Downloaded 322 times
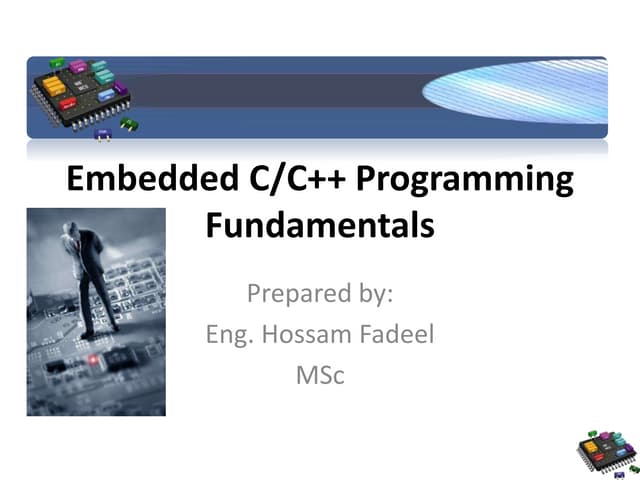
![Reentrant Functions
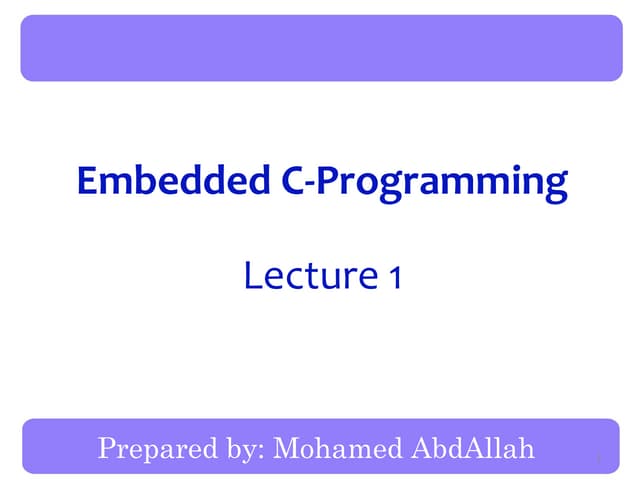
Function shared by several processes
Reentrant
Function
under
execution
SAME TIME
Another
FunctionINTERRUPTS
Reentrant
Function
Starts Again
int calc (char I, int b) reentrant
{
int x;
x=table [ i ];
return (x * b);
}
Reentrant
function known
as Recursive
function and
c a l l e d
simultaneously
by two or more
functions
Used in real-time applications where
interrupt code & non-interrupt code
must share a function.](https://image.slidesharecdn.com/embeddedc-130728065344-phpapp01/75/Embedded-_c_-23-2048.jpg)

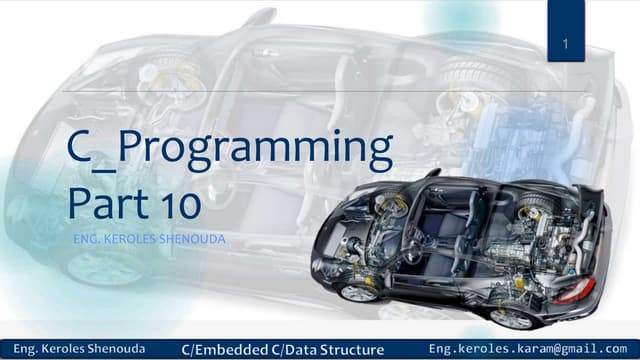
![Creating Executable Programs, temporary
files,Include files and Library files.
• The C source code is compiled using c51 compiler by
invoking C51.exe.
• The command line is
C51 source files [directives….]
where
Source files: is the name of the source program to be
compiled.
Directive: are directives to the compiler to control the
function of the compiler](https://image.slidesharecdn.com/embeddedc-130728065344-phpapp01/75/Embedded-_c_-31-2048.jpg)
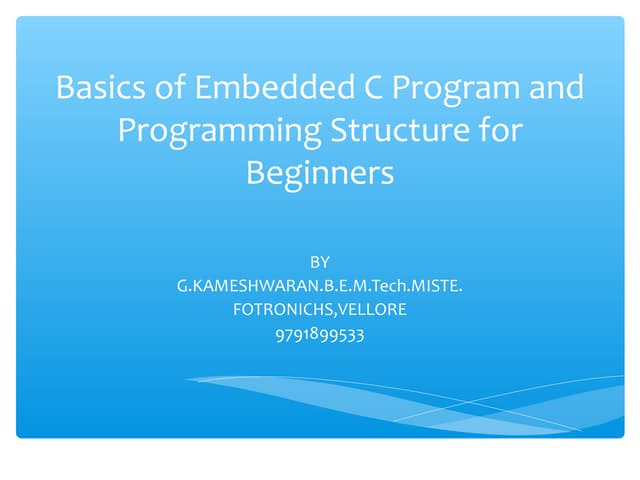
![•Use All the SFR’s in capital letters only.
•Reduce the warnings in the program.
•Make use of MACRO definitions in the program.
•Always define the variables in the code memory by using the
keyword code in declaration.
•Eg unsigned int code a[] = { };
•Always define as unsigned type of declaration.
•Make use of sbit definition for single bit declaration.
•Eg sbit rs = P3^6;
•Since these are not floating point co-processor, no decimal
values can be given as input to them.](https://image.slidesharecdn.com/embeddedc-130728065344-phpapp01/75/Embedded-_c_-56-2048.jpg)

The document discusses various topics related to embedded C programming including differences between operating systems and embedded systems, advantages of using C for embedded programming, differences between conventional C and embedded C, and tools used for embedded C development. Key points include: Embedded systems are closely tied to hardware and have limited memory and registers compared to operating systems. C is commonly used for embedded programming due to its familiarity, reliability, and portability. Embedded C requires a cross compiler to generate object code for the target microcontroller.
Introduction to Embedded C with topics covering Embedded vs. Conventional C, advantages of embedded systems.
Differences between Operating Systems and Embedded Systems; focus on hardware ties, memory limitations, and design considerations.
The use of high-level languages like C due to their productivity and reliability; comparison of Assembly vs. C language.
Comparative analysis of Conventional C and Embedded C highlighting compiler differences and suitability for embedded systems.
Memory management concepts in C vs. Embedded C, and reasons for choosing C for microcontrollers.
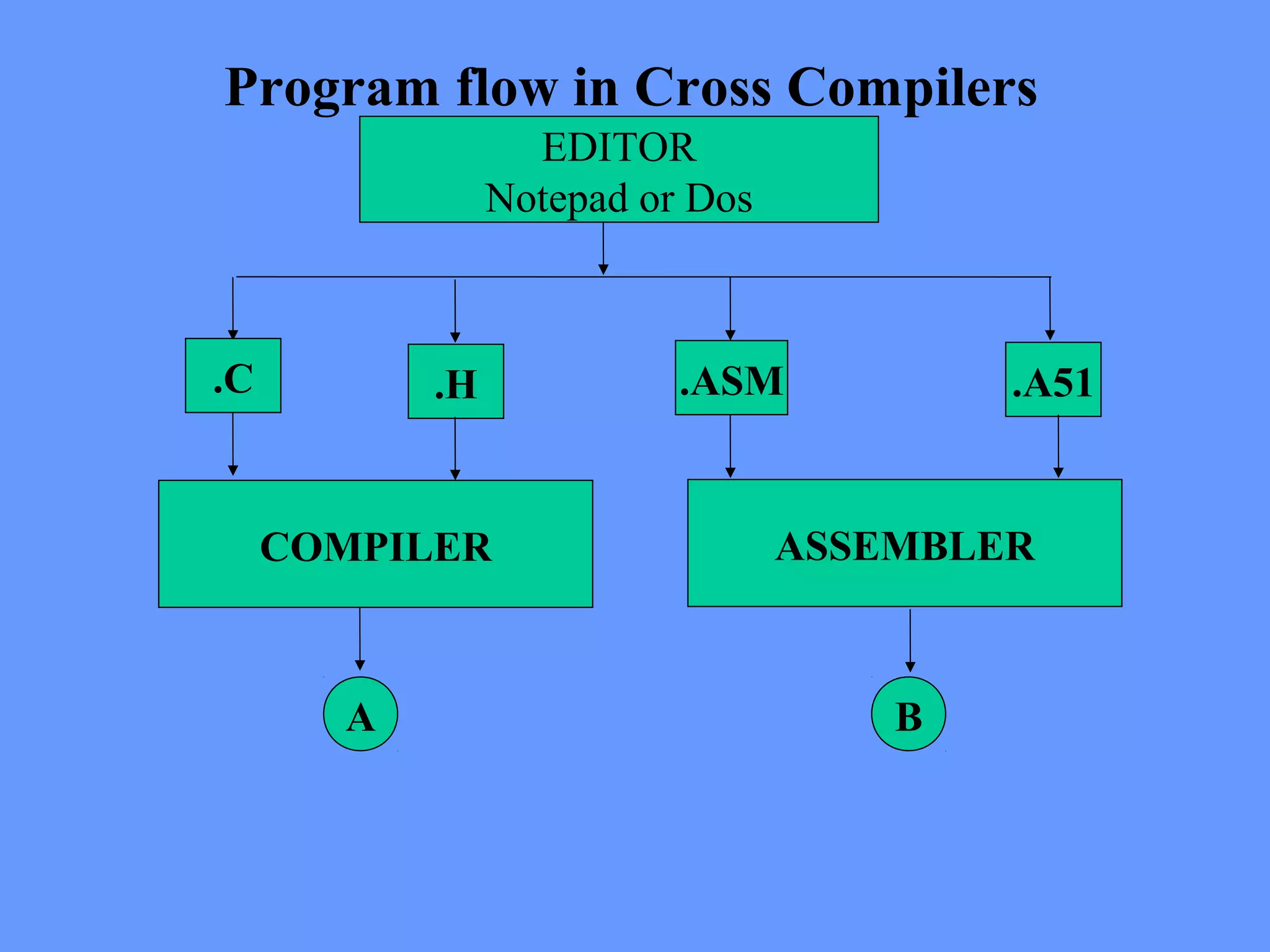
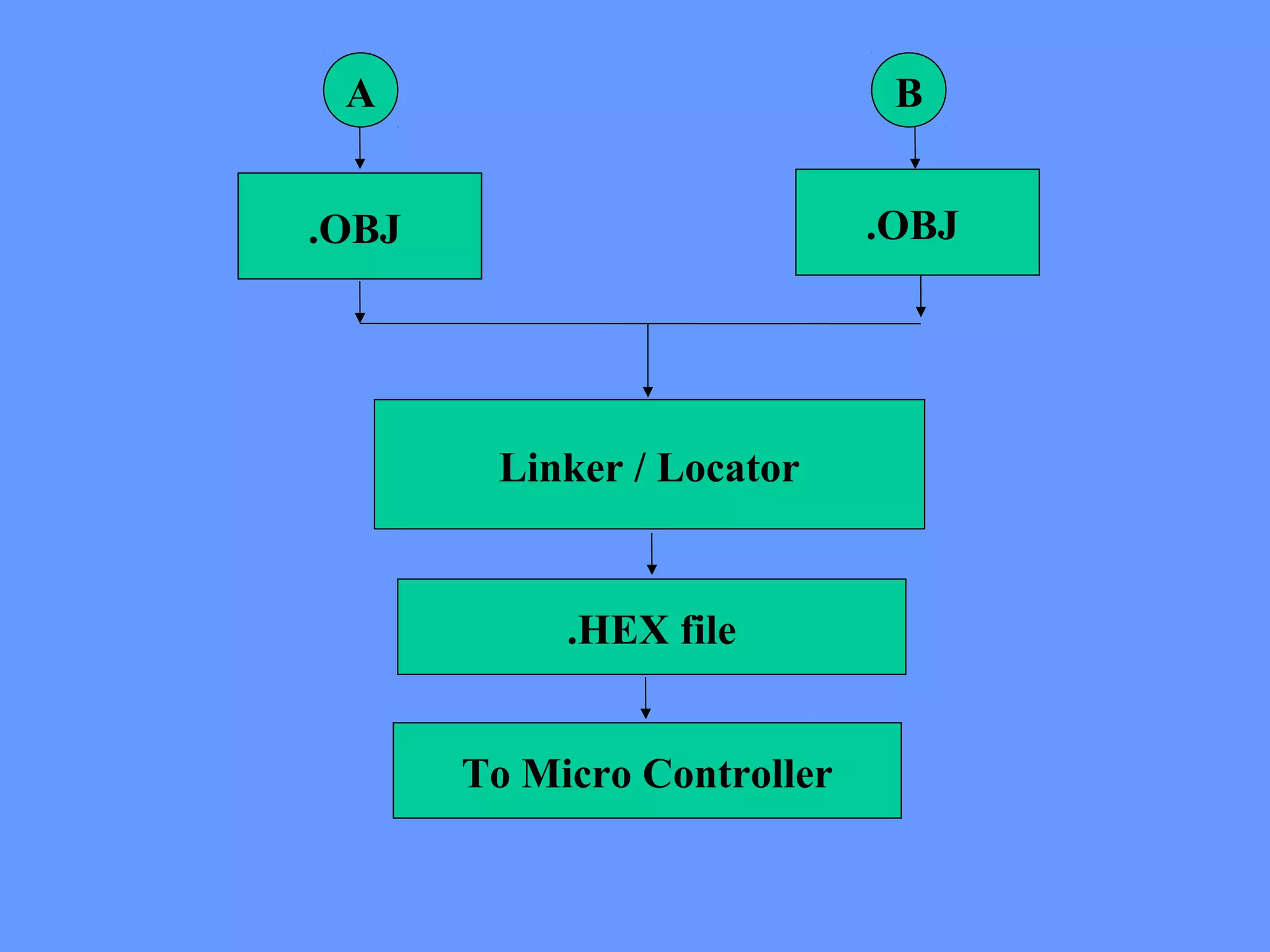
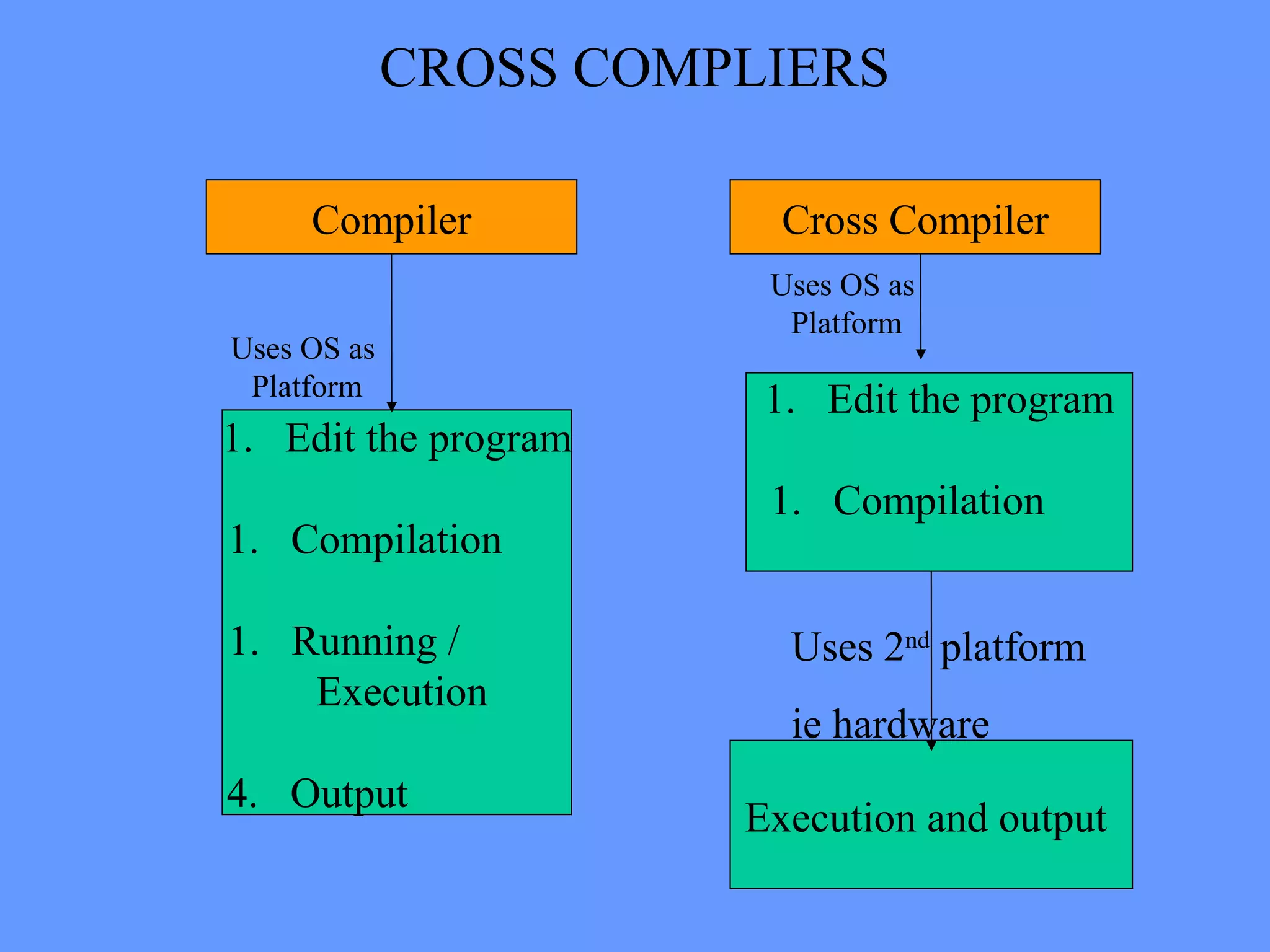
Outline of program flow in cross-compilers and the process from input editor to compiling for the micro-controller.
Introduction to bit-level programming in Embedded C, examples, and limitations associated with bit pointer.
Explanation of startup code's functions prior to main(), and its significance for high-level language execution.
Challenges in embedded software development, reentrancy, static and volatile keywords implications.
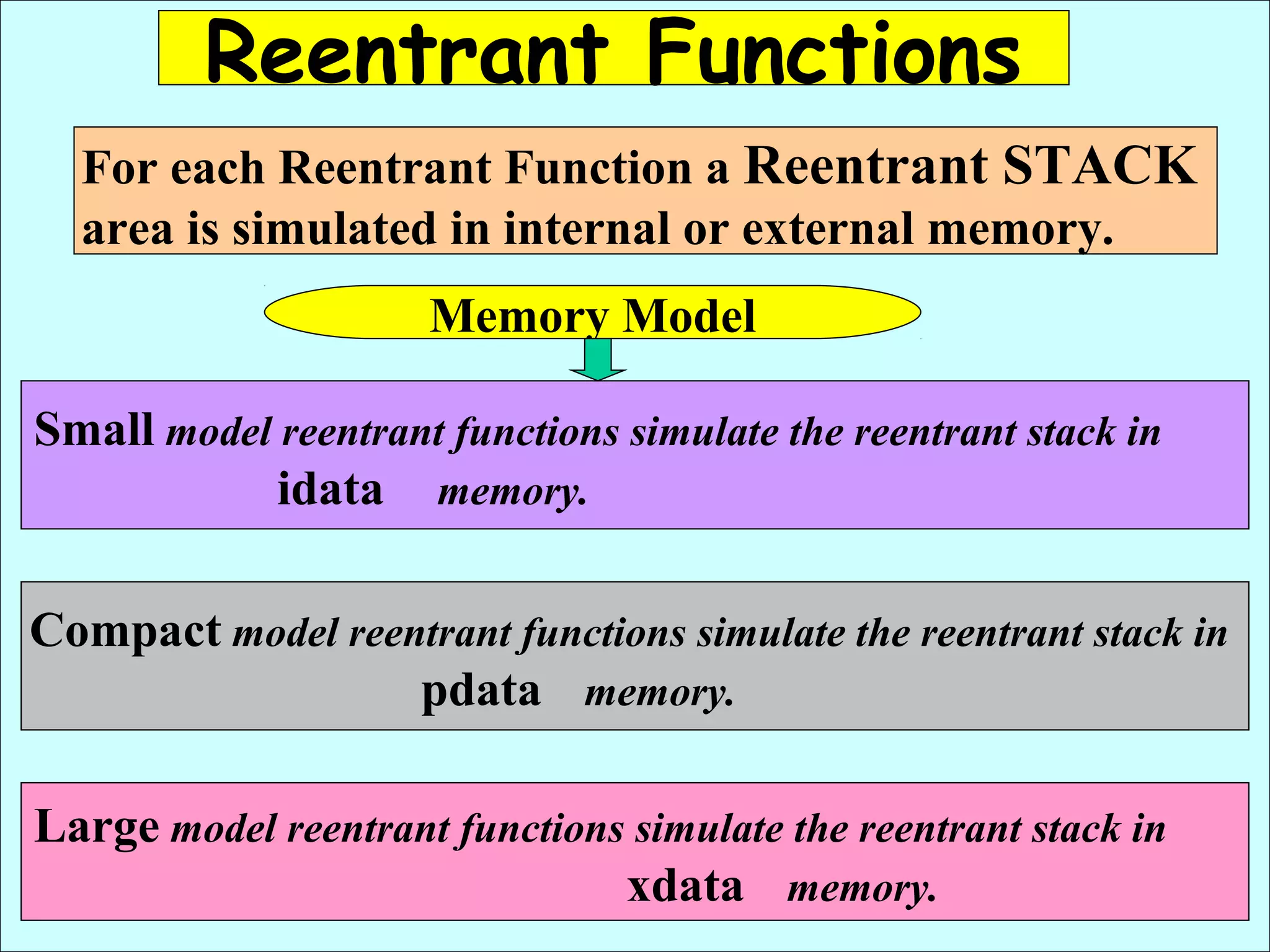
Explanation and examples of reentrant functions, their memory management, and significance in real-time applications.
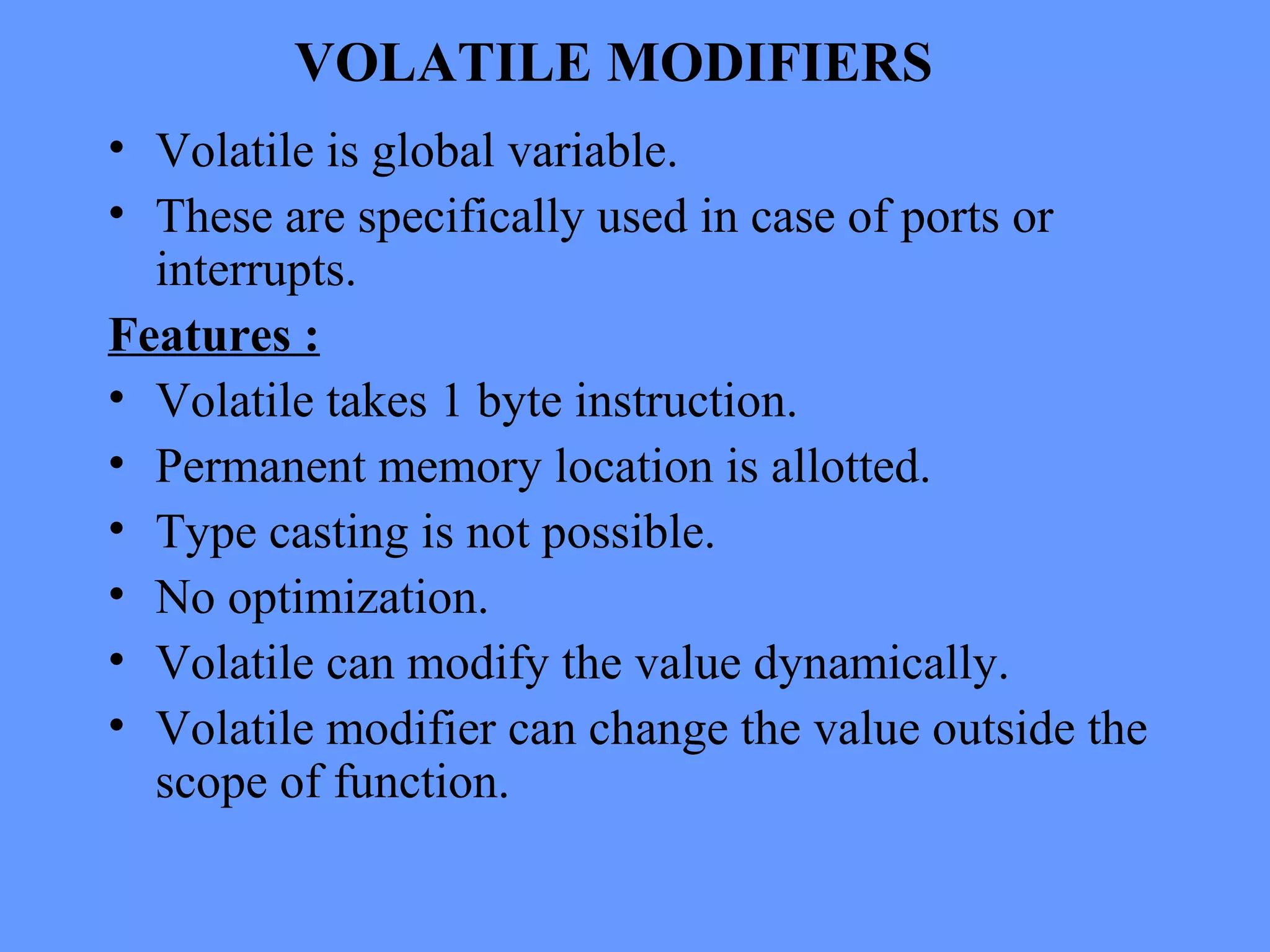
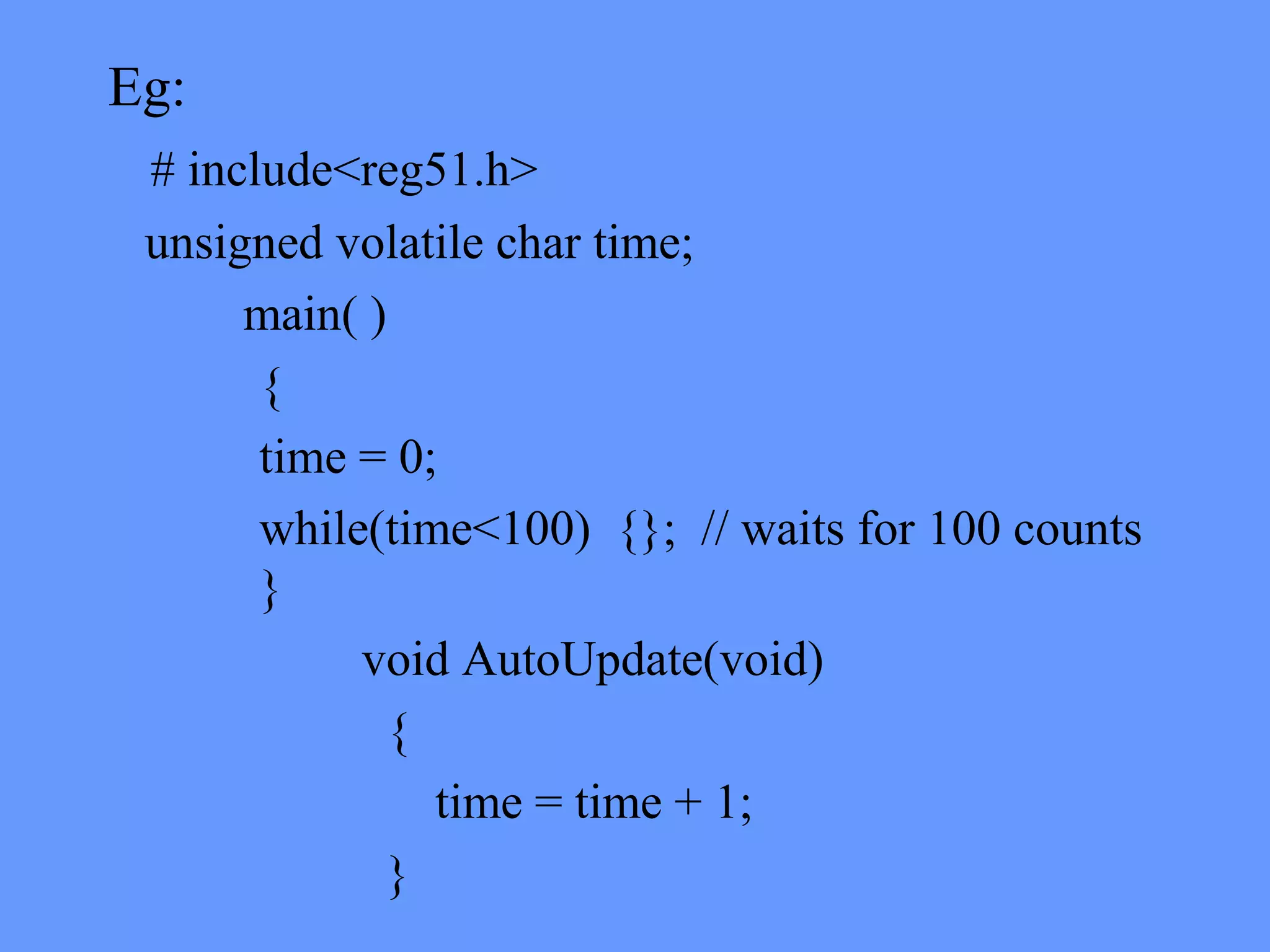
The role of volatile modifiers in Embedded programming, their features, and impact on optimization.
Declaration of environment variables in Embedded C, and distinction between automatic and static variables.
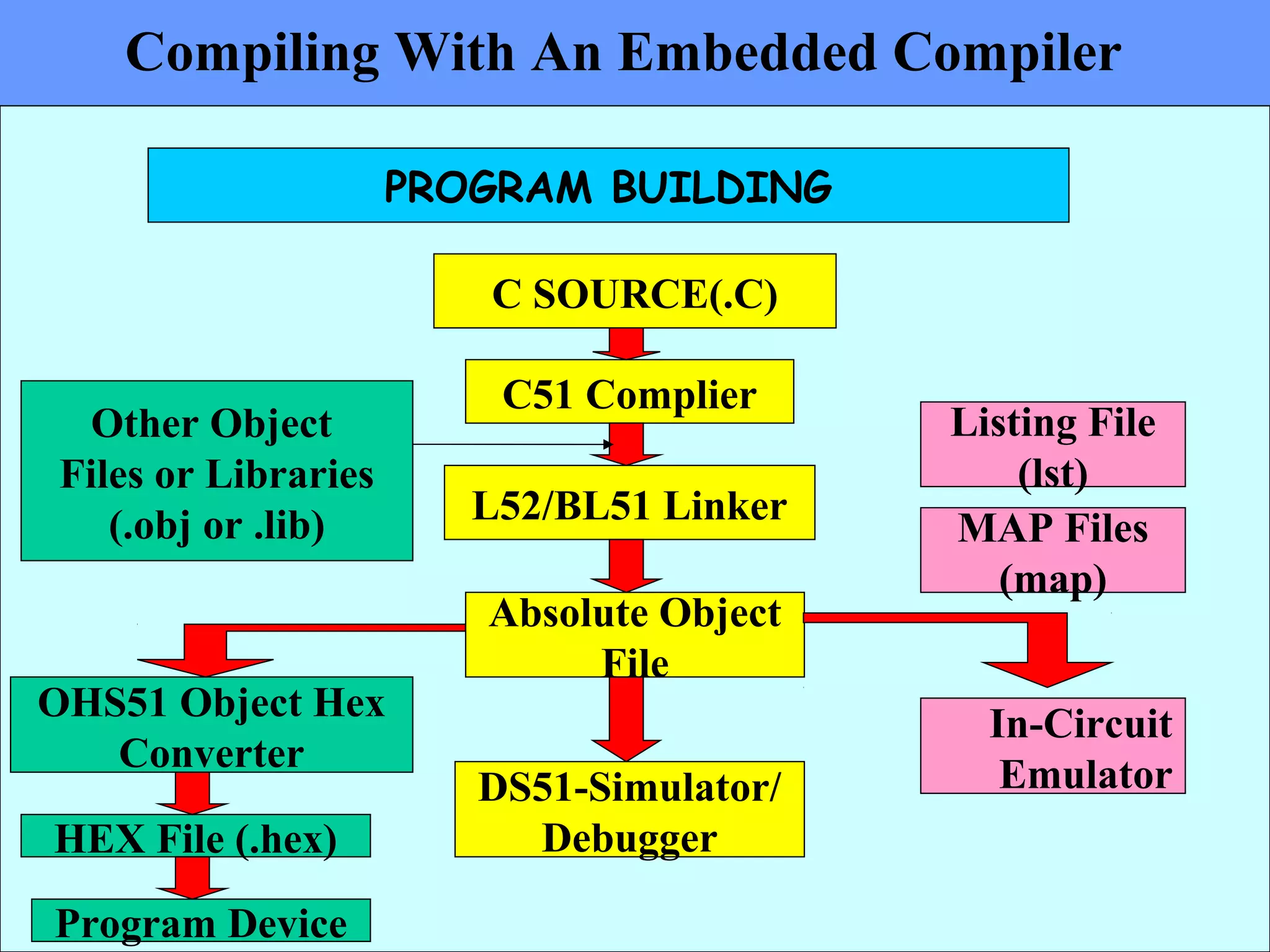
Detailed steps of compiling Embedded C code, the formation of multiple output files during compilation.
Identifying error levels during compilation, types of errors, and their diagnostic support through library functions.
Functionality of cross compilers in editing, compiling, and the significance of object files in program building.
Functionality of debuggers and linkers in managing object files, and the process of generating executable formats.
Concepts of locators for creating binary images and emulators simulating target systems for development.
Use of simulators in verifying program flow and functionality, integrated development environments for debugging.
Rules for optimizing Embedded C code, including variable management, function parameters, and proper coding standards.