
Recommended
More Related Content
What's hot
What's hot (20)
Similar to Sonar
Similar to Sonar (20)
Recently uploaded
Recently uploaded (20)
Sonar
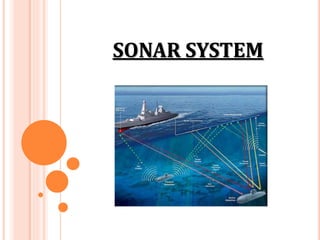
- 1. SONAR SYSTEM
- 2. INTRODUCTION Sonar (SOUND NAVIGATION AND RANGING) Sonar is a technique that uses sound propagation to navigate, communicate with or detect objects on or under the surface of the water, such as vessels, boats, ships and objects.
- 3. HISTORY OF SONAR: Some animals (dolphins, bats, some shrews, and others) have used sound for communication and object detection for millions of years, use by humans in the water is initially recorded by Leonardo da Vinci in 1490: a tube inserted into the water was said to be used to detect vessels by placing an ear to the tube
- 6. APPLICATIONS OF SONAR TECHNOLOGY THE BASIC USE OF SONAR TECHNOLOGY IS TO ESTIMATE THE DEPTH, RANGE, AND DIRECTION OF ARRIVAL OF OBJECTS. FOLLOWING ARE THE VARIOUS DIFFERENT APPLICATIONS OF SONAR TECHNOLOGY: - SPECIAL SONARS ARE USED IN SHIPS AND SUBMARINES FOR UNDERWATER COMMUNICATIONS. - MEDICAL IMAGING FOR THE DETECTION OF CYSTS AND CANCER CELLS ARE DONE USING SONAR AND THIS METHOD IS KNOWN AS SONOGRAM. - IT IS USED FOR THE DETECTION OF ENEMY VESSELS AND TORPEDO BY THE MILITARY. - SONAR ALSO FINDS APPLICATION IN INSPECTING PIPELINES THAT CARRY OIL AND GAS FOR DETECTING POSSIBLE DAMAGES.
- 7. TYPES OF SONAR: There are two types of sonar:— Active sonar Passive sonar
- 8. Active Sonar
- 9. There are 3 modes of operation for active sonar: 1. MONOSTATIC MODE:
- 12. BLOCK DIAGRAM OF ACTIVE SONAR
- 13. Active sonar uses sound transmitter and receiver .And there are 3 modes of operation : 1. Monostatic mode 2. Bistatic mode 3. Multistatic mode Monostatic mode : when the transmitter and receiver are at the same place. Bistatic mode : when the transmitter and receiver are separated by some distance. Multistate mode : When more transmitters (or more receivers) are used, again spatially separated.
- 14. Transmitter : The transmitter generates the outgoing pulse. It determines pulse width, pulse reception frequency, modulation and carrier frequency. Transducer array : The individual transducers are simple elements with little or no directionality. They are arranged in an array to improve the directivity index, which improves the figure-of- merit by noise reduction. Beamforming processor: The input/output of each transducer is put through a ,Beamforming processor which applies time delays or phase shifts to each of the signals in such a way as to create a narrow beam in a particular direction. Duplexer switch : it is a switch that toggles between transmitter and receiver. Synchronizer : Provides overall coordination and timing for the system. Reset the display for each new pulse in order to make range measurements. Receiver : Collects the received energy. The receiver may also demodulate the return if frequency modulation is used on transmission Display : Puts all of the detection information into a visual format. There are several types: 1. A-scan : the signal along a single beam for a portion of the listening cycle. A target appears as a raised section if it is in the beam. 2. PPI(plan position indicator) : A top-down (geographic view). The sonar system must sequentially search individual beams which are displayed in their true or relative form. The strength of the return is represented
- 15. Following are the features of Active Sonar system. • It consists of transmitter and receiver both. • Active sonar transmits sound waves towards the object and receives reflected waves from it. Active Sonar sounds are emitted in pulse forms and it listens for the echo after transmission. • The reflected waves are used to detect the object and measure its distance. • As active sonar transmits sound waves in the sea, it is considered to be harmful for the marine life. • Active sonar has capability to detect vessels which are quiet and are difficult to be detected by passive sonar as explained below. • Active sonar can detect marine mammals in shipping lanes or in high sound pressure zones.
- 16. Passive Sonar
- 17. PASSIVE SONAR SYSTEMS. The main difference between passive and active sonar is that a passive sonar system do not emit any signals. In this the target itself is the source of the energy which propagates to the receiver.
- 18. Block diagram of passive sonar:
- 19. HYDROPHONE ARRAY. THESE ARE THE SENSITIVE ELEMENTS WHICH DETECT THE ACOUSTIC ENERGY EMITTED FROM THE TARGET. AGAIN, THEY ARE ARRANGED INTO AN ARRAY TO IMPROVE THE BEAMWIDTH. COMMON CONFIGURATIONS ARE CYLINDRICAL OR SPHERICAL. THE CYLINDRICAL ARRAY OPERATES AT A FIXED VERTICAL ANGLE, USUALLY DOWNWARD. THE SPHERICAL ARRAY, WHICH IS COMMON ON SUBMARINES, HAS A MUCH WIDER VERTICAL FIELD-OF-VIEW. SINCE THE SUBMARINE MAY BE BELOW WHAT IT IS TRACKING, THE ARRAY MUST BE ABLE TO LOOK UPWARDS TO SOME EXTENT. THE LARGE DOWNWARD ANGLES ARE ONLY USED FOR BOTTOM BOUNCE DETECTION. USING A BEAMFORMING PROCESSOR (DESCRIBED BELOW) THE FIELD-OF-VIEW IS BROKEN DOWN INTO INDIVIDUAL BEAMS IN THE VERTICAL AND AZIMUTHAL DIRECTIONS. BEAMFORMING PROCESSOR. UNLIKE ACTIVE SYSTEMS WHICH TRANSMIT AND RECEIVE IN A SET DIRECTION, THE PASSIVE SYSTEM MUST LISTEN TO ALL ANGLES AT ALL TIMES. THIS REQUIRES A VERY WIDE BEAMWIDTH. AT THE SAME TIME, A NARROW BEAMWIDTH IS REQUIRED FOR LOCATING THE SOURCE AND REJECTING AMBIENT NOISE. THESE TWO OBJECTIVES ARE ACHIEVED SIMULTANEOUSLY BY THE PASSIVE BEAMFORMING PROCESSOR. THE IDEA IS VERY SIMILAR TO THE ACTIVE SYSTEM. THE PASSIVE BEAMFORMING PROCESSOR APPLIES A UNIQUE SET OF TIME DELAYS/PHASE SHIFTS TO THE SIGNAL TO CREATE A PARTICULAR BEAM. THE DIFFERENCE IN A PASSIVE SYSTEM IS THAT THIS PROCESS IS REPEATED SEVERAL TIMES, EACH WITH A DIFFERENT SET OF TIME DELAYS/PHASE SHIFTS, IN ORDER TO LISTEN TO MANY NARROW BEAMS NEARLY SIMULTANEOUSLY. THE RESULT IS A SET OF BEAMS THAT COVER THE FIELD-OF-VIEW OF THE ARRAY.
- 20. BROADBAND DISPLAY. THE OUTPUT OF THE BEAMFORMING PROCESSOR IS DISPLAYED AS A BEARING TIME HISTORY (BTH):THE NEWEST INFORMATION IS AT THE TOP OF THE DISPLAY. THE BEAMWIDTH OF THE SYSTEM DETERMINES HOW ACCURATELY THE BEARING CAN BE MEASURED BY SUCH A DISPLAY. A COMMON BEAMWIDTH IS ABOUT 5O. THE TOTAL AMOUNT OF TIME DISPLAYED FROM TOP TO BOTTOM CAN BE CONTROLLED (TO SOME EXTENT). A QUICKLY UPDATING DISPLAY THAT ONLY KEPT INFORMATION FOR A FEW MINUTES WOULD BE USEFUL FOR CLOSE CONTACTS WHOSE BEARINGS ARE CHANGING RAPIDLY. ON THE OTHER HAND, A LONG TIE HISTORY IS MORE USEFUL FOR DETECTING LONG RANGE CONTACTS, WHOSE BEARINGS ARE ONLY CHANGING SLOWLY. NARROWBAND DISPLAY. FOR A PARTICULAR BEAM, THE TIME HISTORY OF THE FREQUENCY IS CALLED A WATERFALL DISPLAY. THIS CAN BE USED TO GAIN ADDITIONAL INFORMATION FROM A CONTACT WHICH IS ALREADY BEING TRACKED BY ANOTHER SYSTEM. IN ORDER TO SEARCH FOR CONTACTS ON THE BASIS OF NARROWBAND INFORMATION ALONE REQUIRES A DIFFERENT TYPE OF DISPLAY. ONE POSSIBILITY IS TO SIMULTANEOUSLY DISPLAY SEVERAL DIFFERENT BEAMS, EACH SHOWING A MINI- WATERFALL DISPLAY, WHICH ARE CALLED GRAMS. FREQUENCY ANALYZER. THE FREQUENCY ANALYZER BREAKS THE SIGNAL INTO SEPARATE FREQUENCIES. THIS IS THE SPECTRUM OF THE SIGNAL. FOR PROCESSING PURPOSES, THE FREQUENCIES ARE DIVIDED INTO SMALL BANDS KNOWN AS FREQUENCY BINS. THE WIDTH OF EACH BIN IS CALLED THE ANALYSIS BANDWIDTH.
- 21. Although active sonar was used by surface craft in World War II, submarines avoided the use of active sonar due to the potential for revealing their presence and position to enemy forces. However, the advent of modern signal-processing enabled the use of passive sonar as a primary means for search and detection operations. Passive sonar has several advantages : • It is silent. • If target radiated noise level is high, it can have a greater range than active sonar.
- 22. Following are the features of Passive Sonar system. • It consists of receiver part only. • It does not transmit sound waves but receives sound waves emitted by sea animals used for communication. It also receives other vibrations. Basically passive sonar is used for detection of noise made by others (engines, propellers, animals etc.). • Passive Sonar keeps large sonic database. Moreover sonar operator classifies signals by use of computer and uses stored databases in order to identify classes of ships and take action accordingly. • As it does not transmit waves, it is considered to be safe for sea animals compare to active sonar type.
- 23. Presented By: • Sanskruti solkar • Khushi singh • Pranali salvi • Sakshi shelar THANK YOU Feel free to ask us about your doubts.