Download as PDF, PPTX
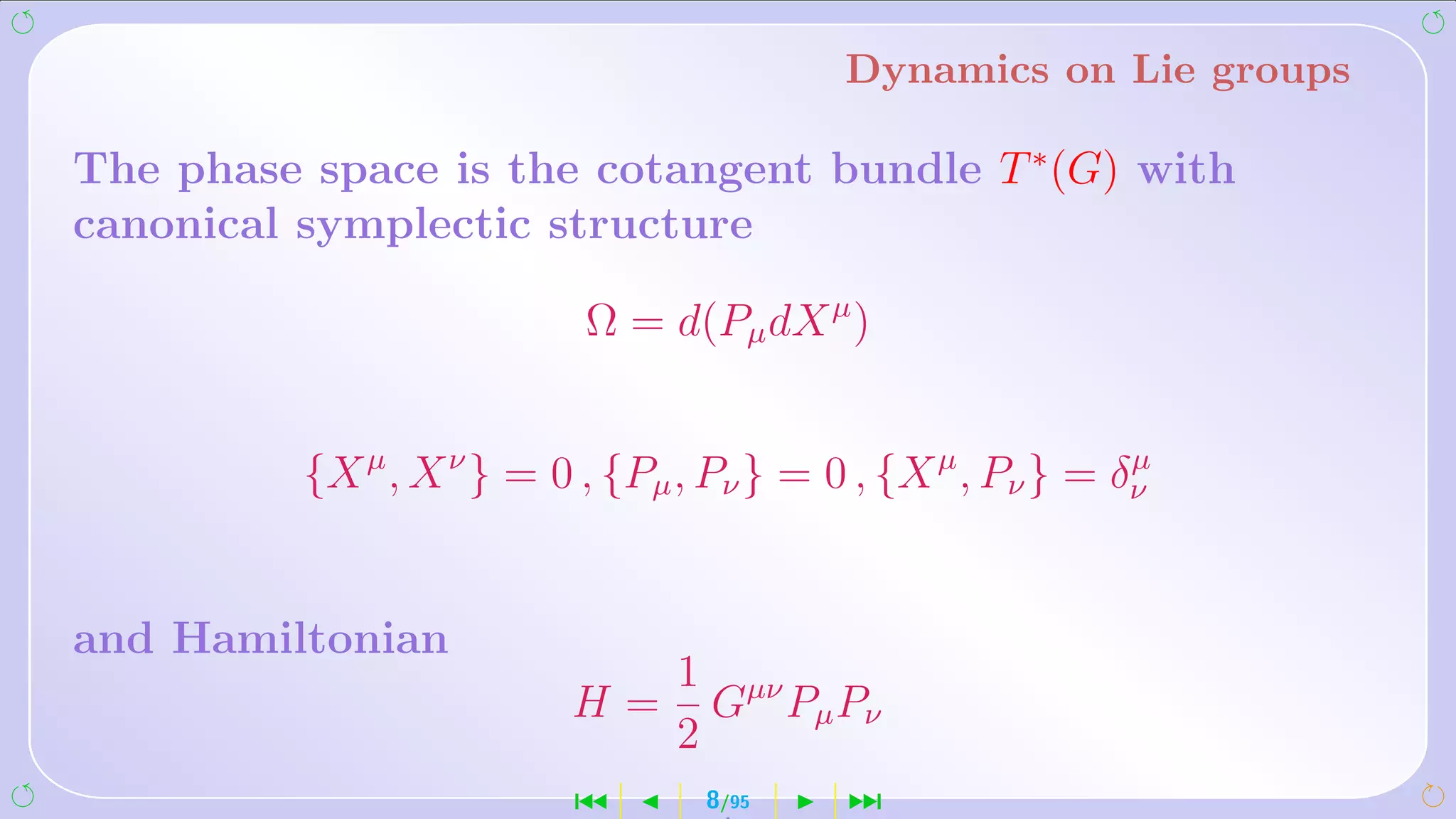
![Dynamics on Lie groups
The Lie-Poisson brackets are
{F, H} = x, [ F (x), H(x)] ,
∂F ∂H
k
{F, H} = Cij xk , x ∈ A∗ (G)
∂xi ∂xj
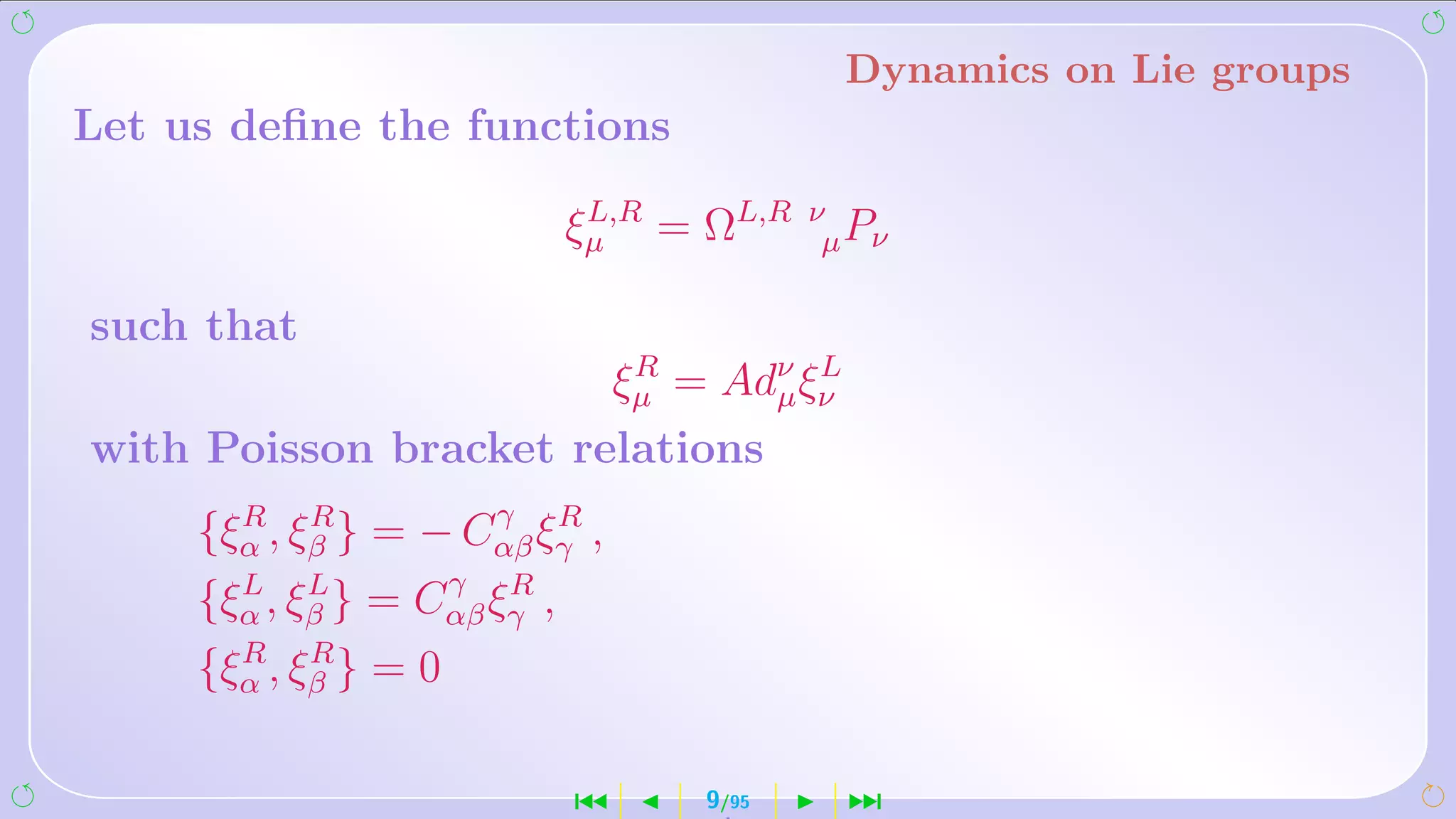
The left and right invariant 1-forms obey the First structure
Cartan equation
dω L + ω L ∧ ω L = 0 ,
dω R − ω R ∧ ω R = 0
´ 6/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-6-2048.jpg)
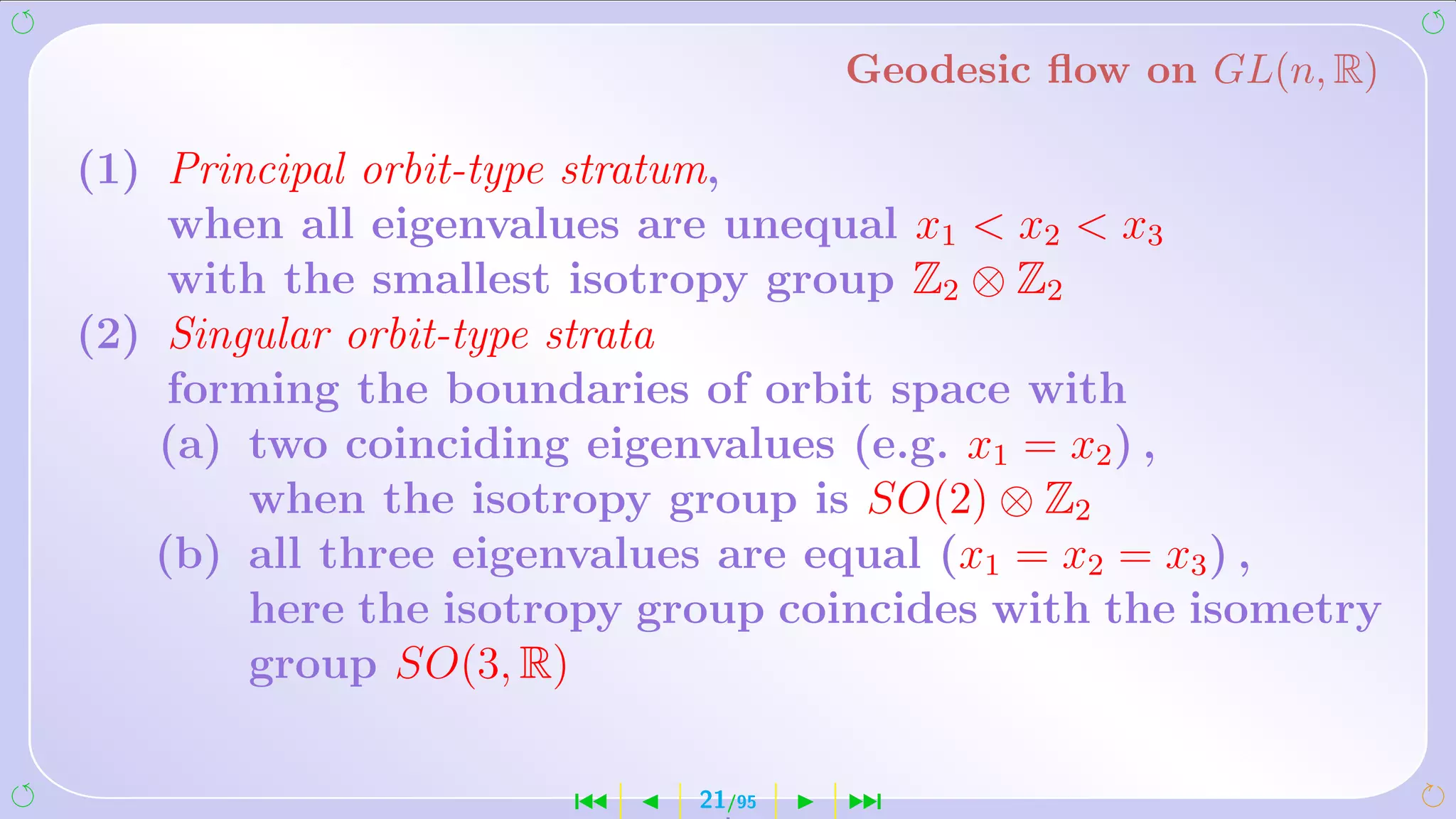
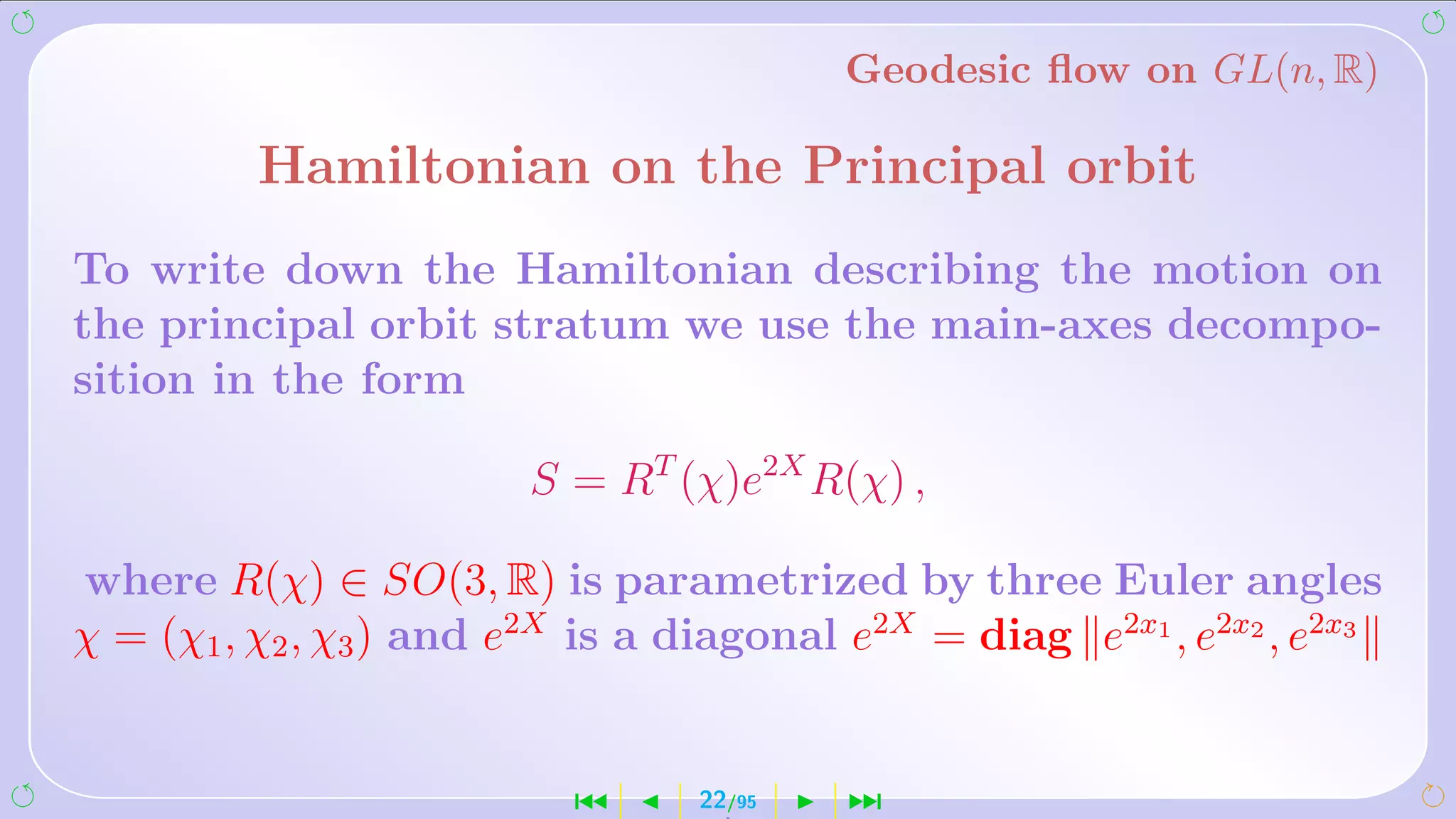
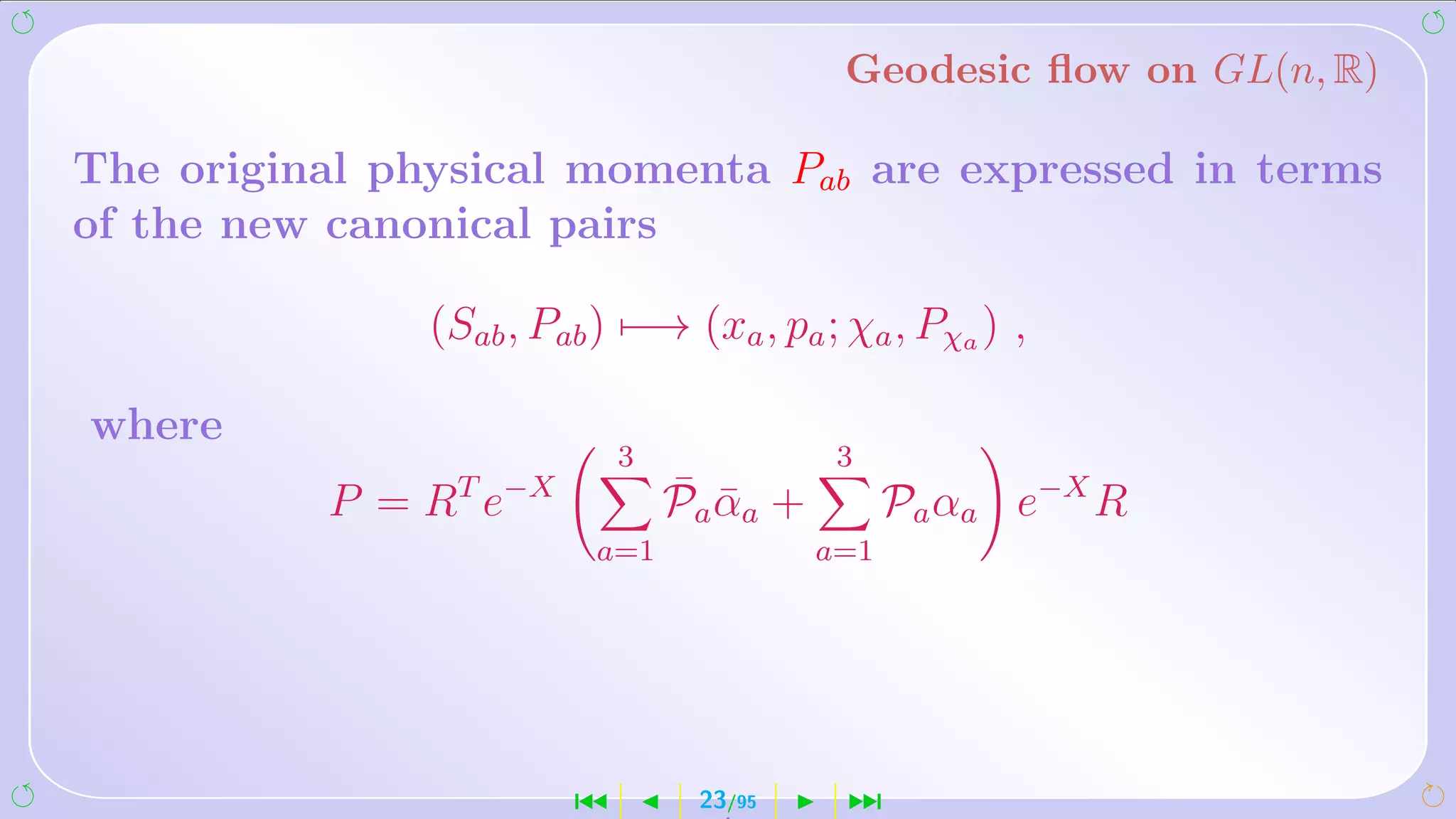
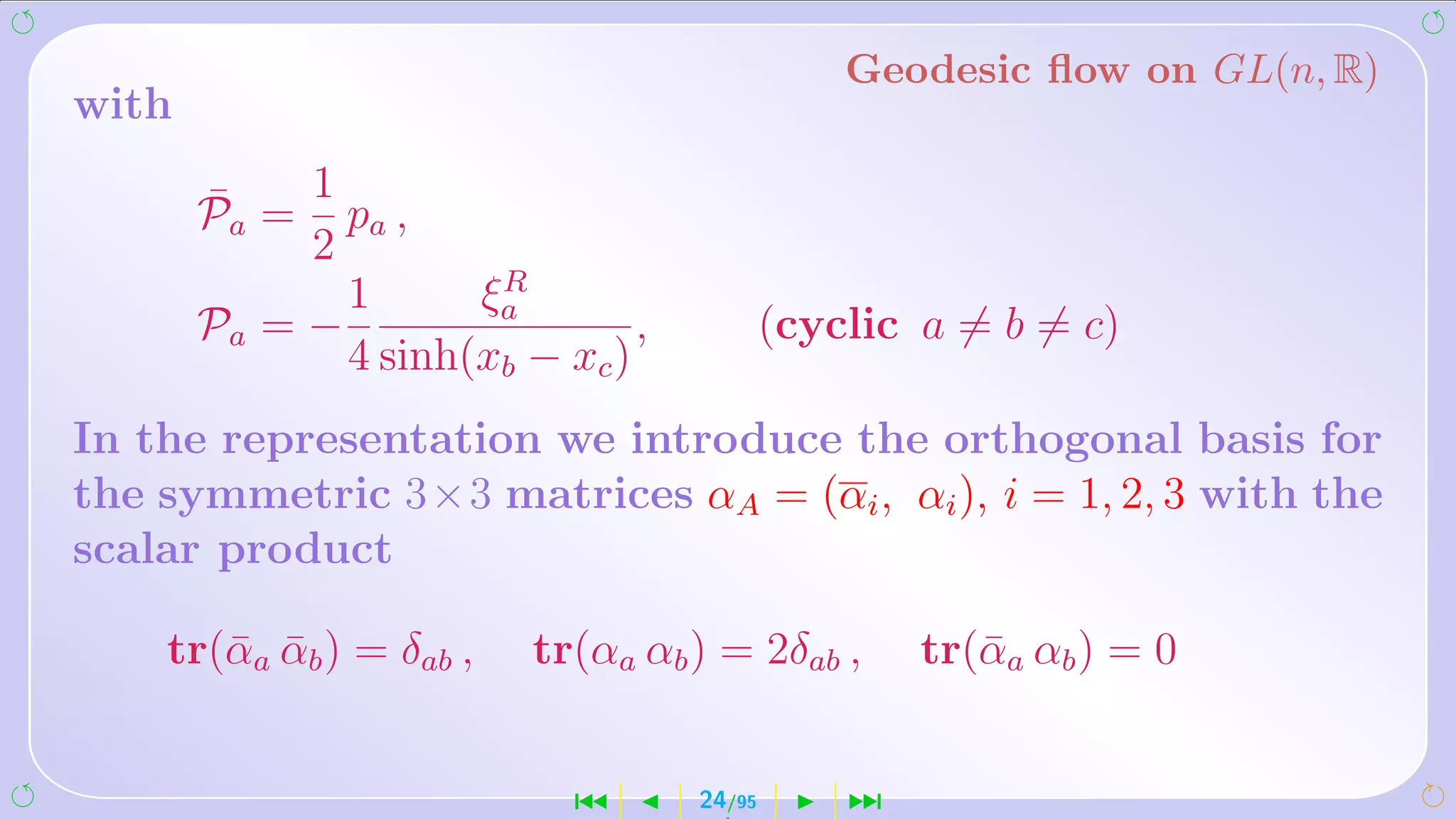
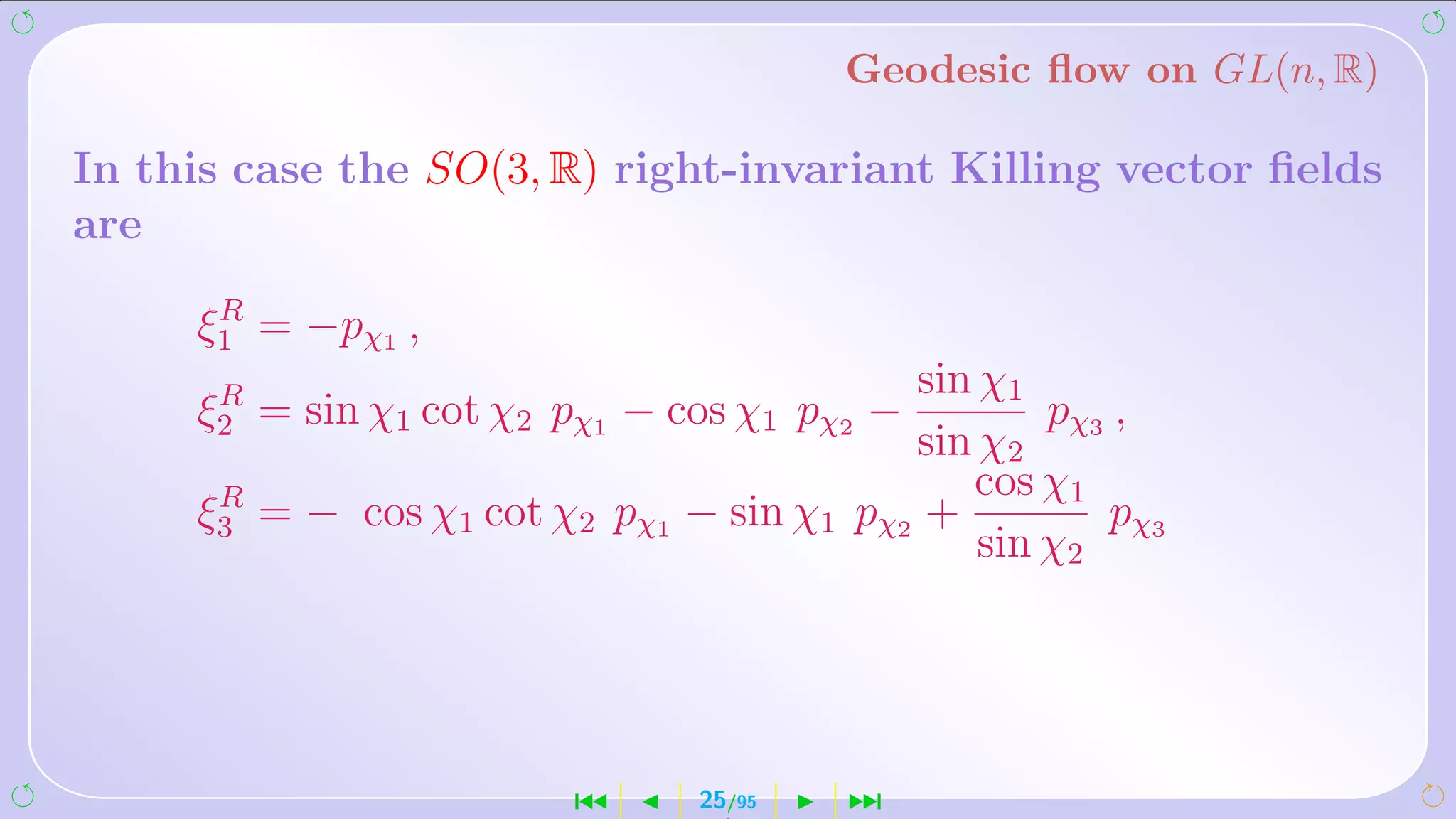
![Geodesic flow on GL(n, R) group manifold
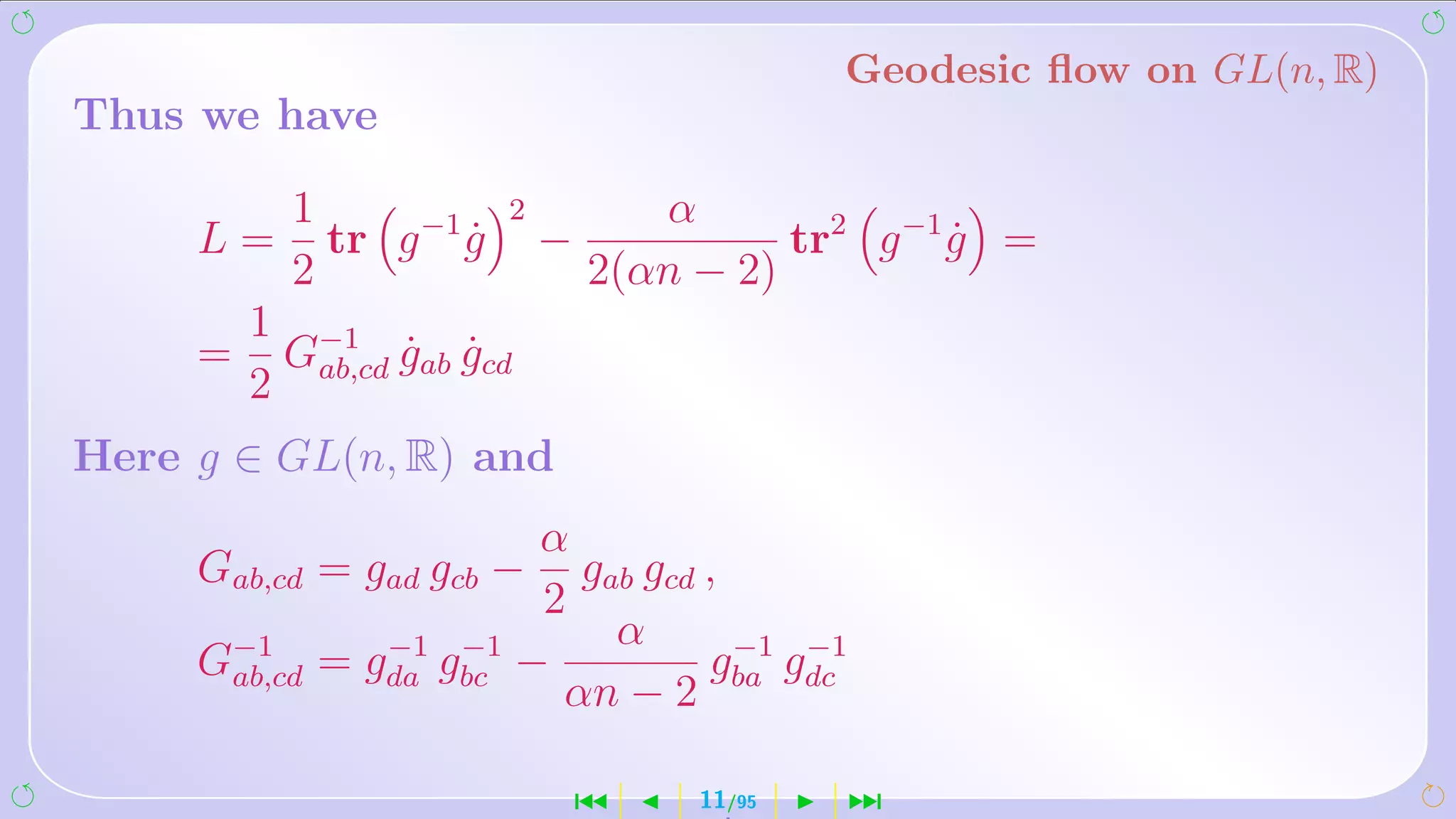
Let us consider the Lagrangian
1
L= ω, ω , ω ∈ gl(n, R)
2
which is defined by the following one parameter family of
non-singular metrics on GL(n, R) group manifold
α
X , Y = TrXY − TrX TrY ,
αn − 2
where X, Y ∈ gl(n, R) and α ∈ [0, 1]
´ 10/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-10-2048.jpg)
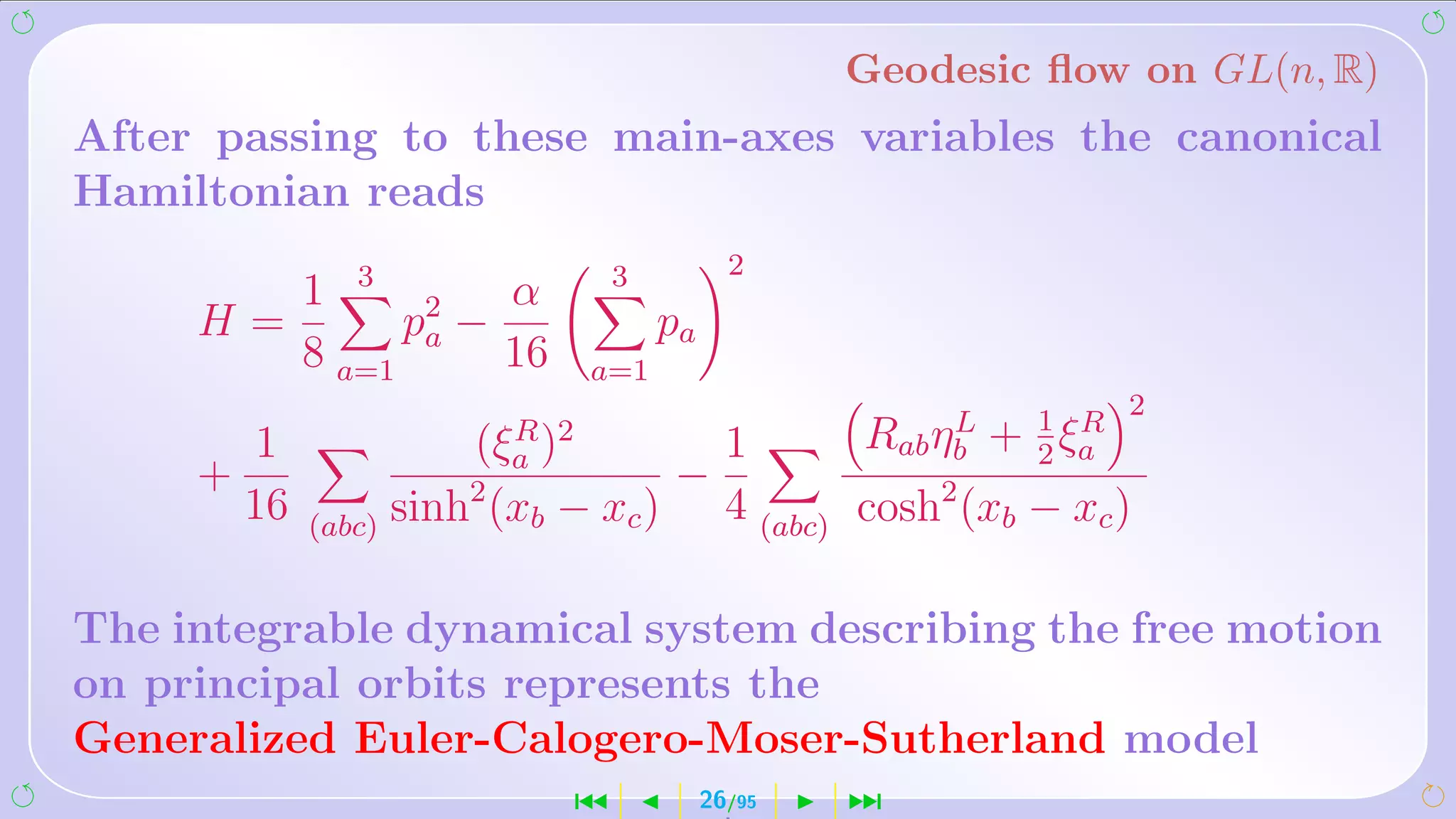
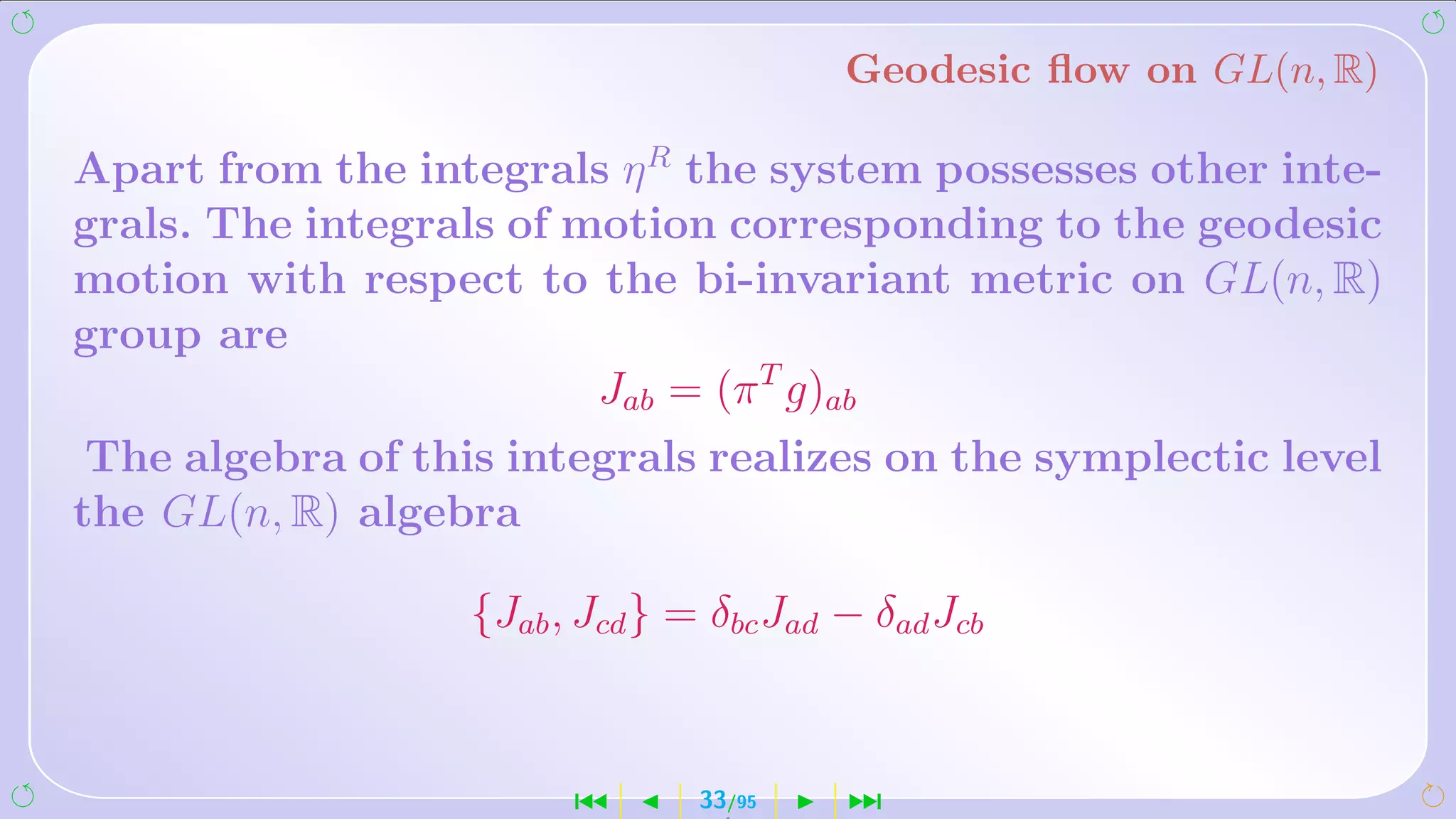
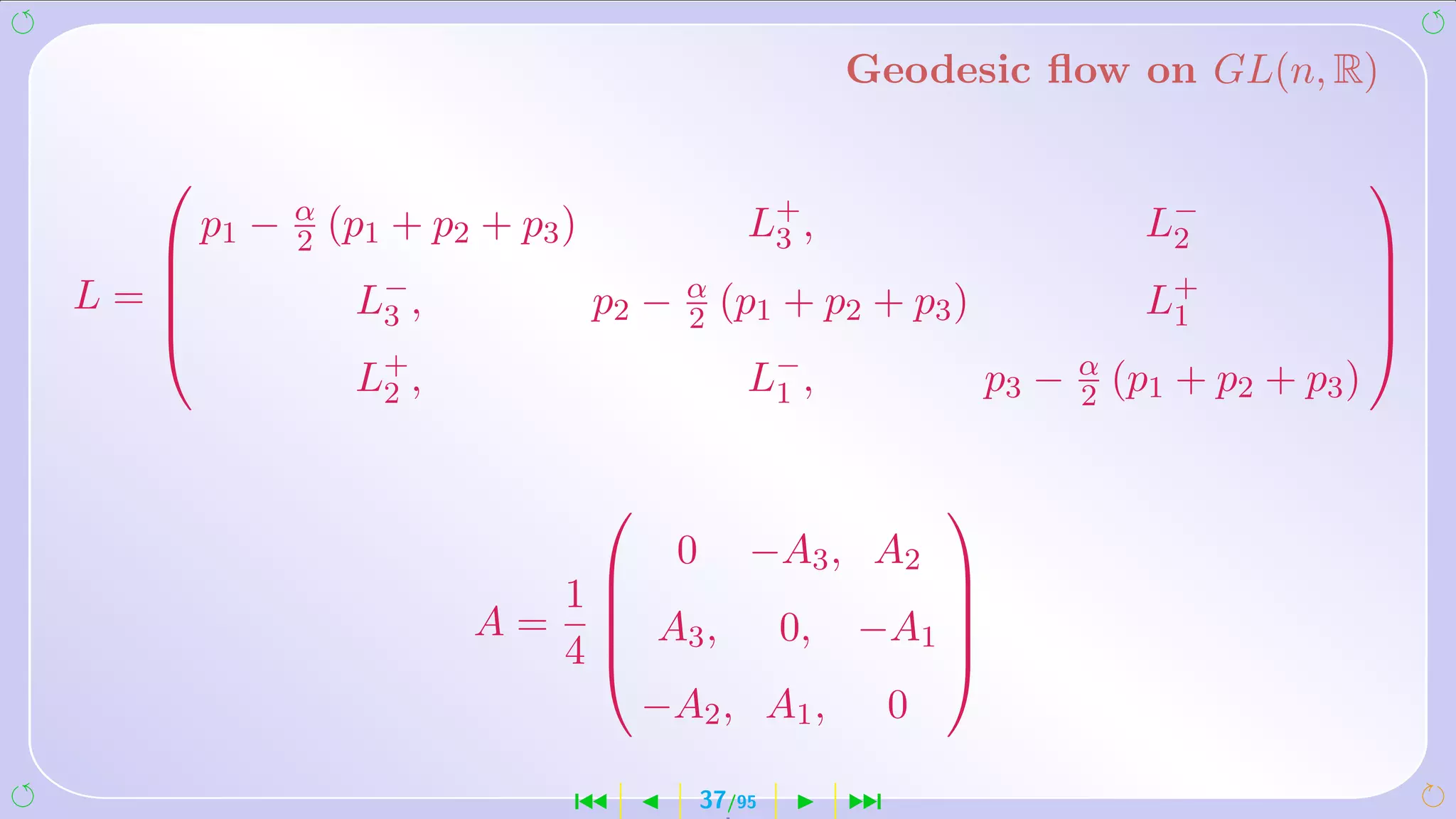
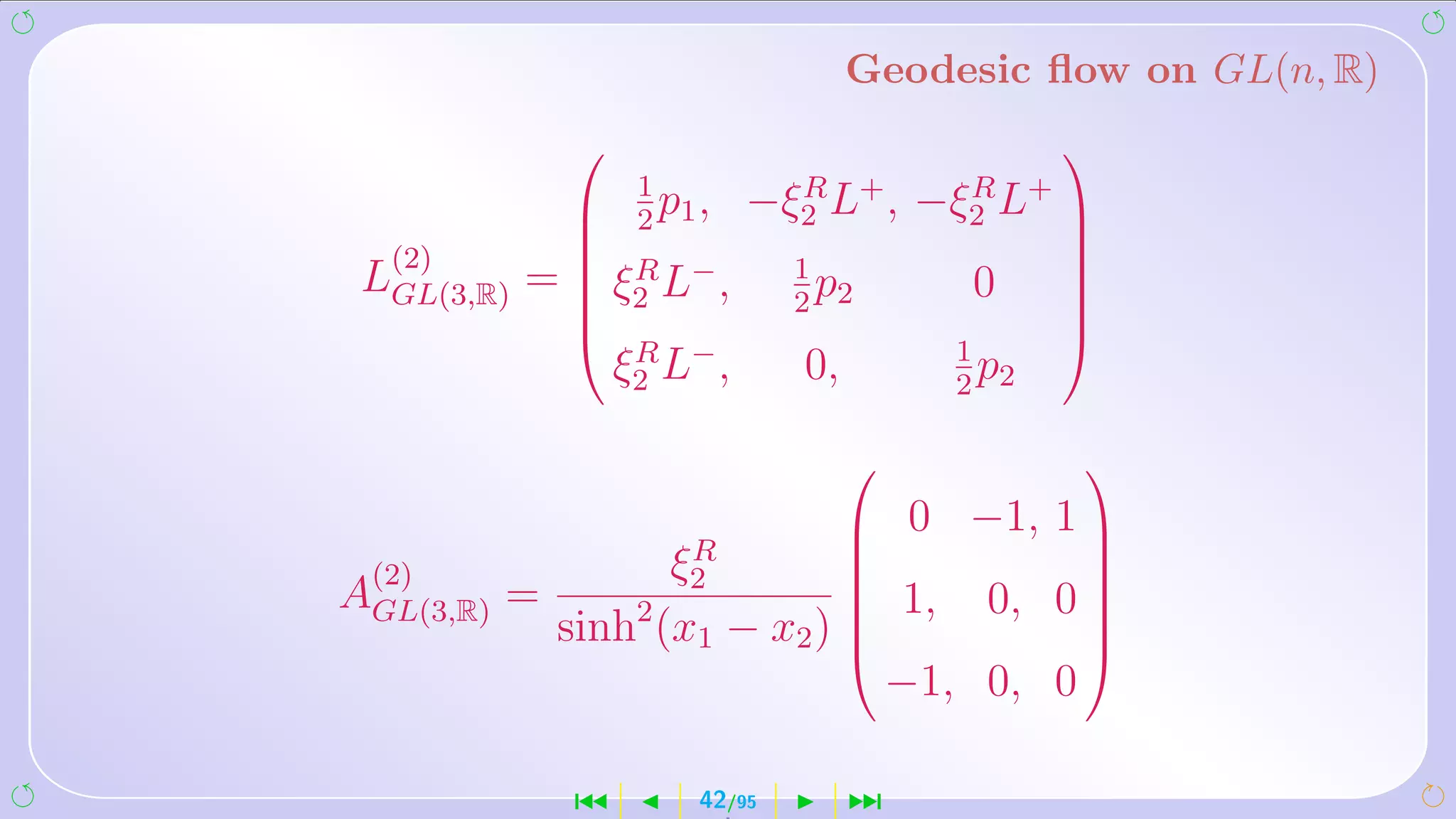
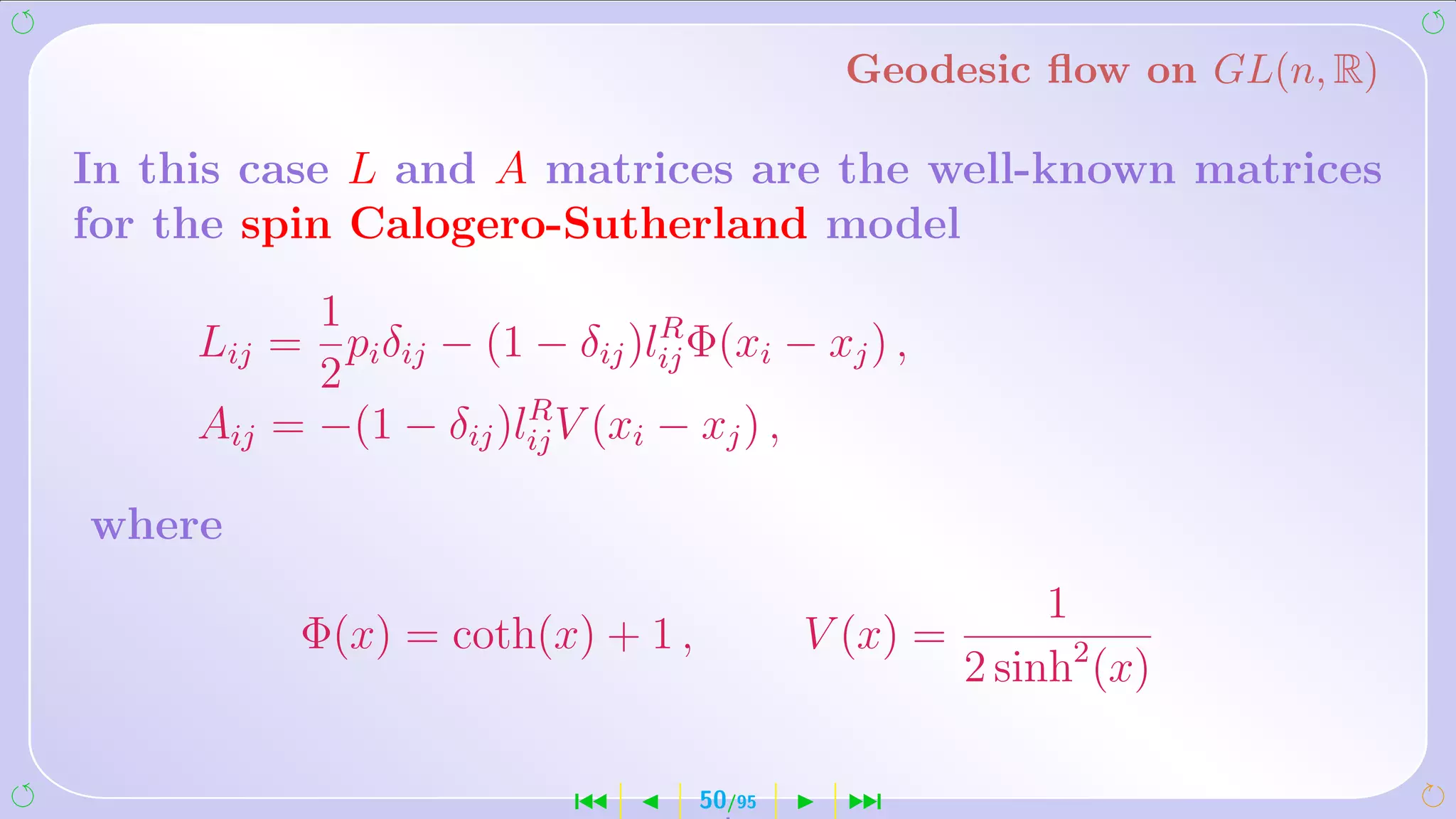
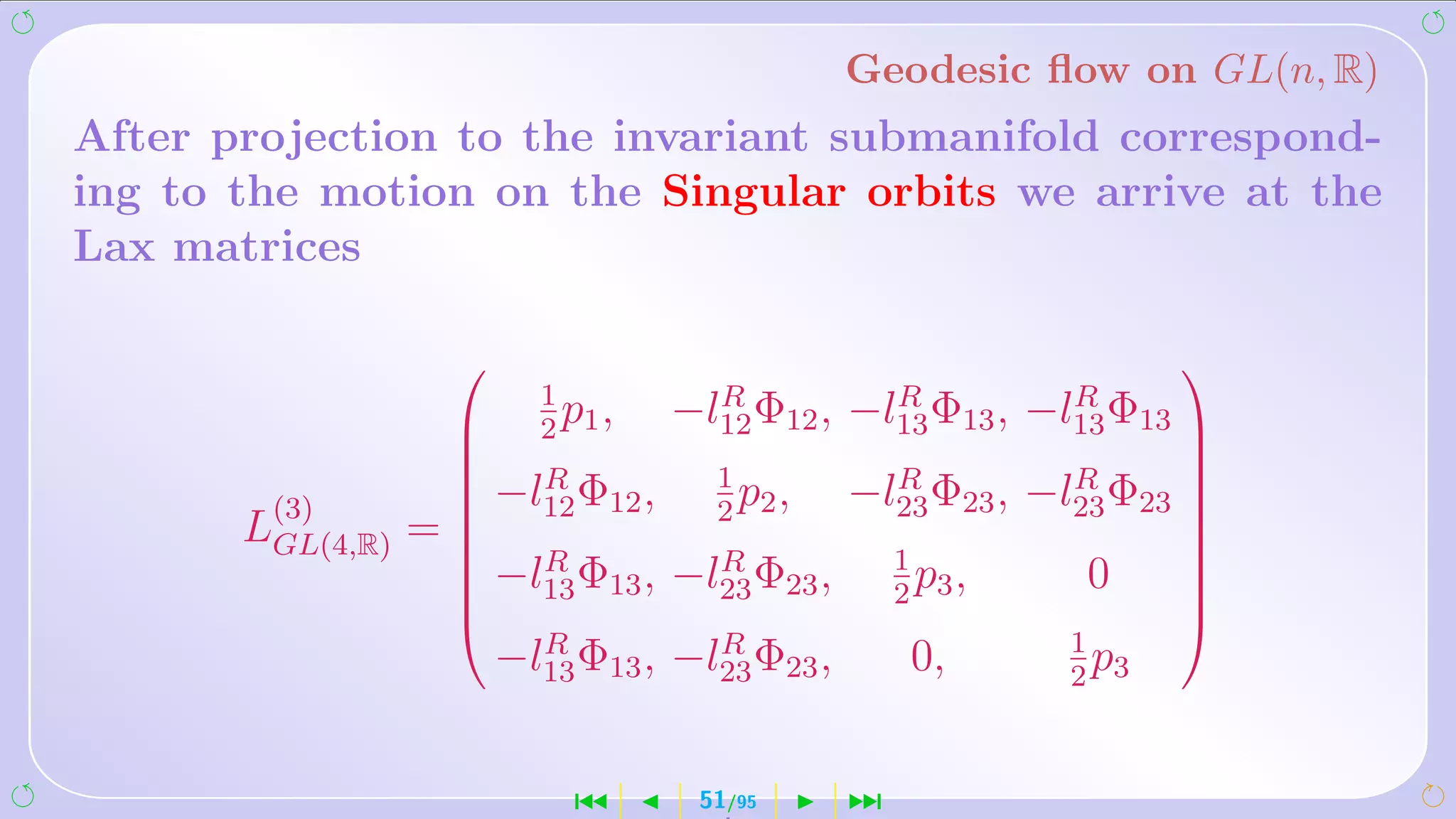
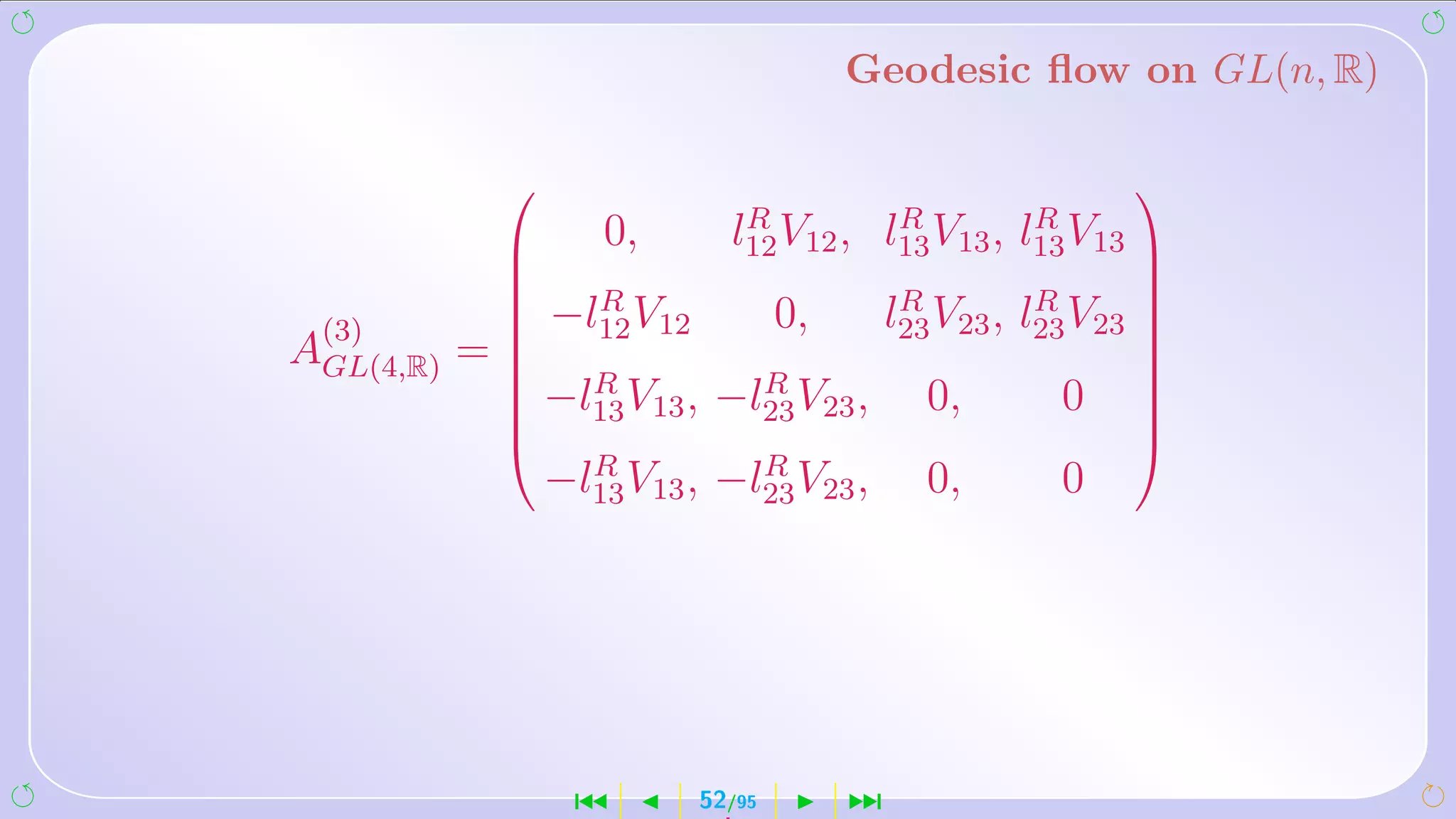
![Geodesic flow on GL(n, R)
Lax representation for the Pseudo-Euclidean
Euler-Calogero-Moser model
The Hamiltonian equations of motion can be written in a
Lax form
˙
L = [A, L] ,
where the 3 × 3 matrices are given explicitly as
´ 36/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-36-2048.jpg)
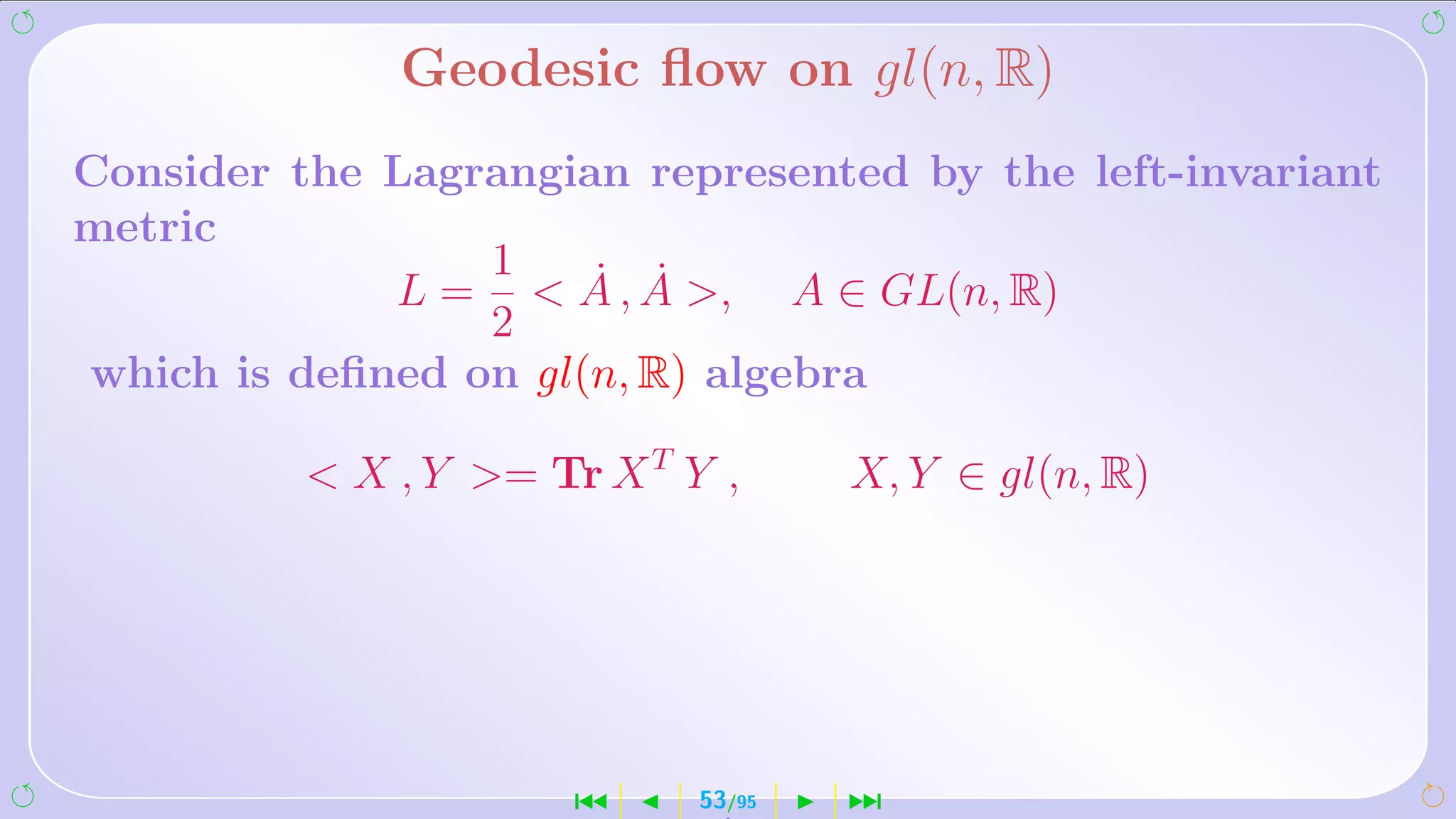
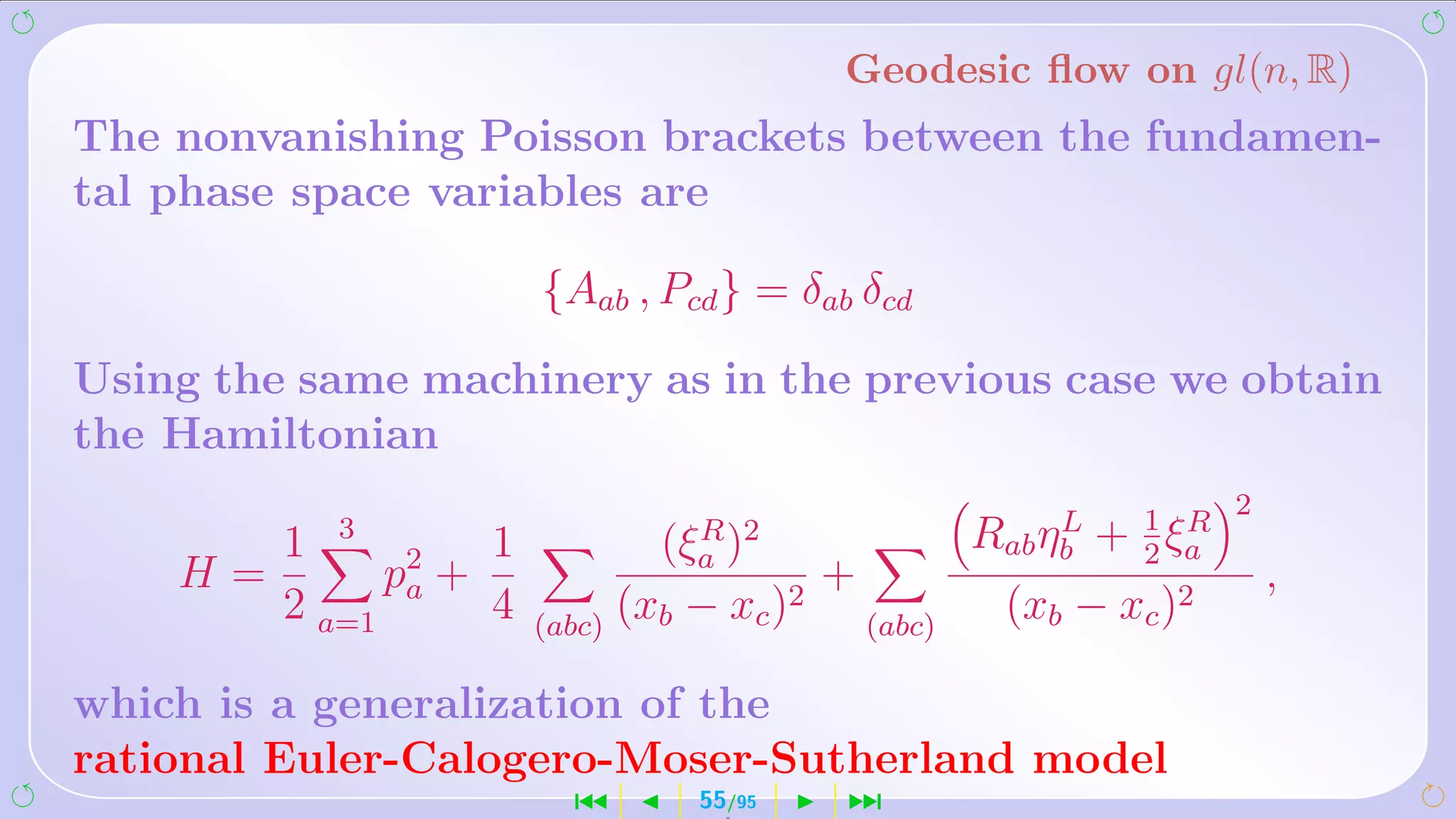
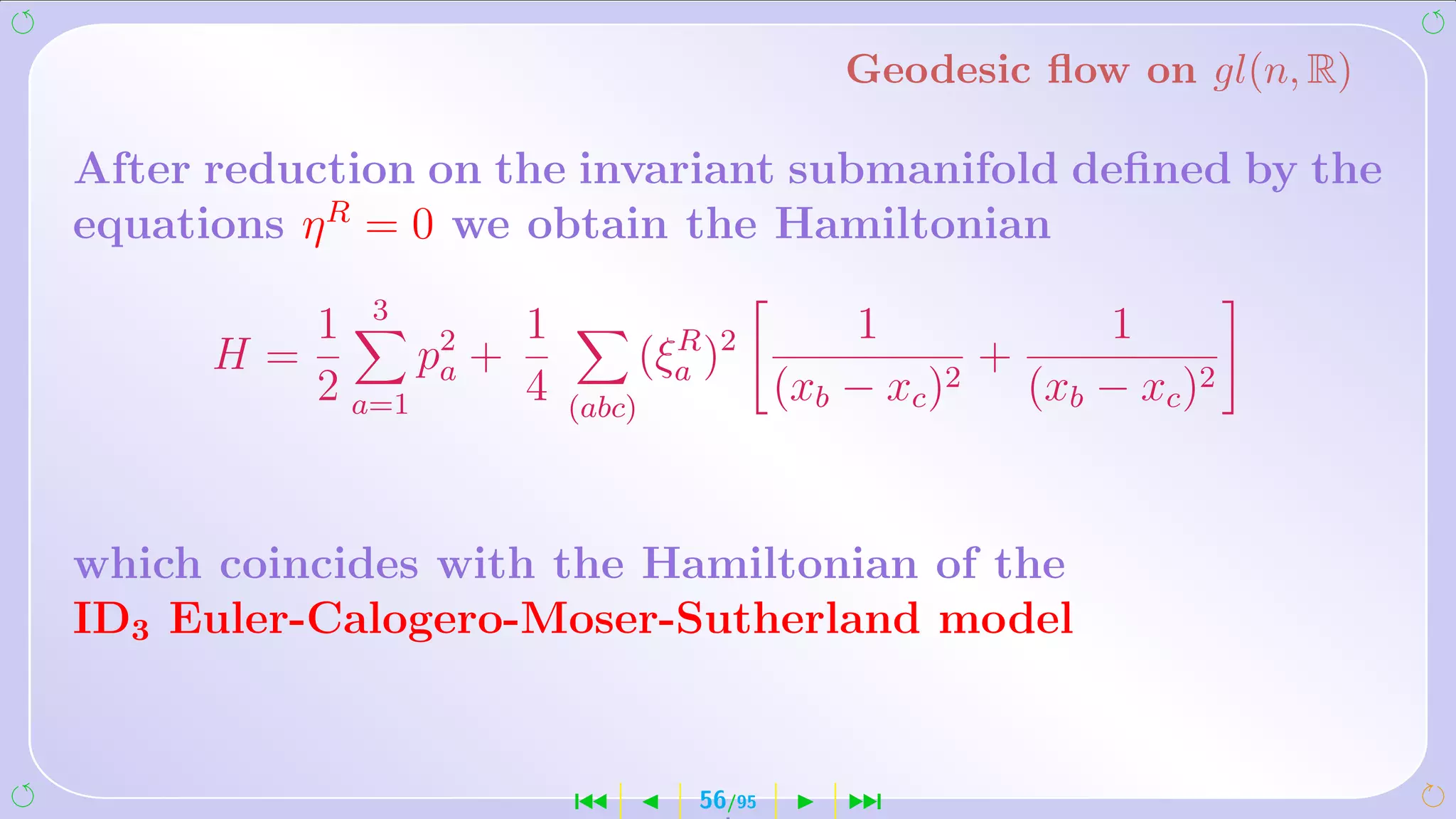
![Geodesic flow on gl(n, R)
The obviously conserved angular momentum
˙
µ = [A , A]
leads to the possibility to integrate the equations of motion
¨
A = 0 in the form A = at + b. The canonical Hamiltonian cor-
responding to L is
1 2
H= tr P T P
2
´ 54/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-54-2048.jpg)
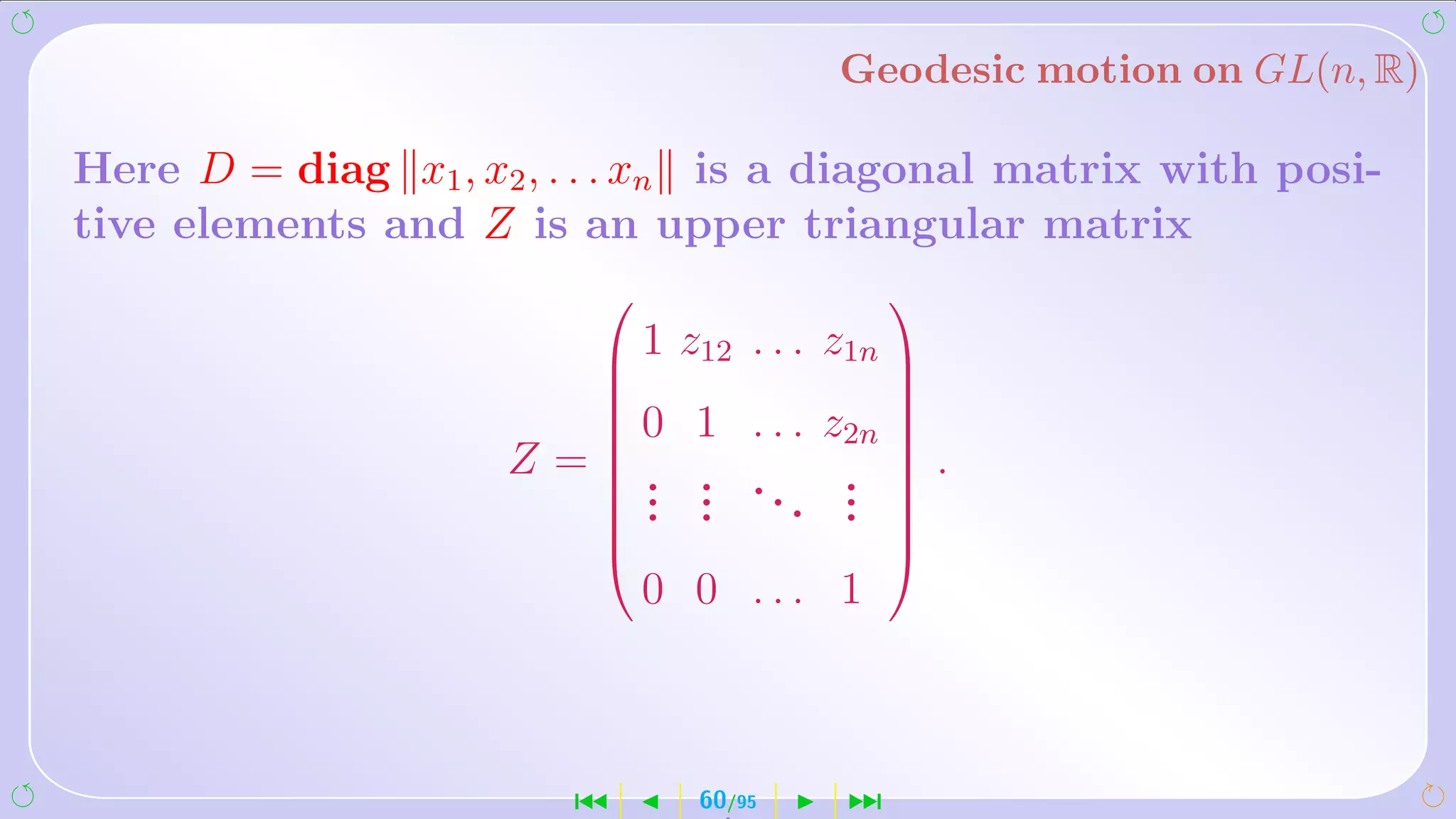
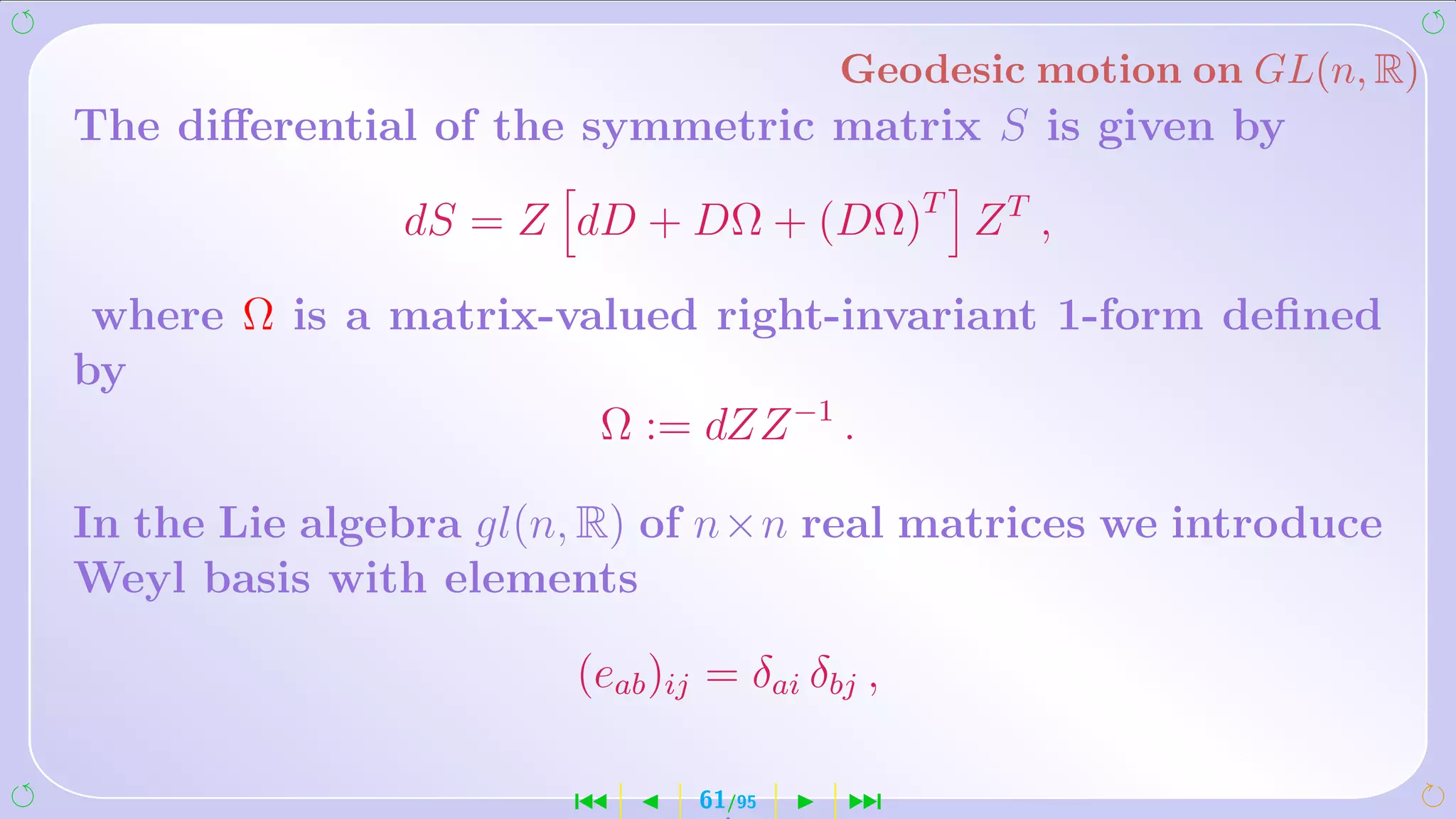
![Geodesic motion on GL(n, R)
Forty years after the famous papers of
M. Toda
Journal of Physical Society of Japan 20 (1967) 431
Journal of Physical Society of Japan 20 (1967) 2095
The Hamiltonian of the non-periodic Toda lattice is
1 n 2 n−1
HN P T = p + g2 exp [2(xa − xa+1 )] ,
2 a=1 a a=1
and the Poisson bracket relations are
{xi , pj } = δij .
´ 57/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-57-2048.jpg)
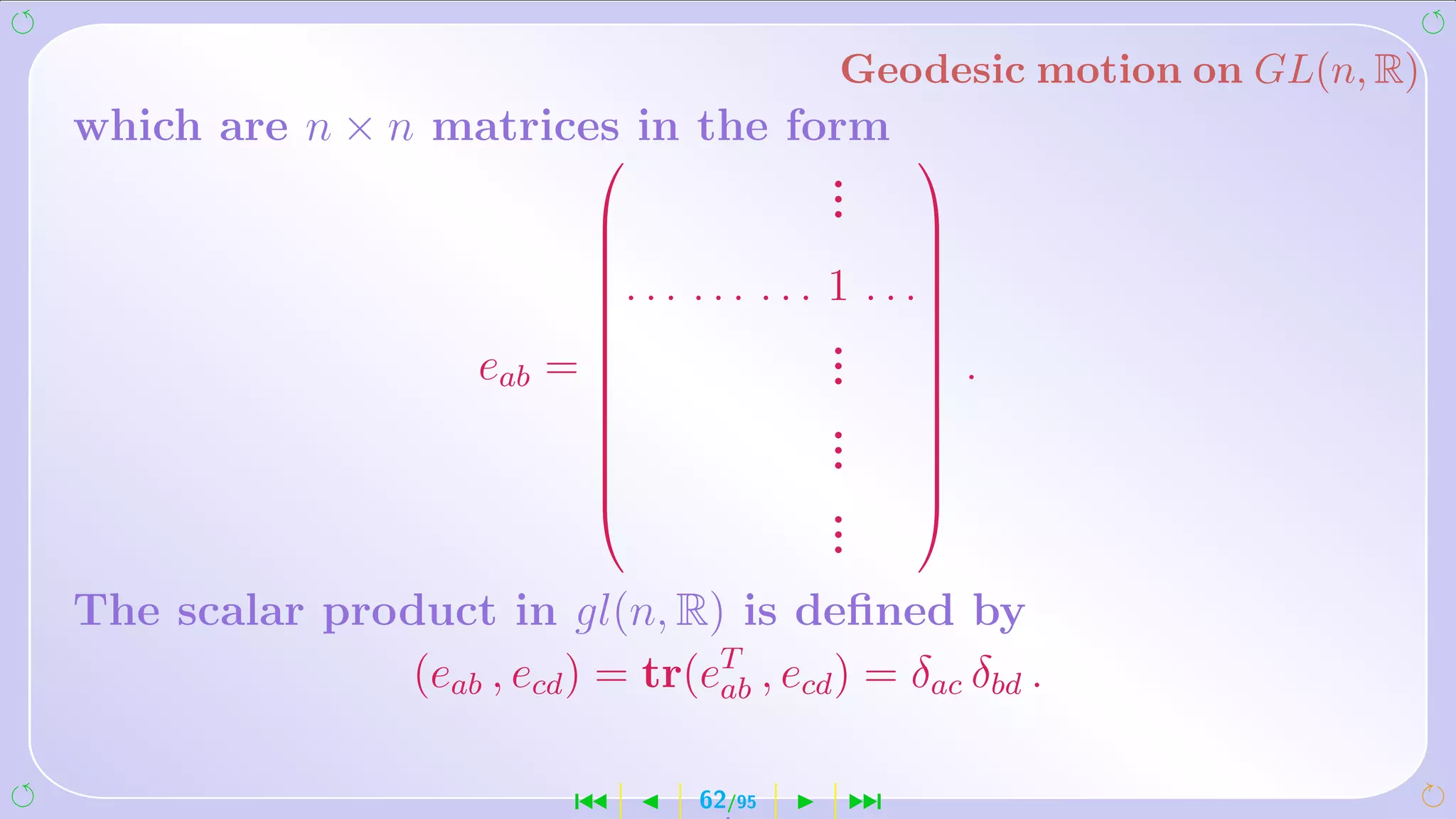
![Geodesic motion on GL(n, R)
The equations of motion for the non-periodic Toda lattice
are
xa = pa , a = 1, 2, . . . , n ,
˙
pa = −2 exp [2(xa − xa+1 )] + 2 exp [2(xa−1 − xa )] ,
˙
p1 = −2 exp [2(x1 − x2 )] ,
˙
pn = −2 exp [2(xn−1 − xn )] ,
˙
and for the periodic Toda lattice
xa = p a ,
˙
pa = 2 exp [2(xa−1 − xa )] − exp [2(xa − xa+1 )] .
˙
´ 58/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-58-2048.jpg)
![such that
[eα , eβ ] = C µαβ eµ ,
where C µαβ are the basis structure functions. The symmetric
metric is
g = gµν ω µ ⊗ ω ν , g −1 = g µν eµ ⊗ eν
We suppose that on the manifold (M, g) is defined affine
connection
Γµν = Γµνα ω α ⇐⇒ Γµβα = ω µ , eα eβ
In manifold with affine connection we can construct the
´ 74/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-74-2048.jpg)
![bilinear antisymmetric mapping
T (X, Y ) = X Y − Y X − [X , Y ]
The First Cartan structure equation is
1 µ
dω µ + Γµα ∧ ω α = T
2
The tensor type (1, 3) defined by
R(ω, Z, X, Y ) = ω, R( X, Y )Z
is called the curvature tensor, where
R( X, Y ) = X Y − Y X −[ X, Y]
´ 75/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-75-2048.jpg)
![If we define the curvature 2-form Ωµν by
Ωµν = dΓµν + Γµα ∧ Γαν
one can obtain the Second structure Cartan equation
1 µ
Ωµν = R ωα ∧ ωβ
2 ναβ
In the Riemannian geometry the commutator of two vector
fields is given by
[X, Y ] = X Y − Y X
and for every vector field X we have the condition Xg = 0.
´ 76/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-76-2048.jpg)
![Let us introduce the noncoordinate basis of vector fields
{e⊥ , ea }
[e⊥ , ea ] = C ⊥ e⊥ + C d⊥a ed ,
⊥a
d
[ea , eb ] = C ab ed ,
with the structure functions
1
C ⊥ = ea lnN,
⊥a C d⊥a = (N b C dab + ea N d )
N
The metric in the corresponding dual basis {θ⊥ , θa }
g = −θ⊥ ⊗ θ⊥ + γab θa ⊗ θb ,
´ 78/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-78-2048.jpg)
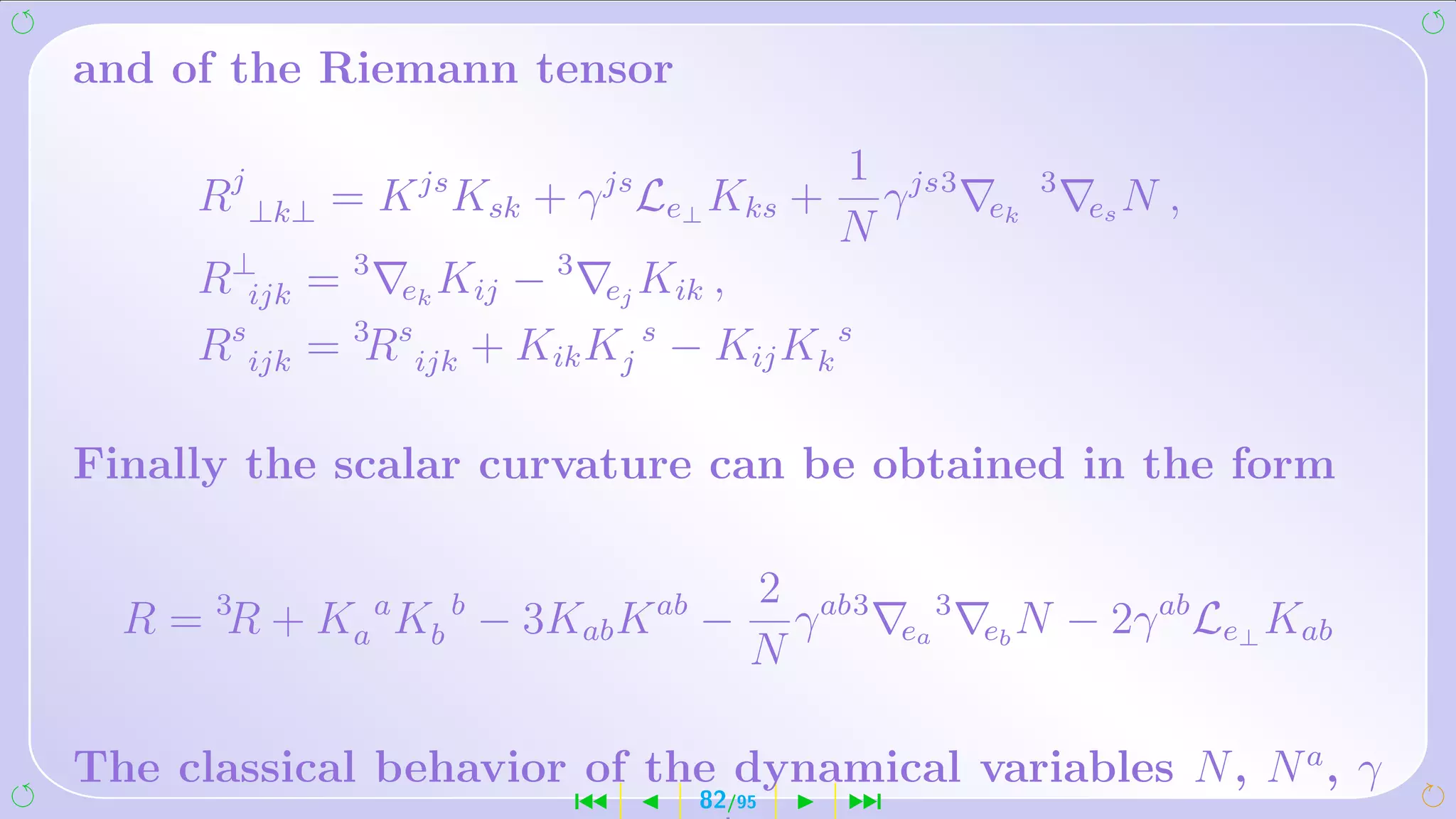
![where 3 X is the covariant derivative with respect to γ and
corresponding curvature tensor is
3
R(X, Y ) = 3 X
3
Y −3 Y
3
X − [3 X,
3
Y]
In the basis {e⊥ , ea } we find the componets of the connection
Γ⊥⊥⊥ = 0, Γ⊥⊥i = 0,
Γj ⊥⊥ = cj , Γj ⊥i = −K ji ,
Γ⊥i⊥ = ci , Γ⊥ji = −Kji ,
Γj i⊥ = −K ji + 3 j
θ , Le⊥ ei , Γkij = 3 Γkij
´ 81/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-81-2048.jpg)
![is determined by the Hilbert-Einstein action
t2
. . .
L[N, Na , γab , N , Na , γ ab ] = dt 3σN 3
R + Ka a Kb b − 3Kab K ab
t1S
t2
2 ab
− dt 3 σN γ 3
ea
3
eb N − 2γ ab Le⊥ Kab
N
t1S
√ 1
where 3σ = γ θ ∧ θ2 ∧ θ3 is the volume 3-form on Σt .
´ 83/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-83-2048.jpg)
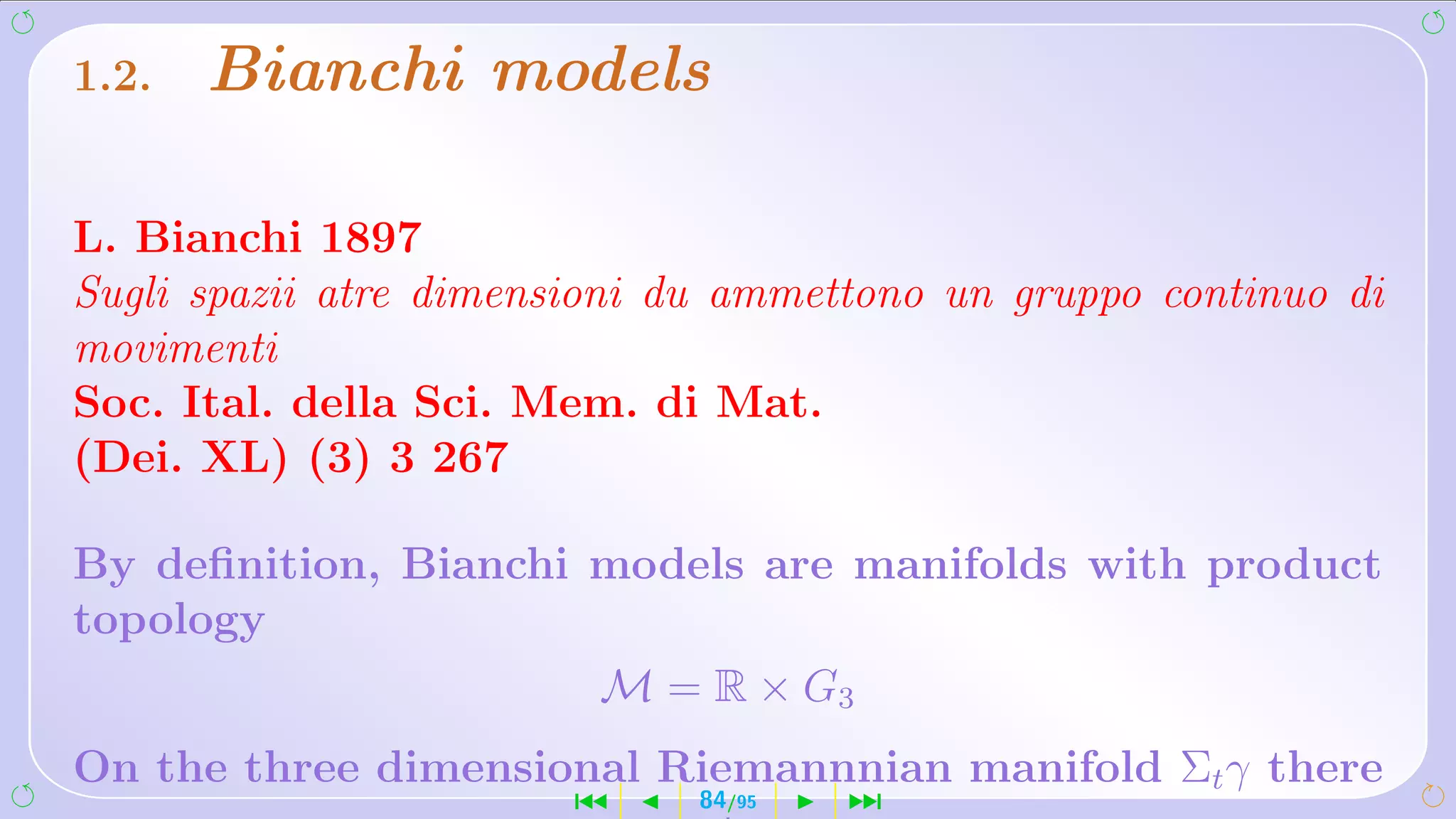
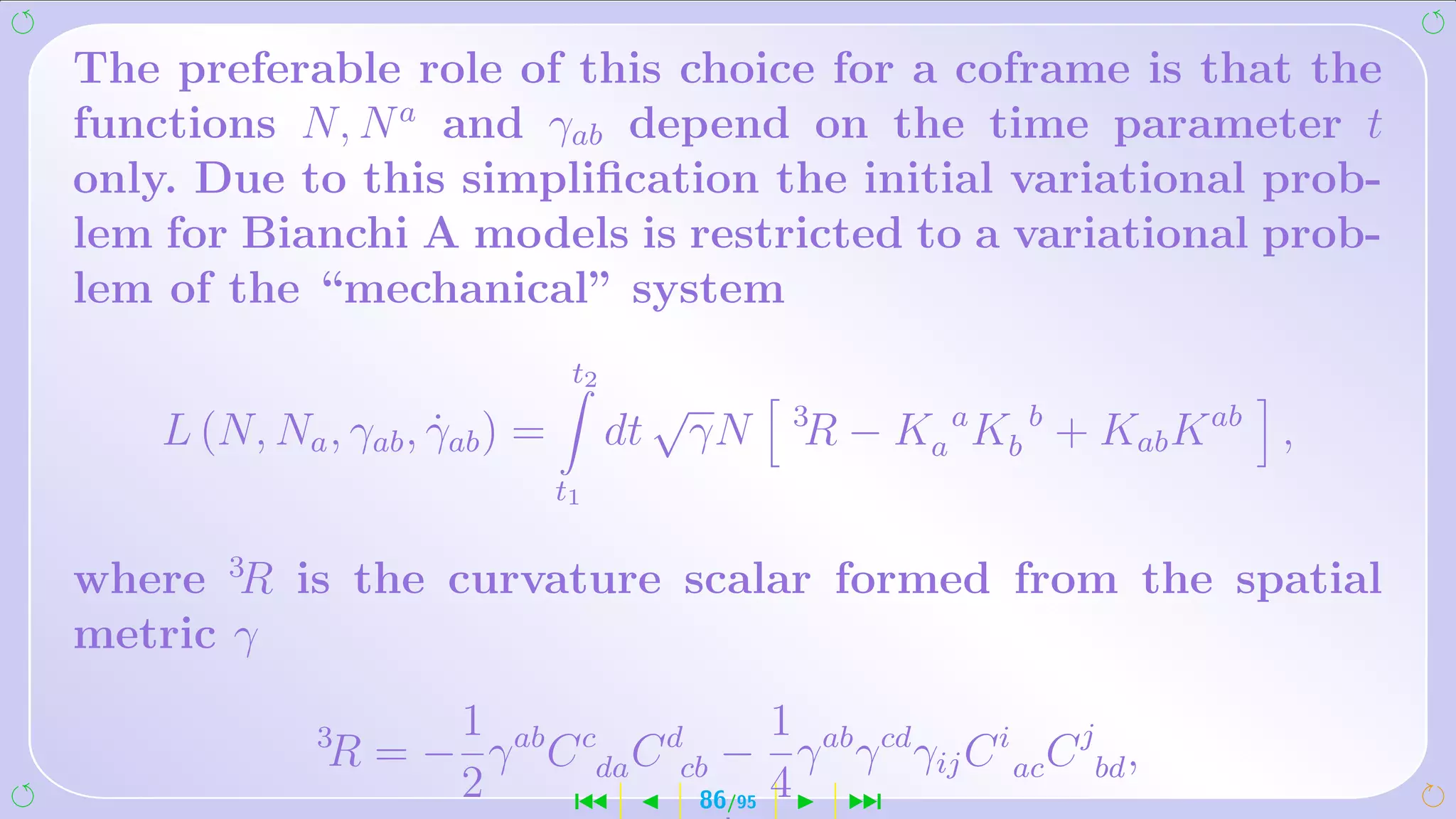
![exist left-invariant 1-forms {χa } such that
1
dχa = − C abc χb ∧ χc
2
The dual vector fields {ξa } form a basis in the Lie algebra
of the group G3
[ξa , ξb ] = C dab ξd
with structure constants C dab = 2 dχd (ea , eb ). In the invariant
basis
[e⊥ , ea ] = C d⊥a ed , [ea , eb ] = −C dab ed ,
with C d⊥a = N −1 N b C dab the metric takes the form
g = − θ⊥ ⊗ θ⊥ + γab θa ⊗ θb
´ 85/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-85-2048.jpg)
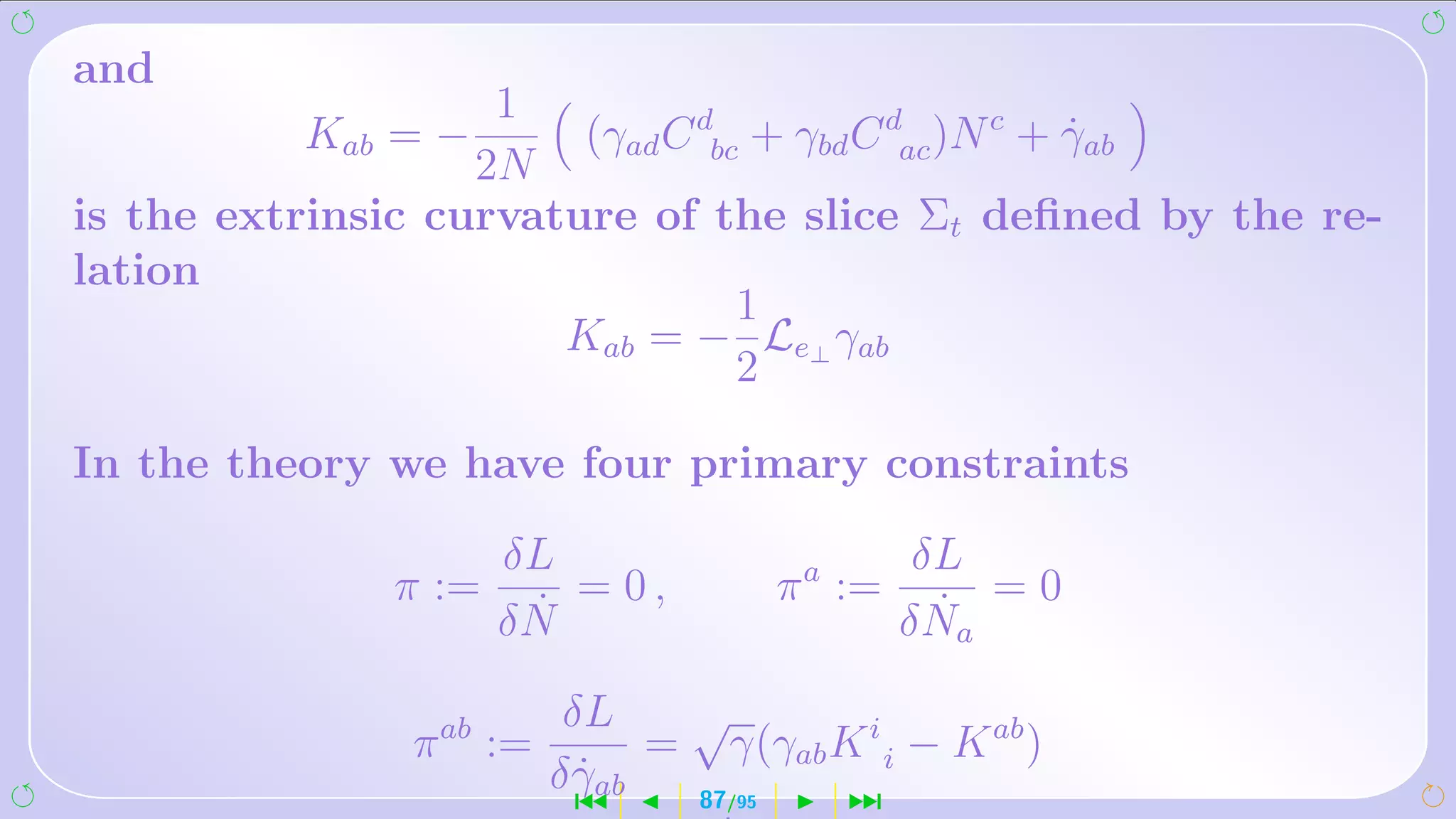
![els can be obtained in the form
t2
a ab
L[N, Na , γab , π, π , π ] = π ab dγab − HC dt
t1
where the canonical Hamiltonian is a linear combination of
the secondary constraints HC = N H + N a Ha .
´ 90/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-90-2048.jpg)
![1.3. Hamiltonian reduction of Bianchi I cosmol-
ogy
In the case of Bianchi I model the group which acts on
(Σt , γ) is T3 and the action takes the form
t2
a ab
L[N, Na , γab , π, π , π ] = π ab dγab − N Hdt .
t1
Using the decomposition for arbitrary symmetric non-singular
matrix
γ = RT (χ)e2X R(χ) ,
´ 91/95 ¹](https://image.slidesharecdn.com/dimitarmladenov-onintegrablesystemsincosmology-111227084836-phpapp02/75/D-Mladenov-On-Integrable-Systems-in-Cosmology-91-2048.jpg)

The document discusses integrable systems in cosmology, specifically focusing on dynamics on Lie groups and geodesic flow on the GL(n, R) group manifold. It outlines various models, including the Calogero-Sutherland-Moser type systems, and explores their integrable cases and symmetries. The transformations and canonical Hamiltonians for these systems are examined, detailing the implications for geodesic flow and algebra of motion integrals.