
![Why is Verification and Validation Important
Automotive Embedded
Software Verification
Recent Auto Recalls due to Software Failure and Validation
Strategies
Toyota Prius – HEV Presentation Objective
Year 2005 Presentation Outline
Recalled 160,000 vehicles worldwide Model Based Control
Software error stalls the gasoline engine Development
from operating [NHTSA AID PE05029] Verification and
Validation
Daimler Chrysler – Jeep Commander, Static Verification &
Validation
Wrangler, Grand Cherokee
Dynamic Verification &
Year 2007
Validation
Recalled 296,550 vehicles
Model based
Software error in ABS ECU allows Verification & Validation
momentary delay in braking during some
maneuvers which can cause a crash without
any warning [NHTSA ID 07V434000]
$ Between 2005-2007 approximately 700,000 vehicles of
different makes are recalled due to Software errors
15](https://image.slidesharecdn.com/automotivevandv-090917041146-phpapp02/75/ECU-Verification-Validation-15-2048.jpg)
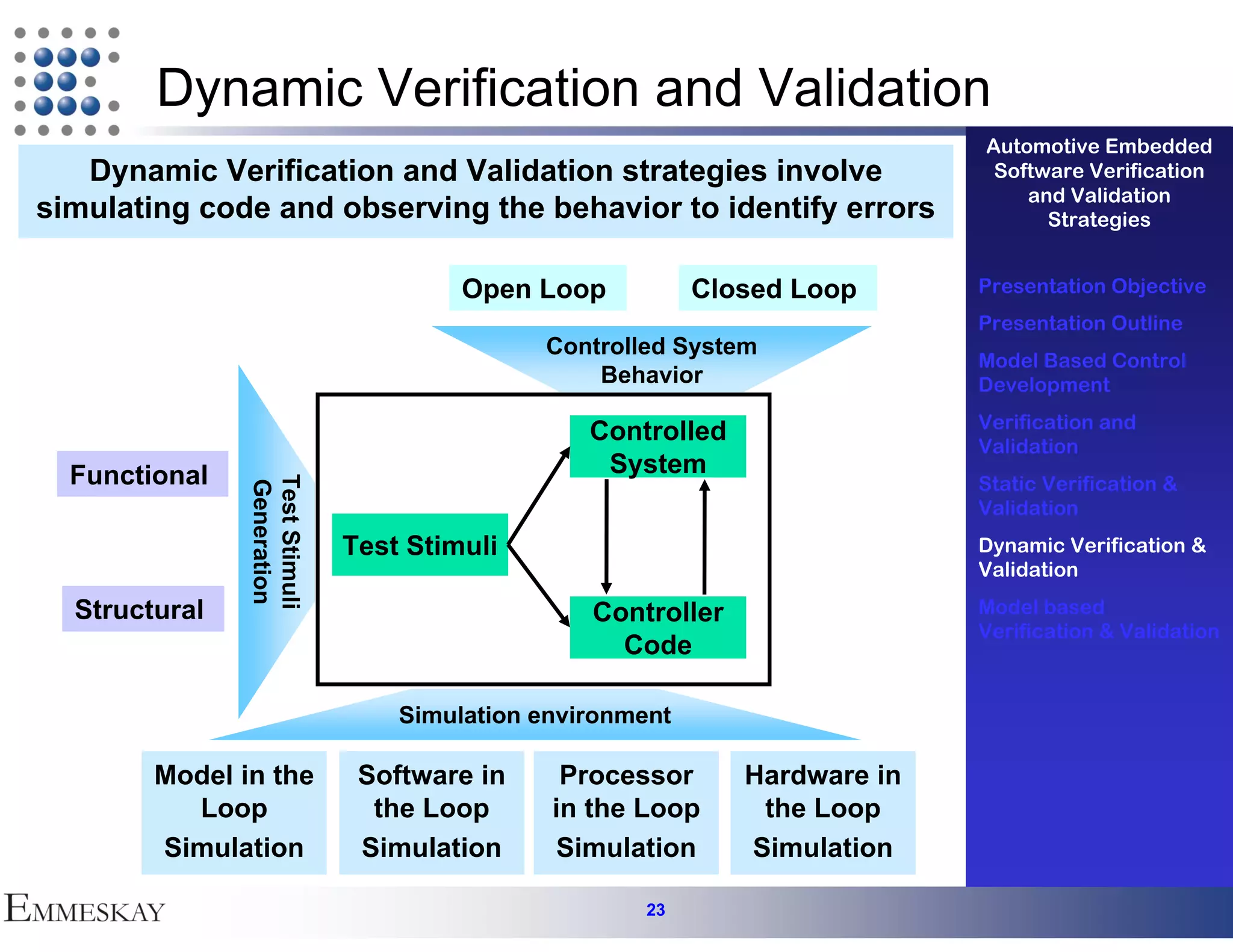
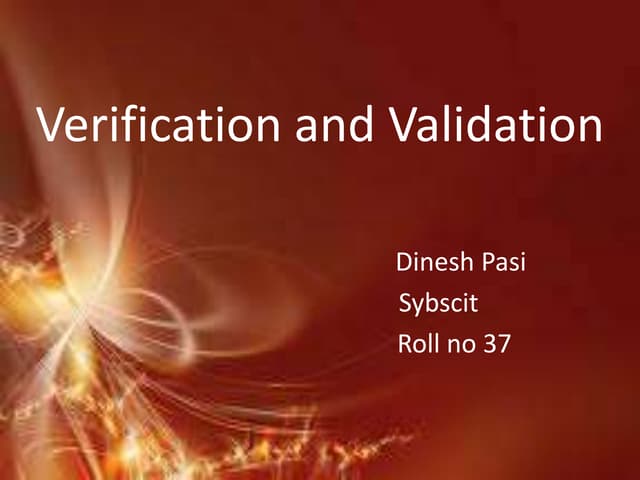
![Dynamic Verification and Validation
Automotive Embedded
Tools which support Dynamic Verification & Validation Software Verification
and Validation
Matlab/Simulink Strategies
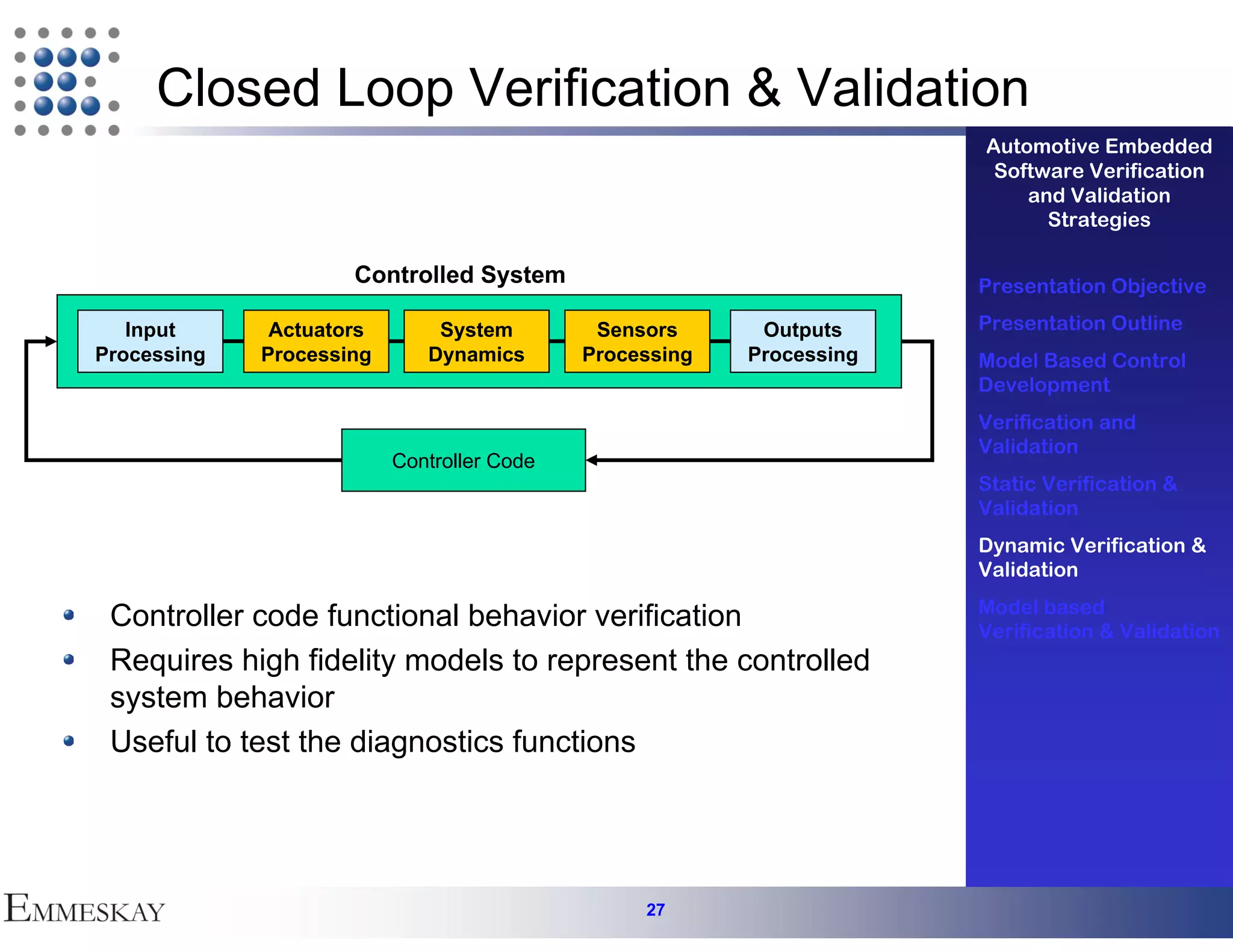
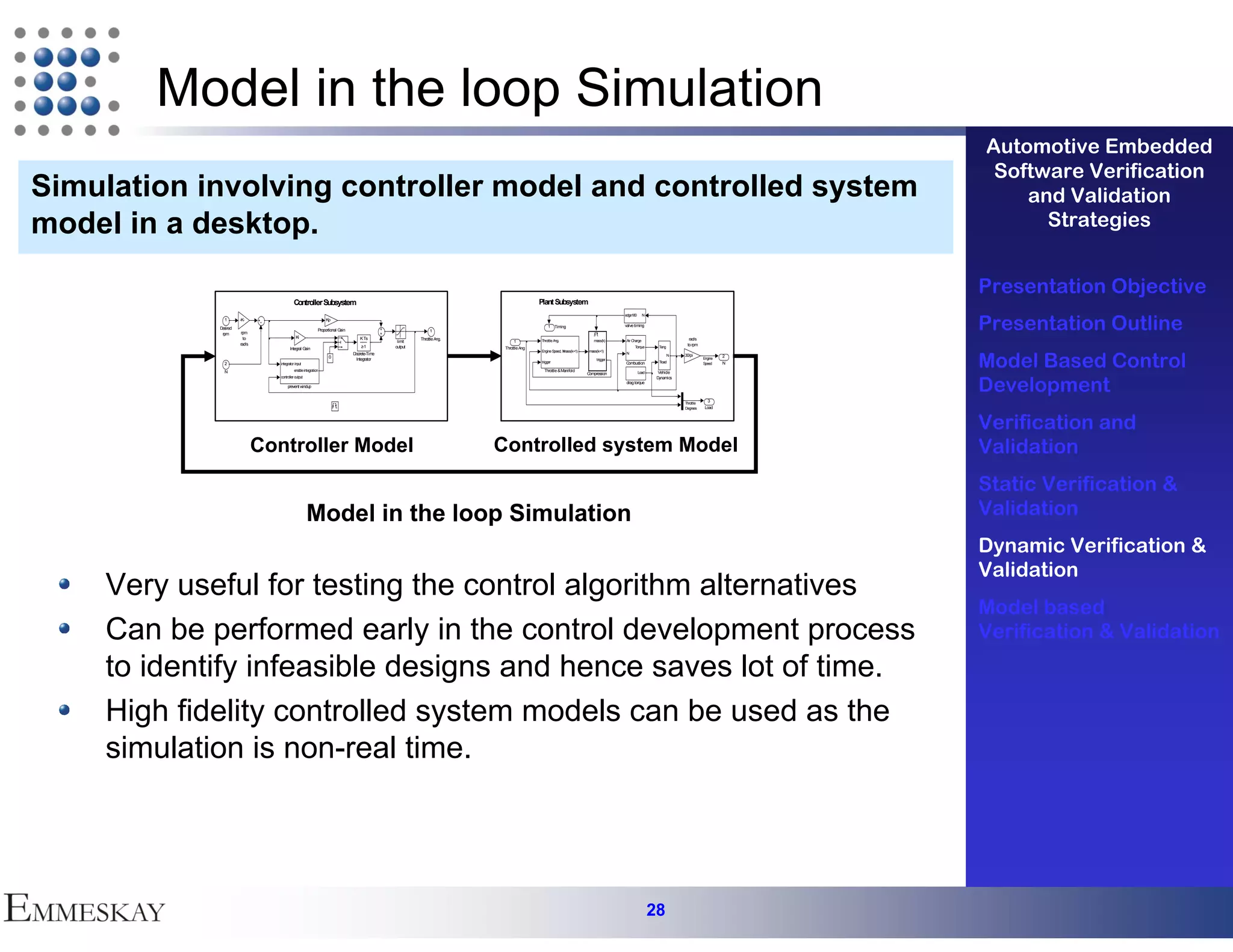
Model in the loop Simulation
Ascet
Matlab/Simulink Presentation Objective
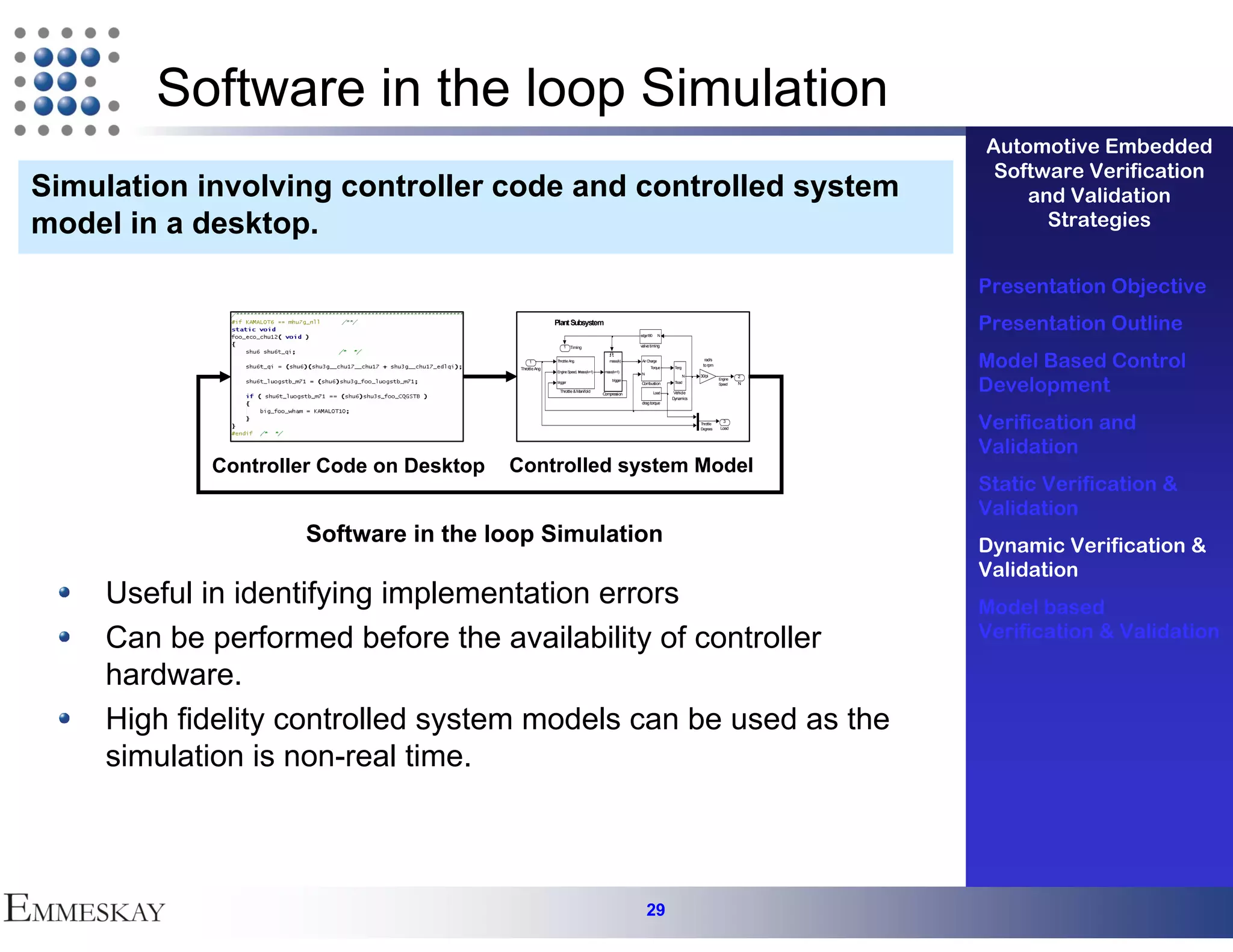
Software in the loop Simulation
Ascet/Intecrio Presentation Outline
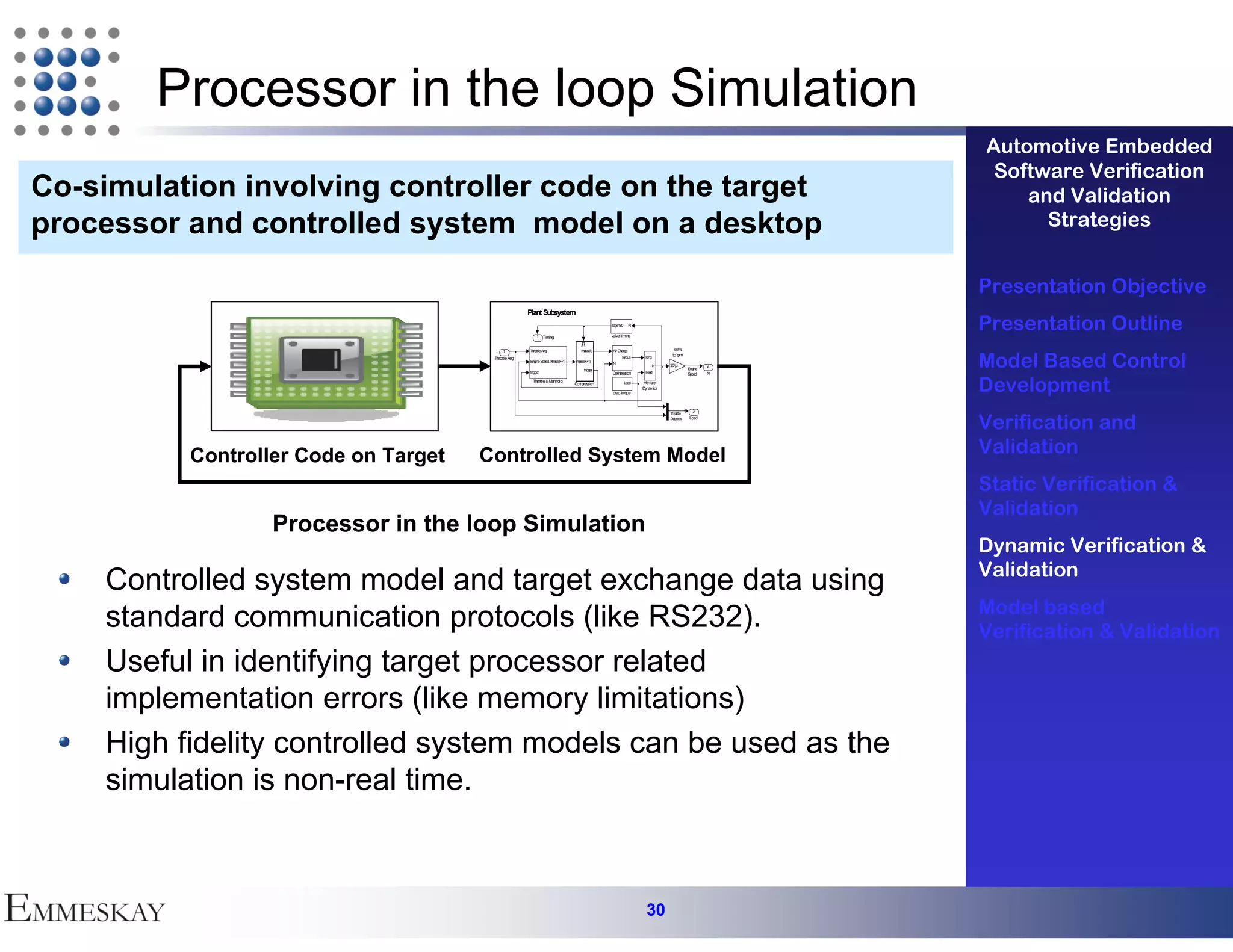
Processor in the loop Simulation Matlab/Simulink
Model Based Control
Matlab/Simulink Development
Ascet/Intecrio
Hardware in the loop Simulation Verification and
RT-Lab Validation
RTI
Static Verification &
Tools for Automatic Test Vector Generation from Validation
Simulink M odel Dynamic Verification &
Validation
BEACON Tester ADI
Model based
Verification & Validation
MATT [Matlab Automated
Testing Tool] University of Montana
Reactis Reactive Systems
STB [Safety Test Builder] TNI Software
T-VEC Tester for Simulink T-VEC
Simulink Design Verifier MathWorks
33](https://image.slidesharecdn.com/automotivevandv-090917041146-phpapp02/75/ECU-Verification-Validation-33-2048.jpg)

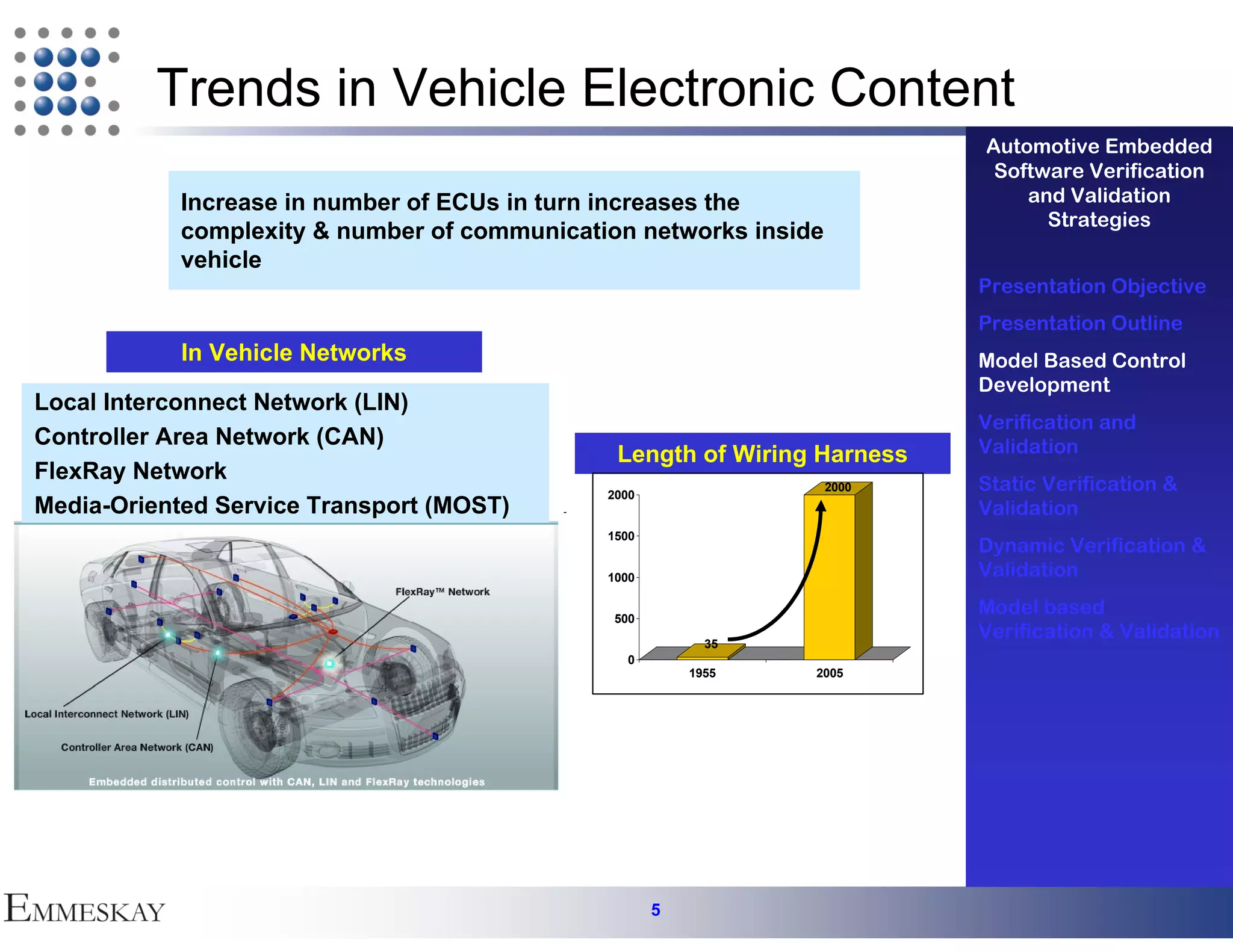
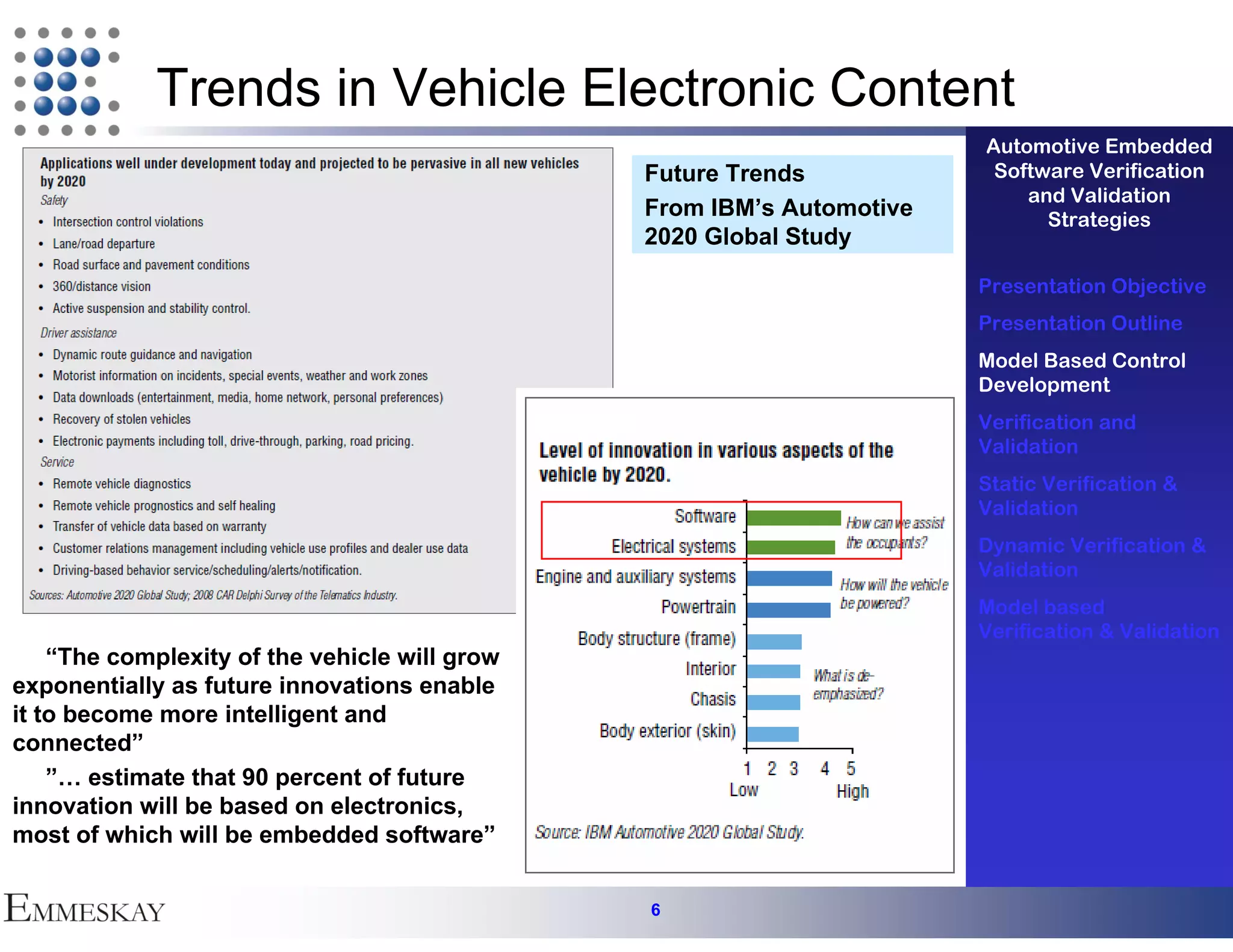
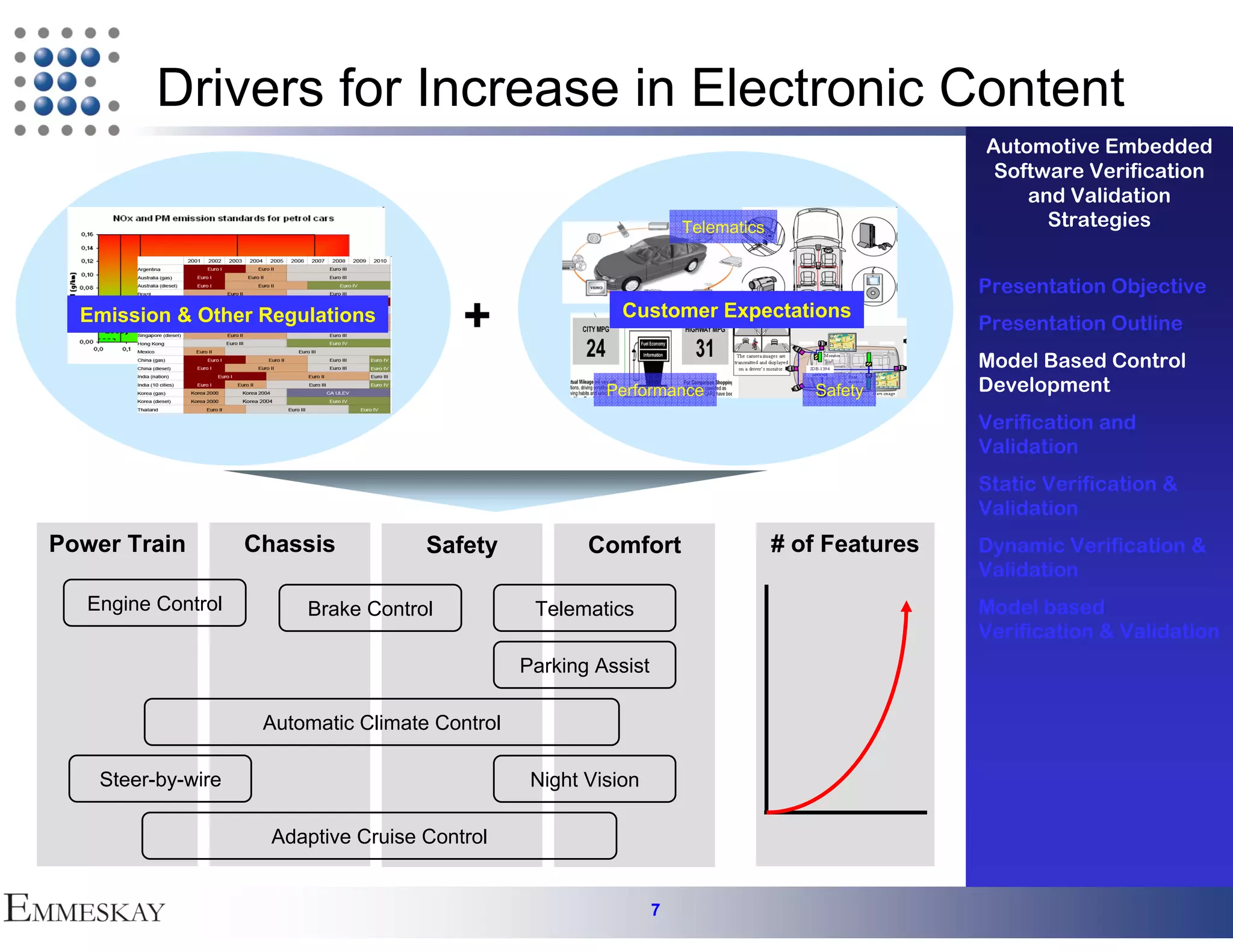
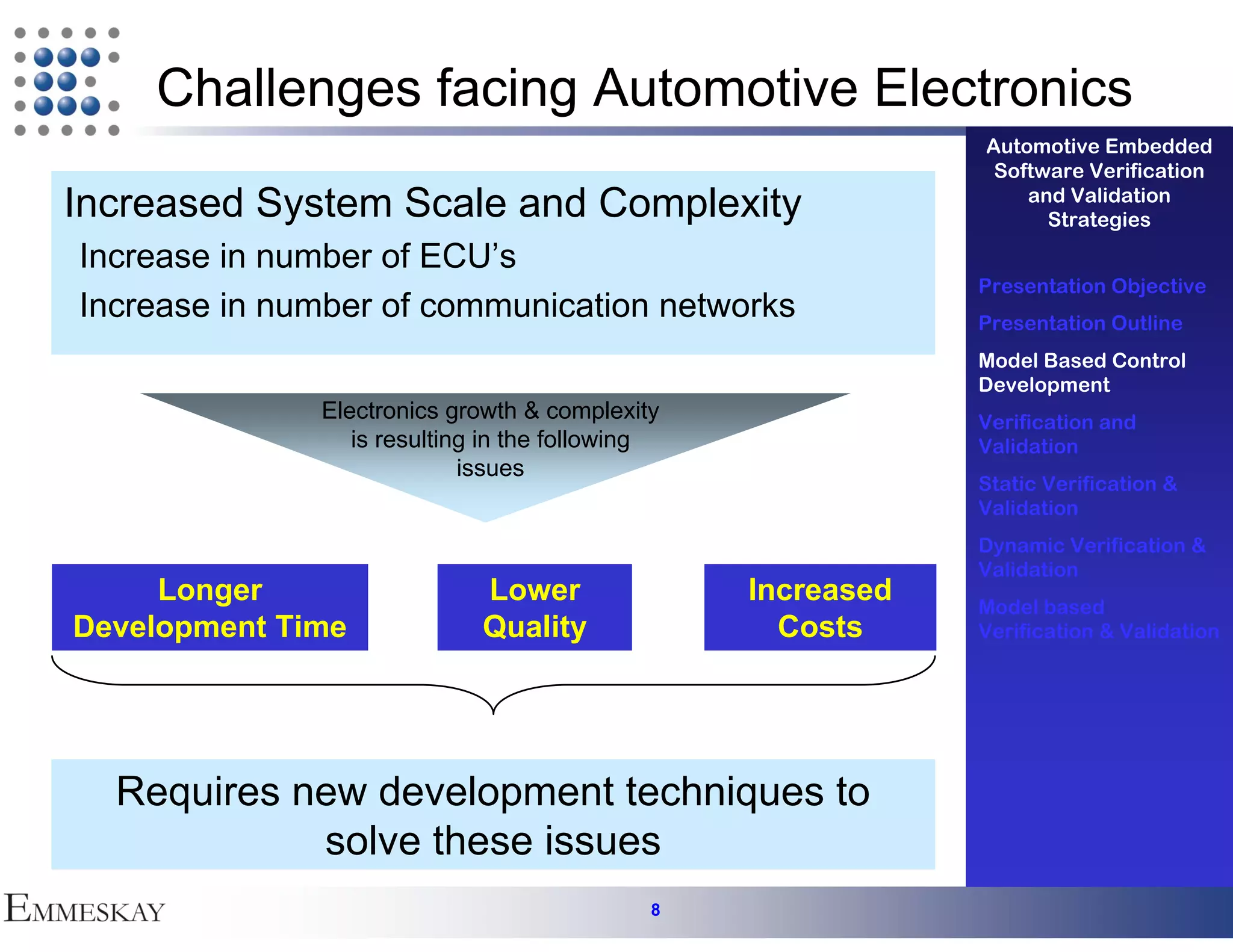
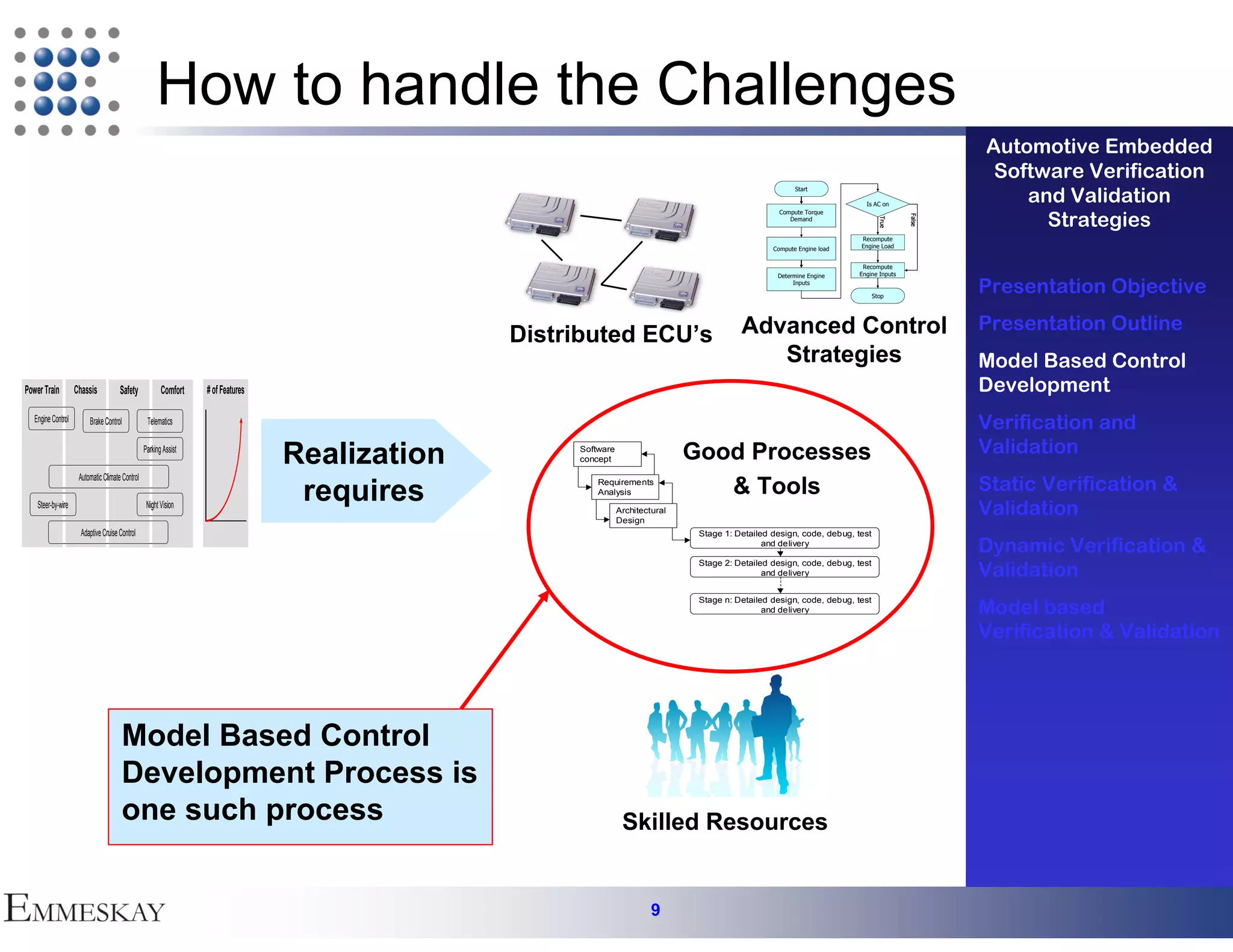
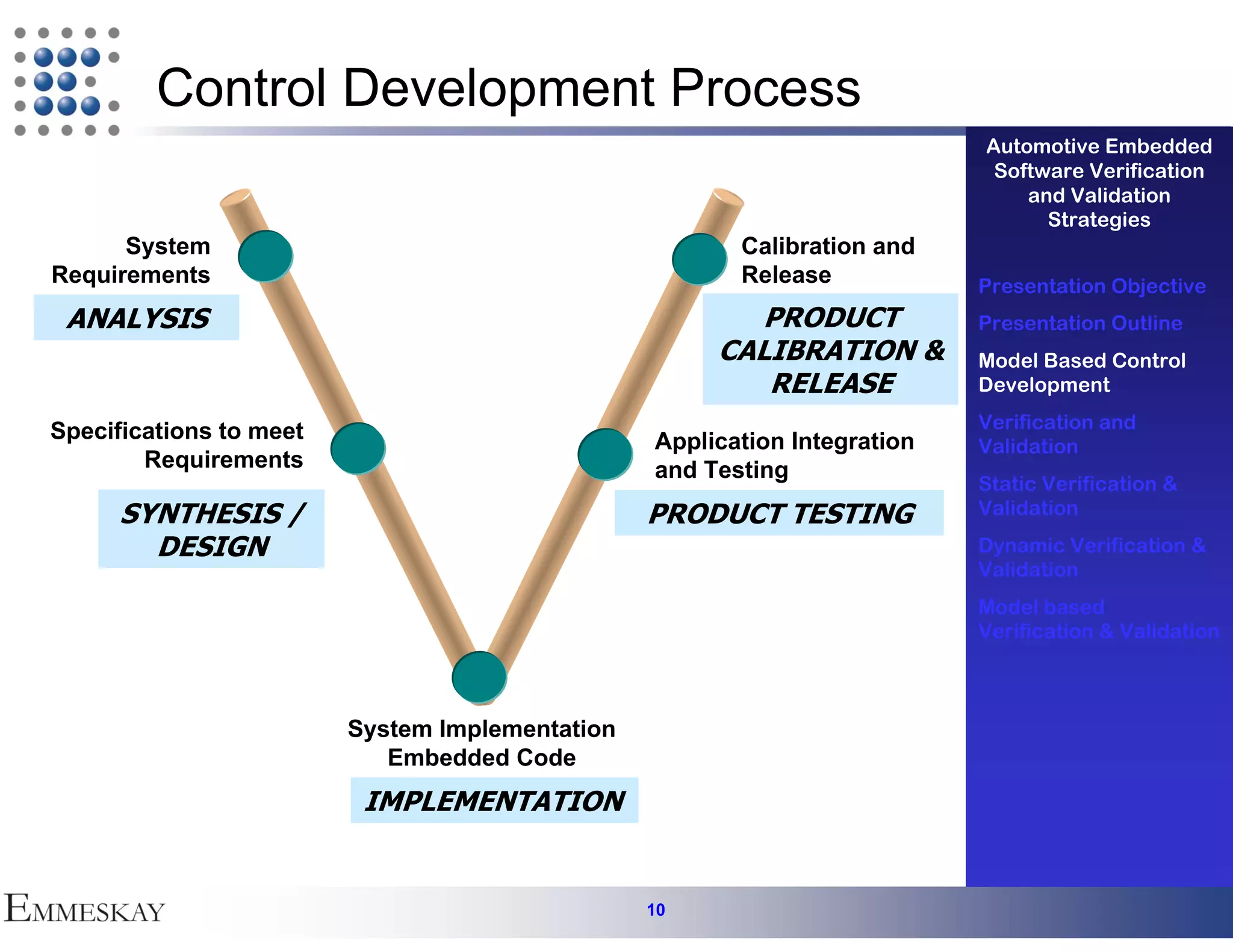
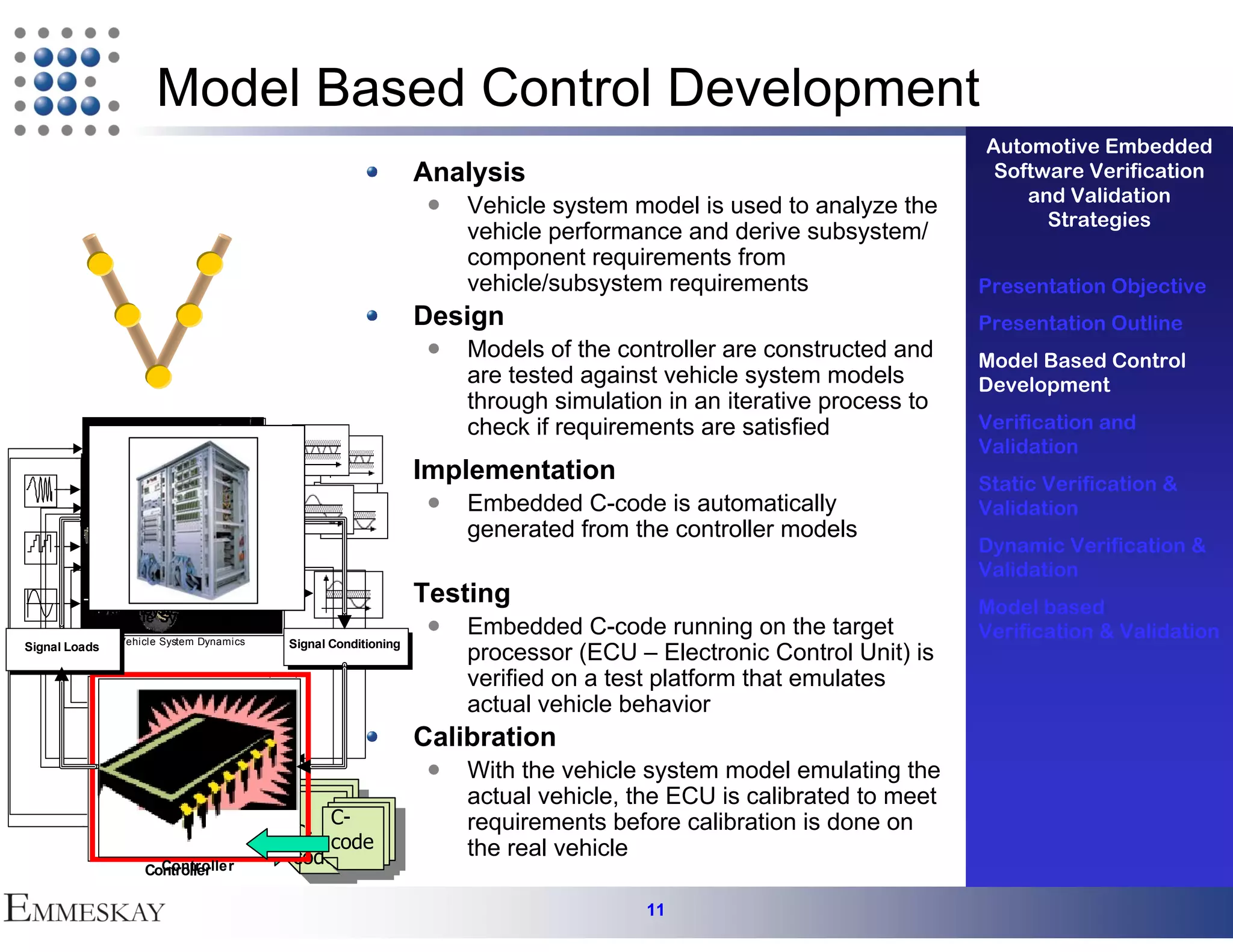
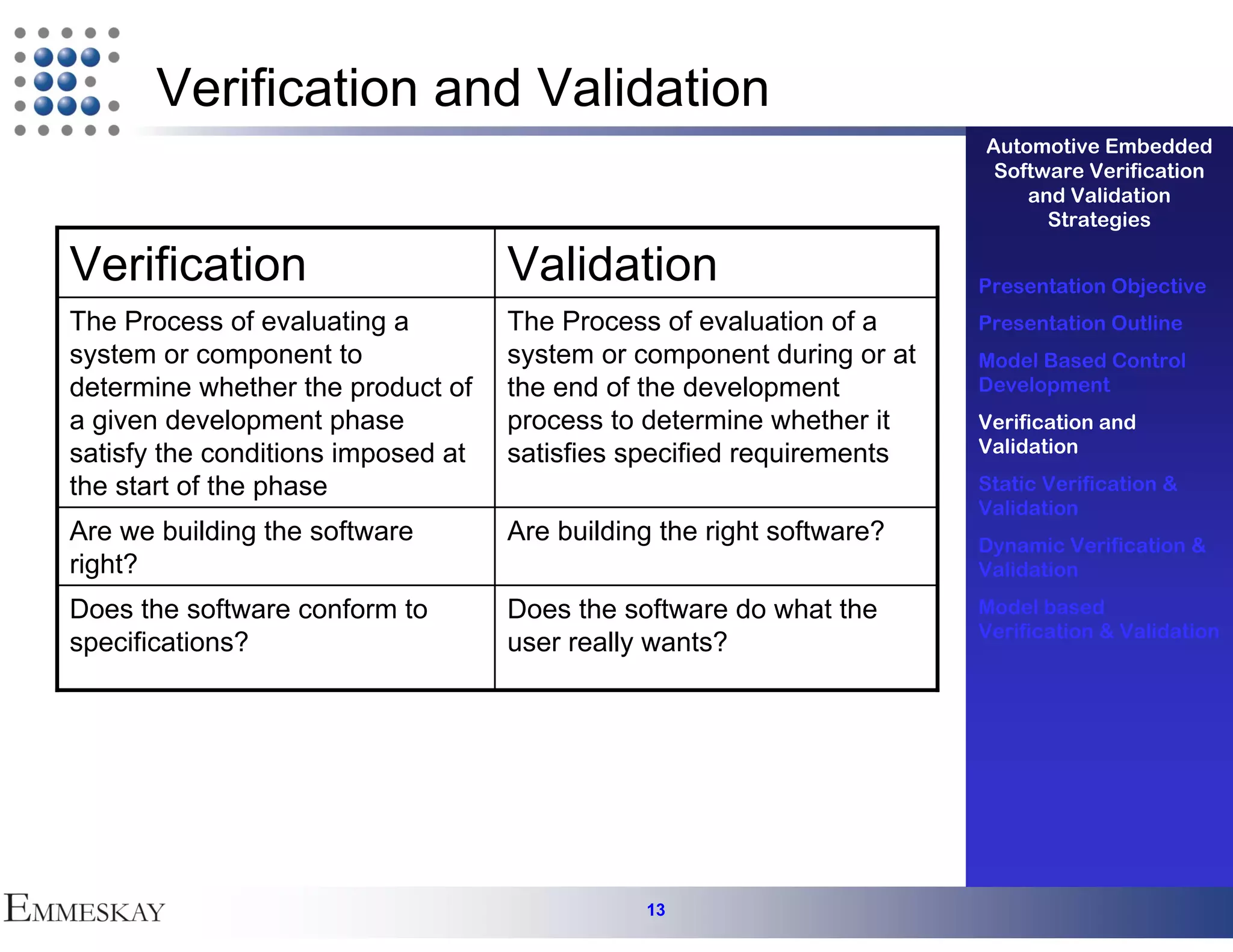
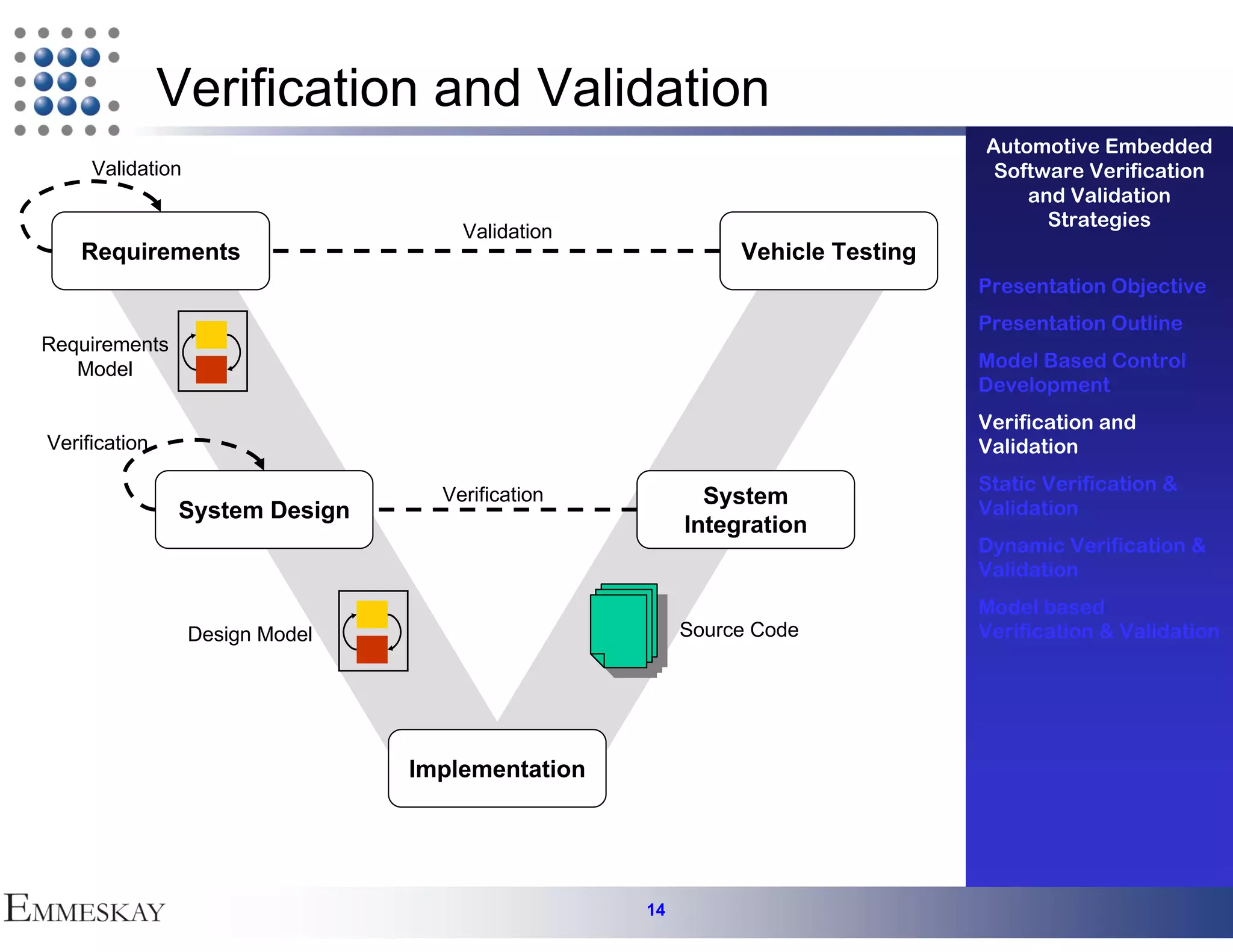
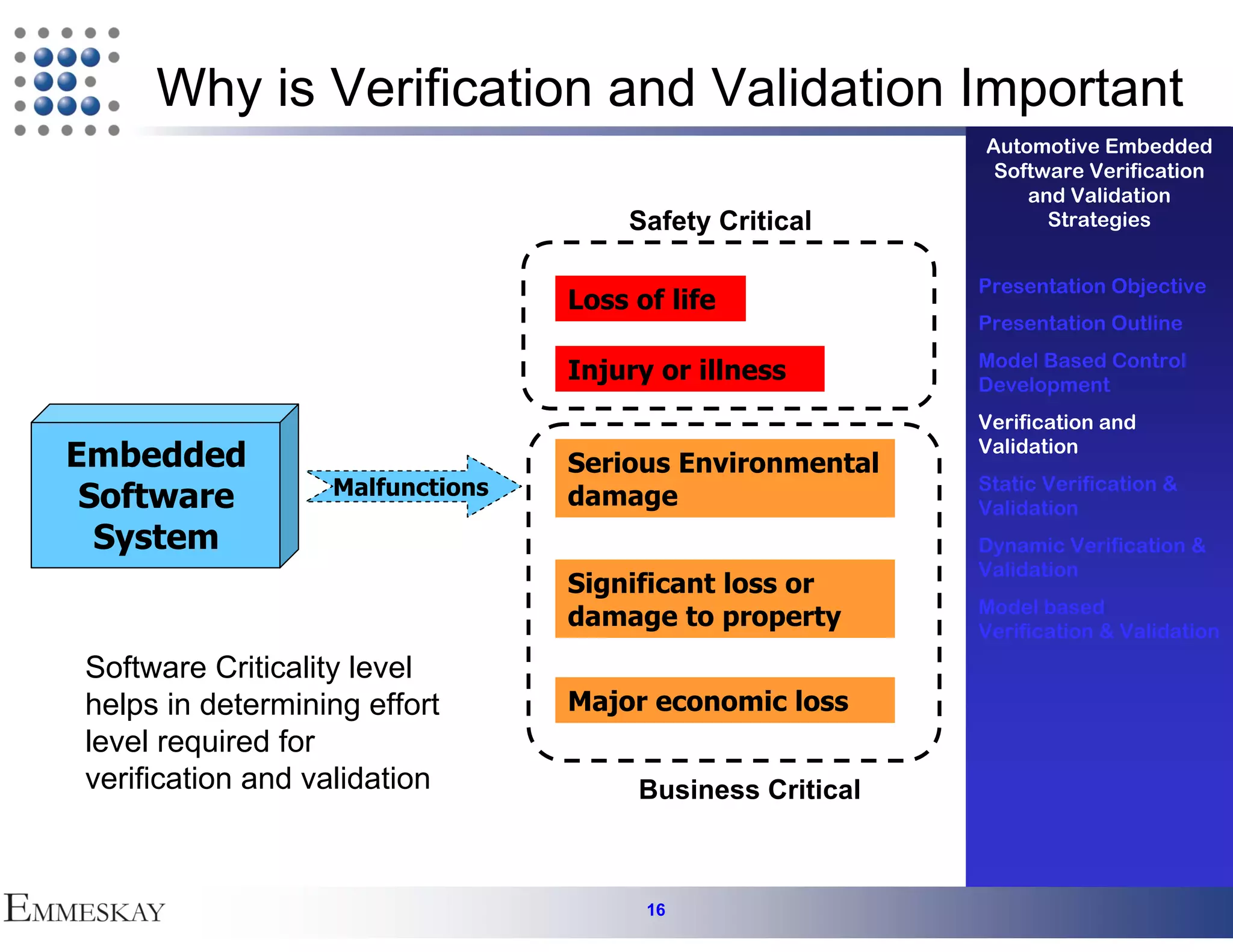
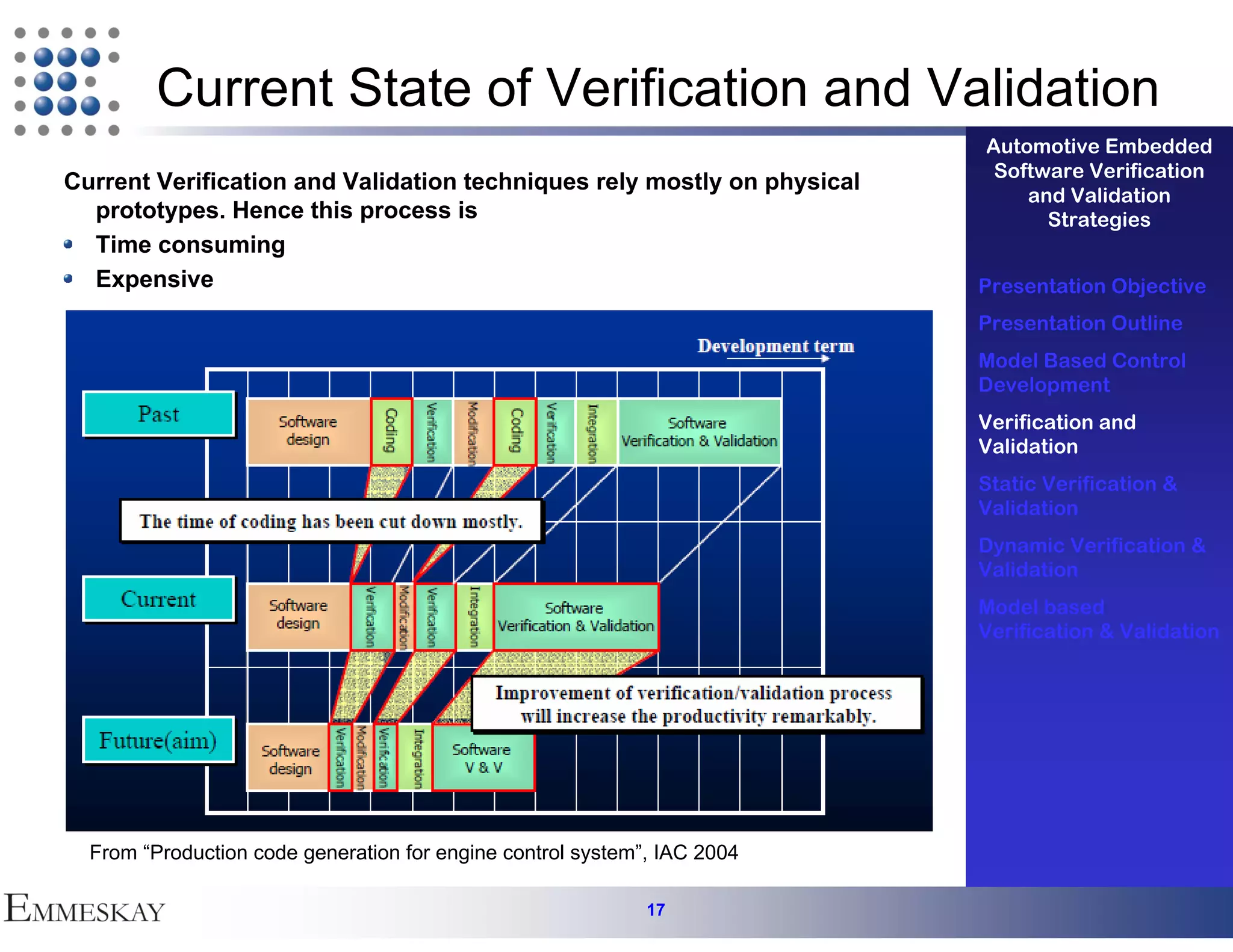
The document provides an extensive overview of automotive embedded software verification and validation strategies, emphasizing the importance of model-based control development. It discusses various techniques including static and dynamic verification, trends in vehicle electronics, and the complexities arising from the increased use of electronic control units (ECUs). Additionally, it highlights the significance of ensuring software reliability to avoid failures that could lead to recalls and safety issues.























































![1. SIH2025-IDEA-Presentation-Format[1].pptx](https://cdn.slidesharecdn.com/ss_thumbnails/1-251204091914-b1bb69d5-thumbnail.jpg?width=640&height=640&fit=bounds)









