the full scale of the AI3 terminal analog input signal with C12-8. C12-8 = 1 : -10V to +10V = 2 : -5V to +5V = 3 : +1V to +5V A multiplication gain can be applied on the AI3 terminal input value with C12-9. As an example, the relation of the voltage input value and speed setting value when the AI3 terminal input function is used for the speed setting is shown below. Refer to Table 5-7-1 for the relation of the analog input value and each setting value when using the input terminal for a function other than speed setting. Refer to section 5-7 for details on using the analog input terminals. Setting frequency/Setting speed (Forward run) Max. frequency Max. speed Max. frequency Max. speed -10V : C12-8=1 -5V : C12-8=2 1V C12-8=1,2 C12-8=3 +10V : C12-8=1 +5V : C12-8=2 When running with sequence command R•RUN When running with sequence command F•RUN (Reverse run) C12-3 Filter time constant for AI1 input C12-7 Filter time constant for AI2 input C12-A Filter time constant for AI3 input The filter time constant for the input value of the AI1, AI2 and AI3 terminals can be set. Fluctuation of the setting value caused by input signal noise or chattering, etc., can be suppressed by increasing the time constant. C12-B Program setting filter The program speed and ramp setting are set with the sequence commands S0 to SE, but chattering could occur when these input terminals are changed. In order to avoid this, batch filter processing is performed for S0 to SE. The input signal is validated when the S0 to SE input terminals obtain the same value for longer than the set time, so the program settings will not change for the time set in C12-B after the input is changed. Set C12-B to a time longer than that at which chattering could occur, and lower than the setting delay tolerance time. 6 – 144
- 11. 6. Control Functions and Parameter Settings C12-C Pulse train input : 0% setting frequency (F1) C12-D Pulse train input : 100% setting frequency (F2) C12-E Pulse train input frequency LPF time constant C12-F Pulse train input judgment time Refer to section 5-7-3 for details related to the pulse train input function. C13-0 A01 terminal output C13-1 A02 terminal output The inverter's internal parameters can be output from the control PCB analog output terminals A01 and A02. C13-7~A Built-in PLC input selection 1~4 The inverter output analog signals can be input to the built-in PLC. Select the details set in memory numbers 10h to 13h. The parameters corresponding to the C13-0,1,7 to A setting values and the full scale of those output signals is shown below. The output voltage and current values are output as a percentage of the full scale. Refer to section 5-8 for details on using the analog output terminals. Refer to section 6-11 for details on using Built-in PLC. The parameters corresponding to the C13-0, 1 setting values and the full scale of those output signals is shown below. The output voltage and current values are output as a percentage of the full scale. Refer to section 5-8 for details on using the analog output terminals. (Note 1) DM1 and DM2 for maker maintenance are to be used only by the maker for maintenance. The user must not set C13-0, 1 to 20 or 21. C13-2 RA-RC output parameters C13-3~5 PSO1, 2, 3 output parameters C13-6 FA-FC output parameters Refer to section 5-6-2 for details. 6 – 145 ValueParameterFull scale11Torque currentMotor rated current × 212Excitation currentMotor rated current × 213Actual motor rotation speedMax. speed14Namp outputRated torque × 215OLT monitor (motor protection)100%16Built-in PLC output 11000h17Built-in PLC output 21000h18Built-in PLC output 31000h19Built-in PLC output 41000h20DM1 for maker maintenance1000h21DM2 for maker maintenance1000h ValueParameterFull scale0Output frequencyMax. frequency1Setting frequency Setting speedMax. frequency Max. speed2Ramp outputMax. frequency Max. speed3Output current (Motor)Motor rated current × 24Output current (Drive)Drive rated current × 25Output voltageMotor rated voltage6Motor output power(Motor rated voltage × Motor rated current) × 27DC voltage200V Series : 300V 400V Series : 600V8OLT monitor (unit protection)100%9Heat sink temperature100°C10Motor speedMax. speed
- 12. 6. Control Functions and Parameter Settings C13-B Pulse train output function C13-C Pulse frequency at 0% C13-D Pulse frequency at maximum frequency/speed C13-E Pulse train output parameter selection C13-F Output parameter absolute value calculation selection Refer to section 5-8-3 for details on the pulse train output function. C14-7, 8 A01, A02 output method selection C14-0, 1 A01, A02 output gain C14-3, 4 A01, A02 output offset (Voltage) C14-5, 6 A01, A02 output offset (Current) The block diagram for the control PCB analog outputs A01 and A02 is shown below. Internal parameter (Set C13-0) C14-0 (Note 1) C14-3 (Voltage output) C14-5 (Current output) (Note 1) + + AO1 COM Internal parameter (Set C13-1) C14-1 (Note 1) C14-4 (Voltage output) C14-6 (Current output) (Note 1) + + AO2 COM Gain Offset 6 – 146
- 13. 6. Control Functions and Parameter Settings (Note 1) The maximum output voltage for the A01 and A02 output is approx. 11V. Thus, even if the gain or offset are set to a large value, a voltage higher than this maximum level will not be output. Set the A01, A02 output method with C14-7, 8. C14-7, 8 = 1: Voltage output 0V to 10V = 2: Voltage output 0V to 10V (with 5V offset) = 3: Current output 4mA to 20mA When using A01, A02 for the voltage output (C14-7, 8 = 1 or 2), connect the control PCB A01/A02 L bit (W3, W4) to the voltage mode side. When using for the current output (C14- 7, 8 = 3), set the L bit to the current mode side. Refer to section 5-8 for details on this. When C14-7, 8 is set to 2, the parameter reference point is automatically set to 5V, and the output value gain is set to 0.5-fold. A gain can be applied on the internal parameter value set with C13-0, 1. Set this gain with C14-0, 1. When C14-7, 8 is set to 2 and the output gain is set with C14-0, 1, the gain will be (0.5 × C14-0, 1). Of the parameters selected with C13-0, 1, those shown below are coded with a plus/minus sign. When these parameters are selected, plus or minus can be added by offsetting the output value. Set C14-3, 4 for the voltage output, and C14-5, 6 for the current output. Setting value Parameter Full scale 0 Output frequency Max. frequency 1 Setting frequency Setting speed Max. frequency Max. speed 10 Motor speed Max. speed 11 Torque current Motor rated current × 2 12 Excitation current Motor rated current × 2 13 Actual motor rotation speed Max. speed 14 Namp output Rated torque × 2 An example of setting a 5V offset for the voltage output is shown below. If C14-7, 8 is set to 2, the offset amount when the offset is set with C14-3, 4 becomes (5V + C14-3, 4 setting value). 0V 10V 5V -100% 100% For offset 5V, gain 0.50 Meter output [V] Internal parameter value [%]0V 10V 100%-100% When offset is not set (Offset = 0V, gain = 1.00) Meter output [V] When offset is set Internal parameter value [%] (Note 2) If plus or minus is set with offset, the signal is not output from A01, A02 when the power is shut off, so the output will be 0V (-100% in above example). 6 – 147
- 14. 6. Control Functions and Parameter Settings C14-2 Random scale display coefficient Set the display value coefficient for the monitor parameter D00-4 (output frequency, speed random scale display) and D01-4 (set frequency, speed, ramp input random scale display. The result of multiplying the output frequency or set frequency, etc., with this setting value is displayed at D00-4, D01-4). C14-9~B AI1, AI2, AI3 random scale coefficient Set the random scale coefficient of the value displayed at monitor parameter D08-0 to 2 (analog input AI1, AI2, AI3 random scale display). 6 – 148