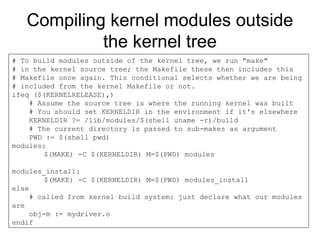

![Module related tools
• insmod <module.ko> [module parameters]
– Load the module
• rmmod
– Unload the module
• modprobe [-r] <module name>
– Load the module specified and modules it depends
– Unload the module specified and other modules it depends if
they have no other user
• lsmod
– List all modules loaded into the kernel
• depmod
– Regenerate module dependency information](https://image.slidesharecdn.com/kernelmodules-170629154108/85/Linux-kernel-modules-9-320.jpg)
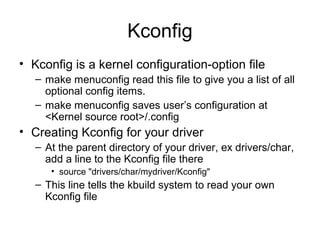
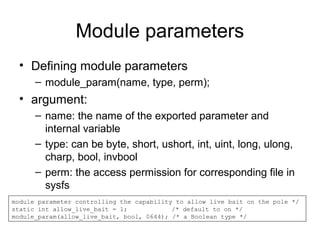
![Module parameters
• module_param_named(name, variable, type, perm);
– Different name for parameter and variable
• module_param(strptr, charp, 0)
– Kernel copy the string from the user space and assign strptr to
point to it
• module_param_string(name, string, len, perm);
– Kernel copy parameter string into the buffer you provide
• module_param_array(name, type, nump, perm);
– Comma-separated list of parameters can be stored in an array
static int fish[MAX_FISH];
static int nr_fish;
module_param_array(fish, int, &nr_fish, 0444);
static char species[BUF_LEN];
module_param_string(specifies, species, BUF_LEN, 0);](https://image.slidesharecdn.com/kernelmodules-170629154108/85/Linux-kernel-modules-15-320.jpg)

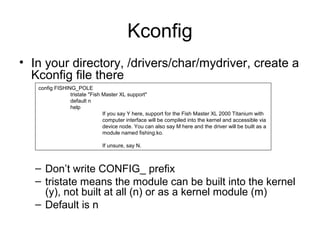
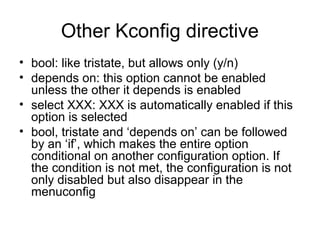
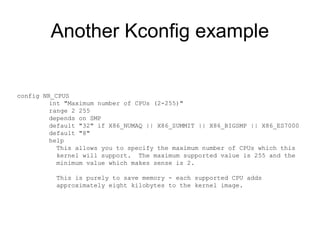
This document discusses kernel modules in Linux. Key points include: - Kernel modules can be loaded and unloaded at runtime to extend kernel functionality without recompiling. This saves memory and allows hardware-specific modules. - A basic "Hello World" module is presented to demonstrate initializing and exiting functions. - Compiling modules inside or outside the kernel tree is described. Tools for loading, uninstalling, and listing modules are also covered. - The document explains how to define module parameters and export symbols for other modules to use. Kconfig files are used to configure modules.