The document summarizes key concepts in rotational motion, including:
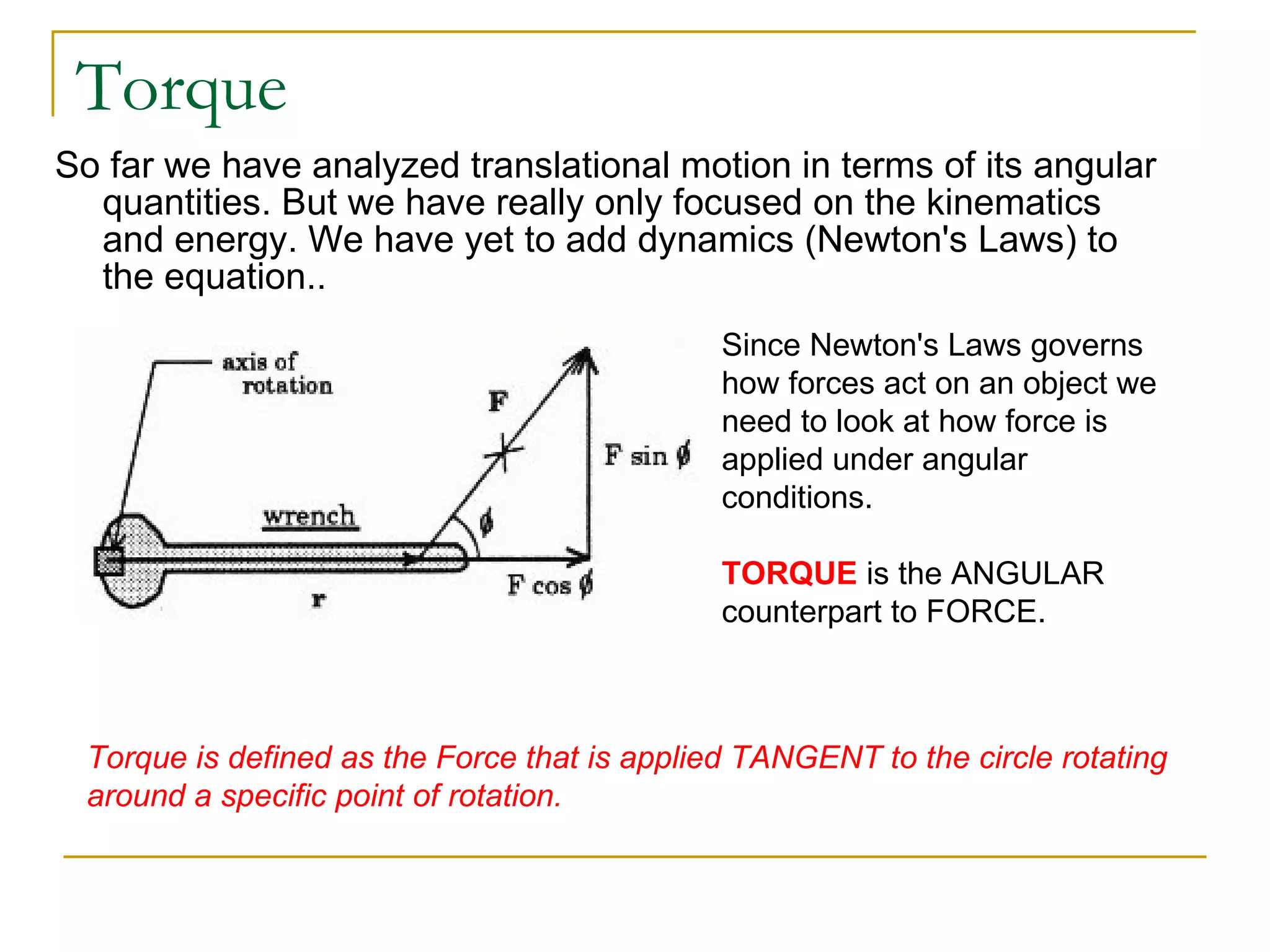
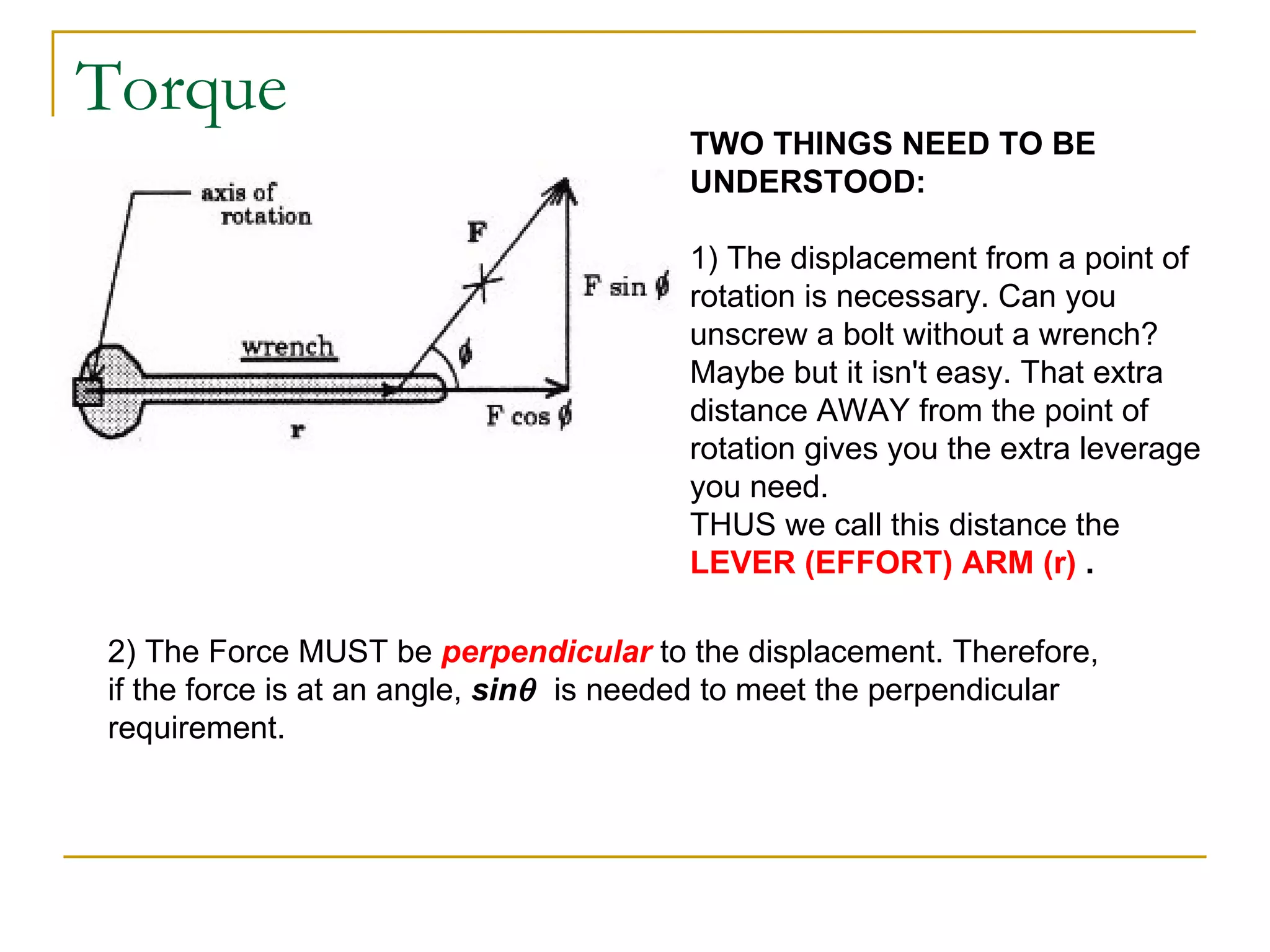
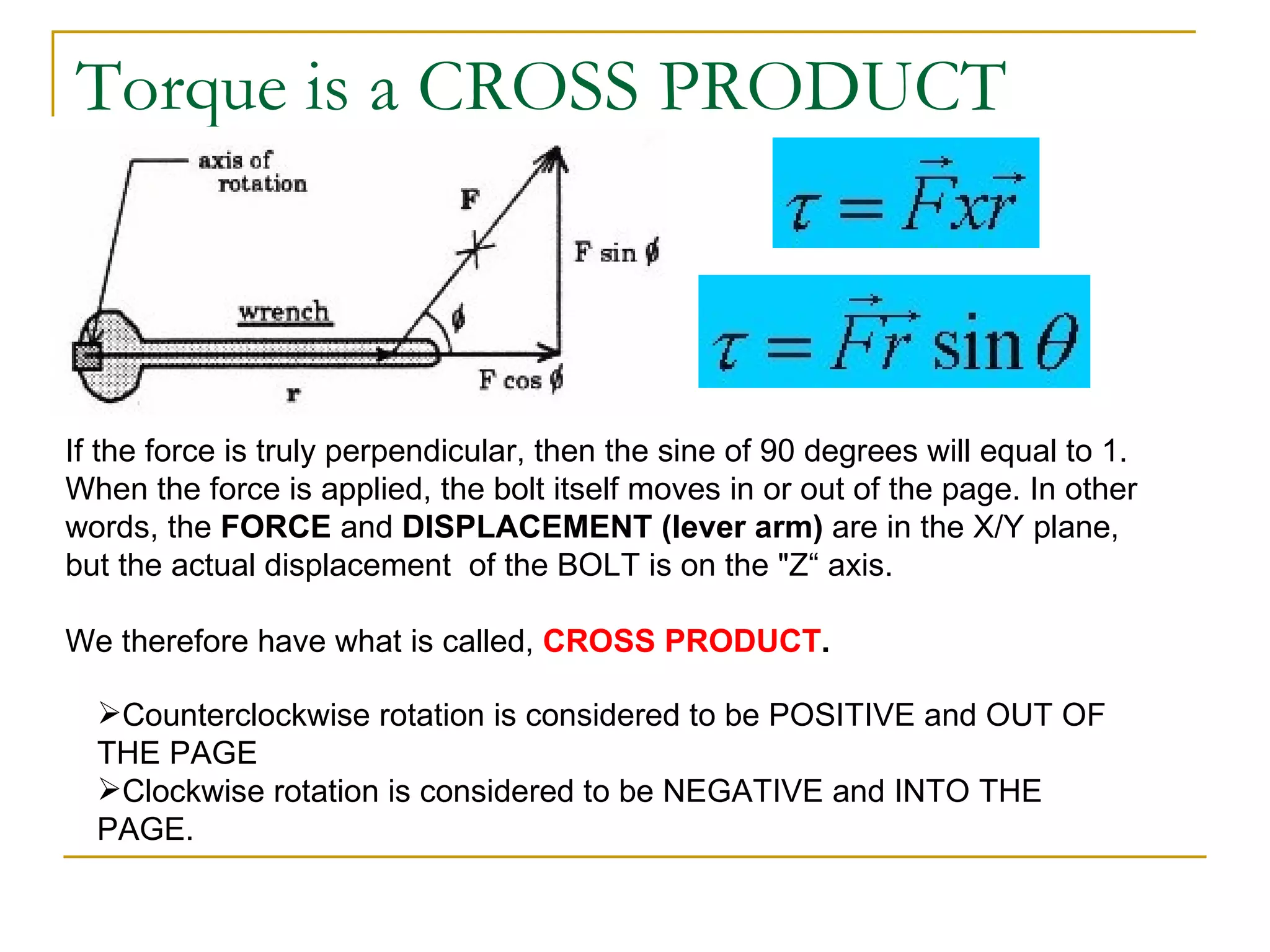
1) Torque is defined as the force applied tangentially to an object's axis of rotation, and is proportional to the lever arm and perpendicular force.
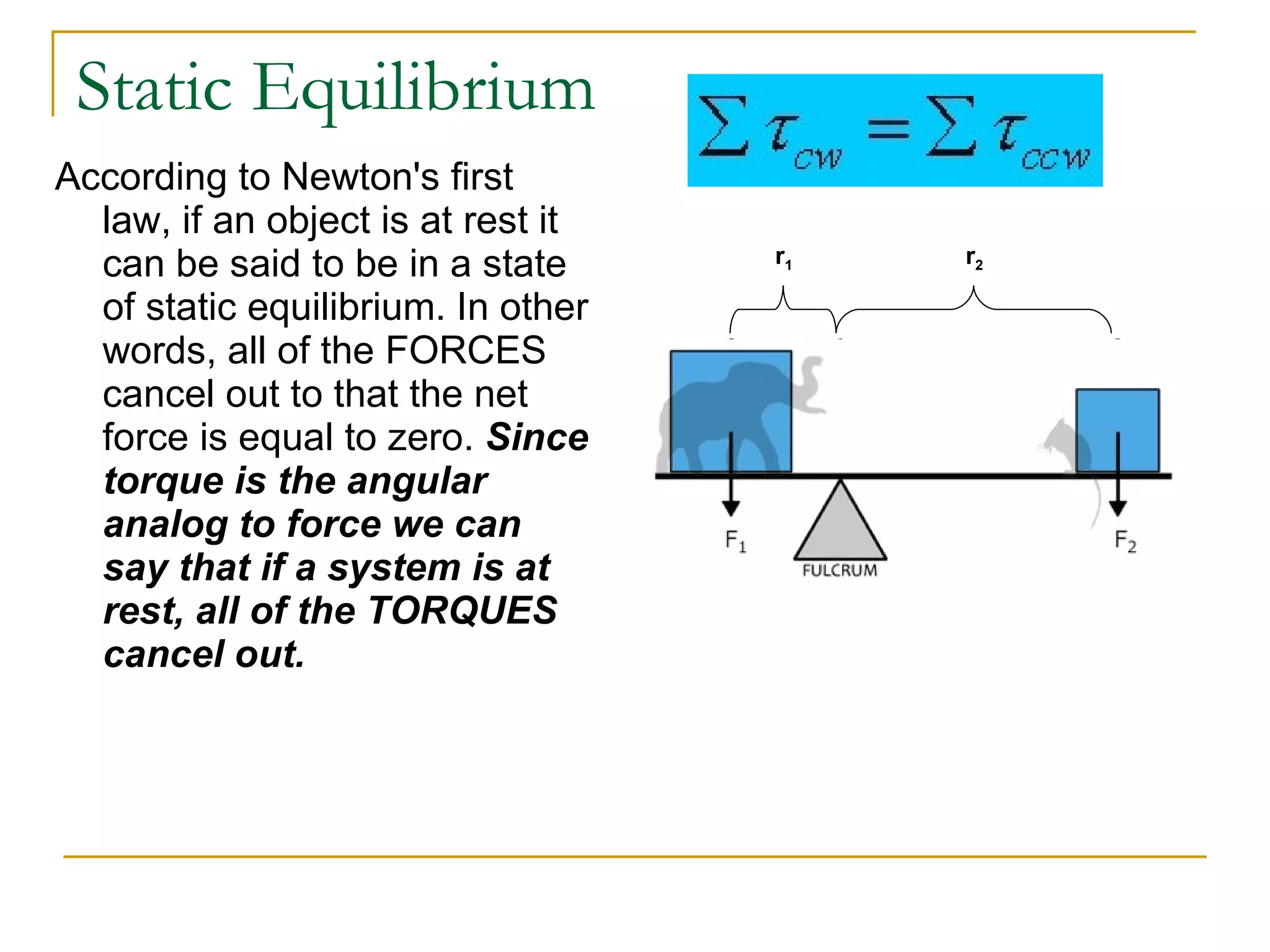
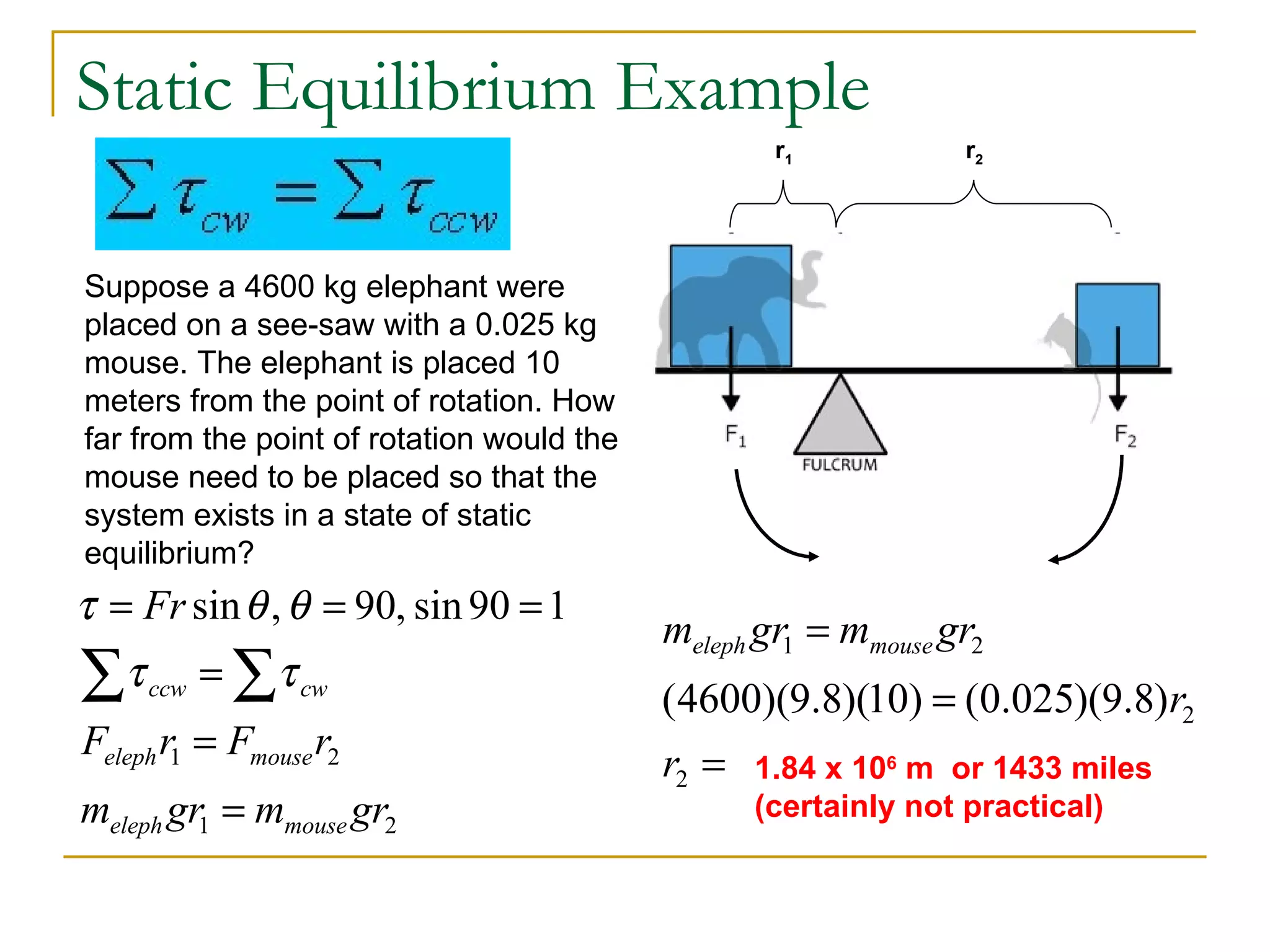
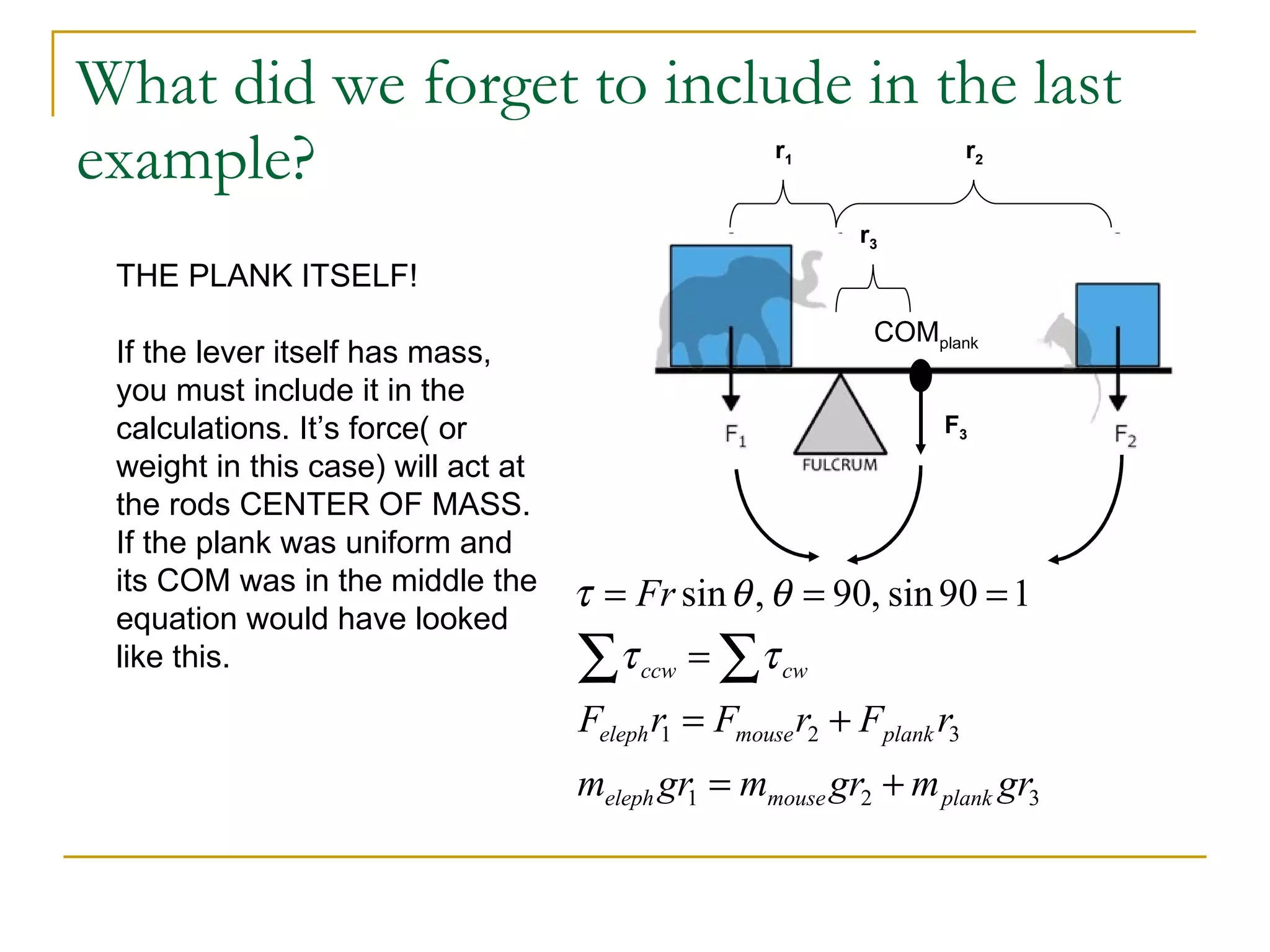
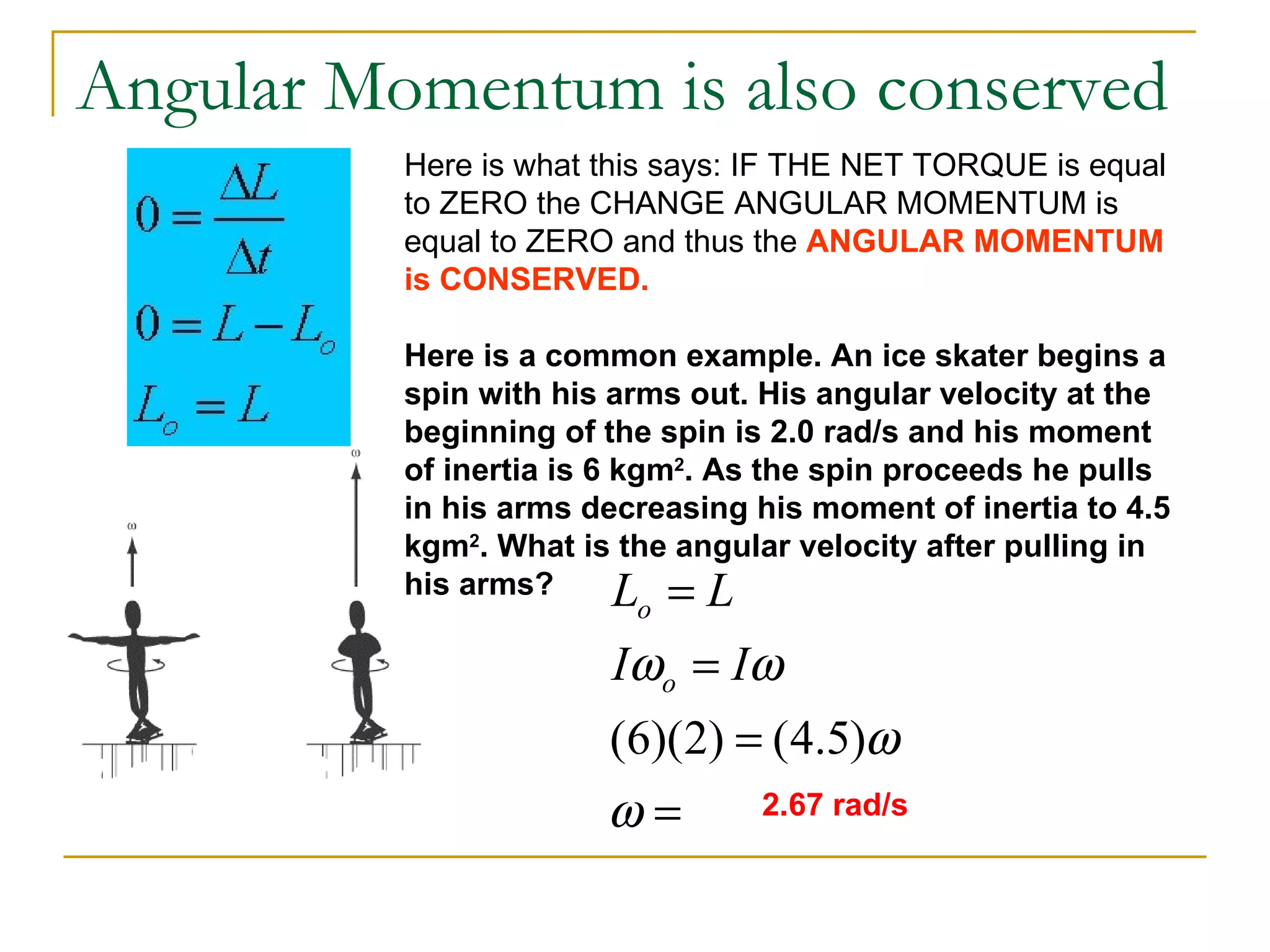
2) Static equilibrium occurs when the net torque on a system is zero, meaning torques cancel out.
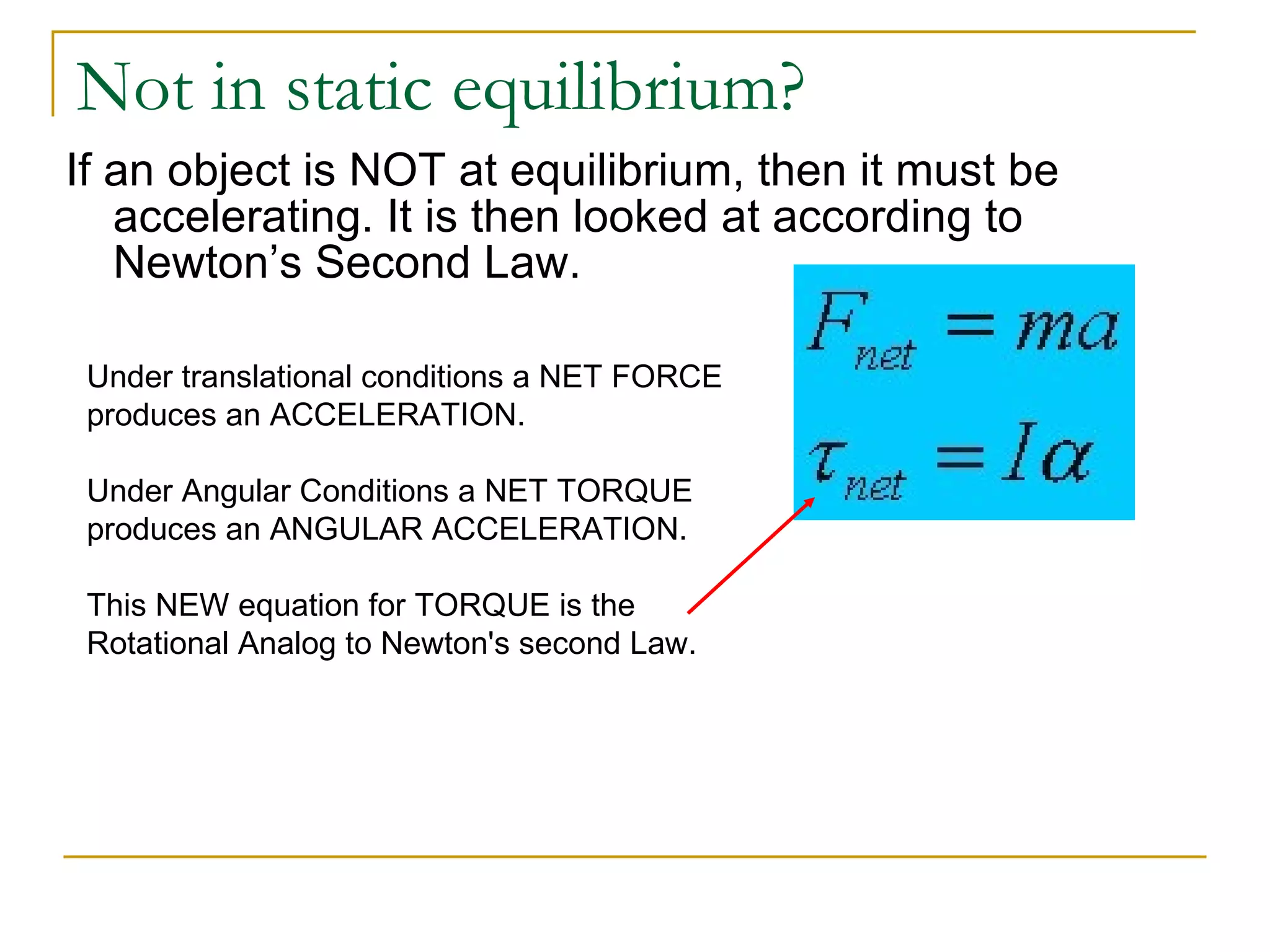
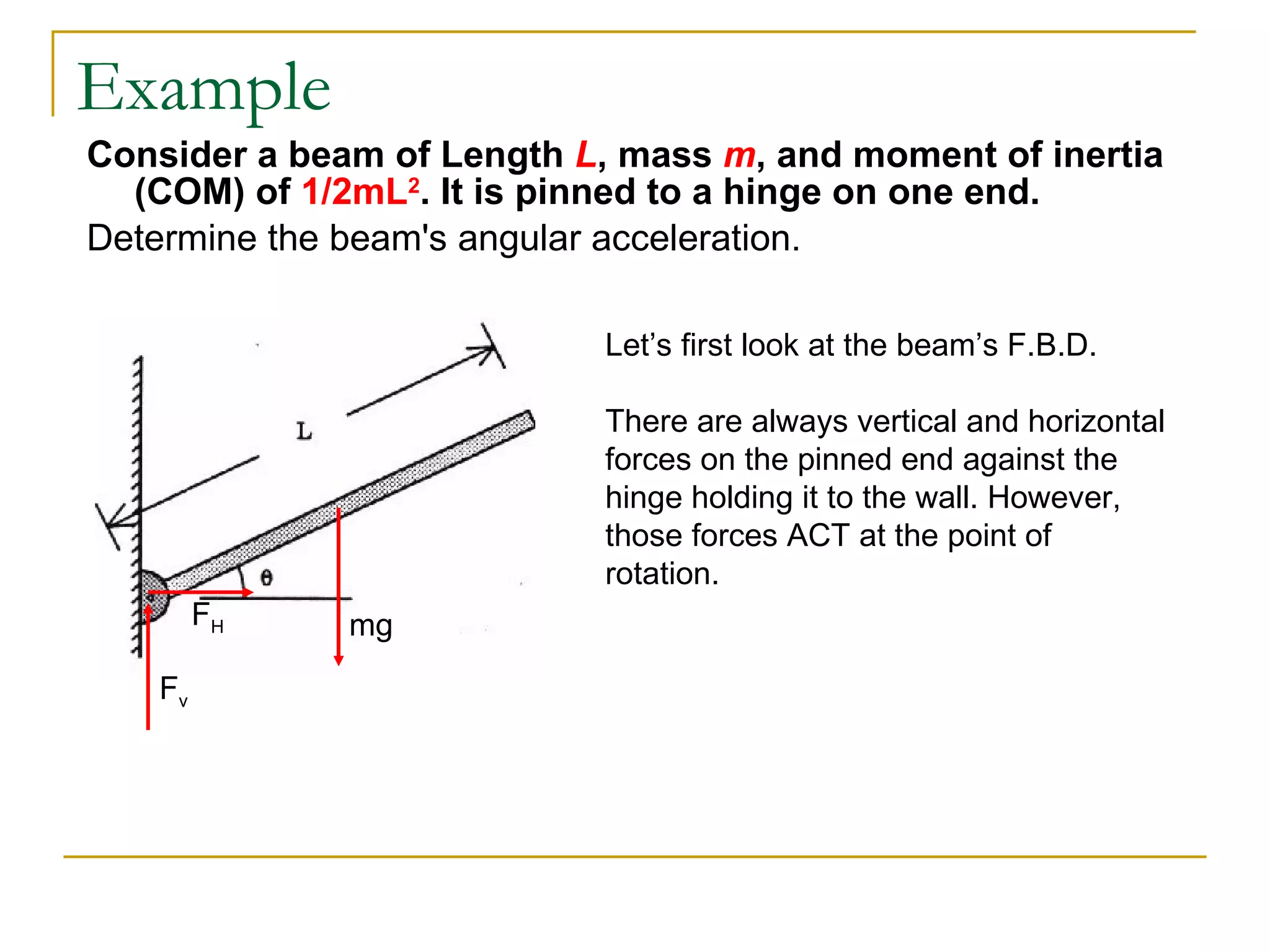
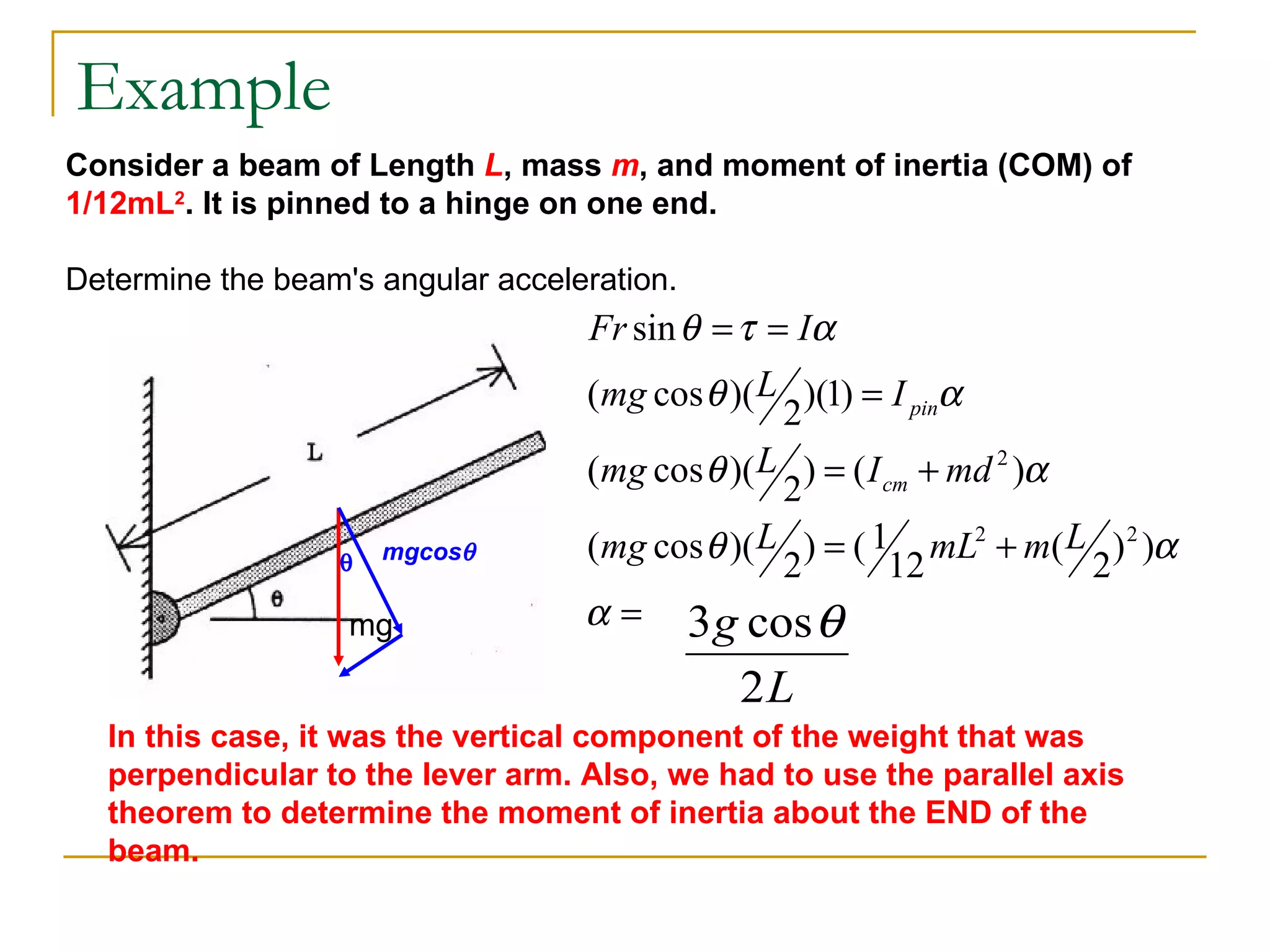
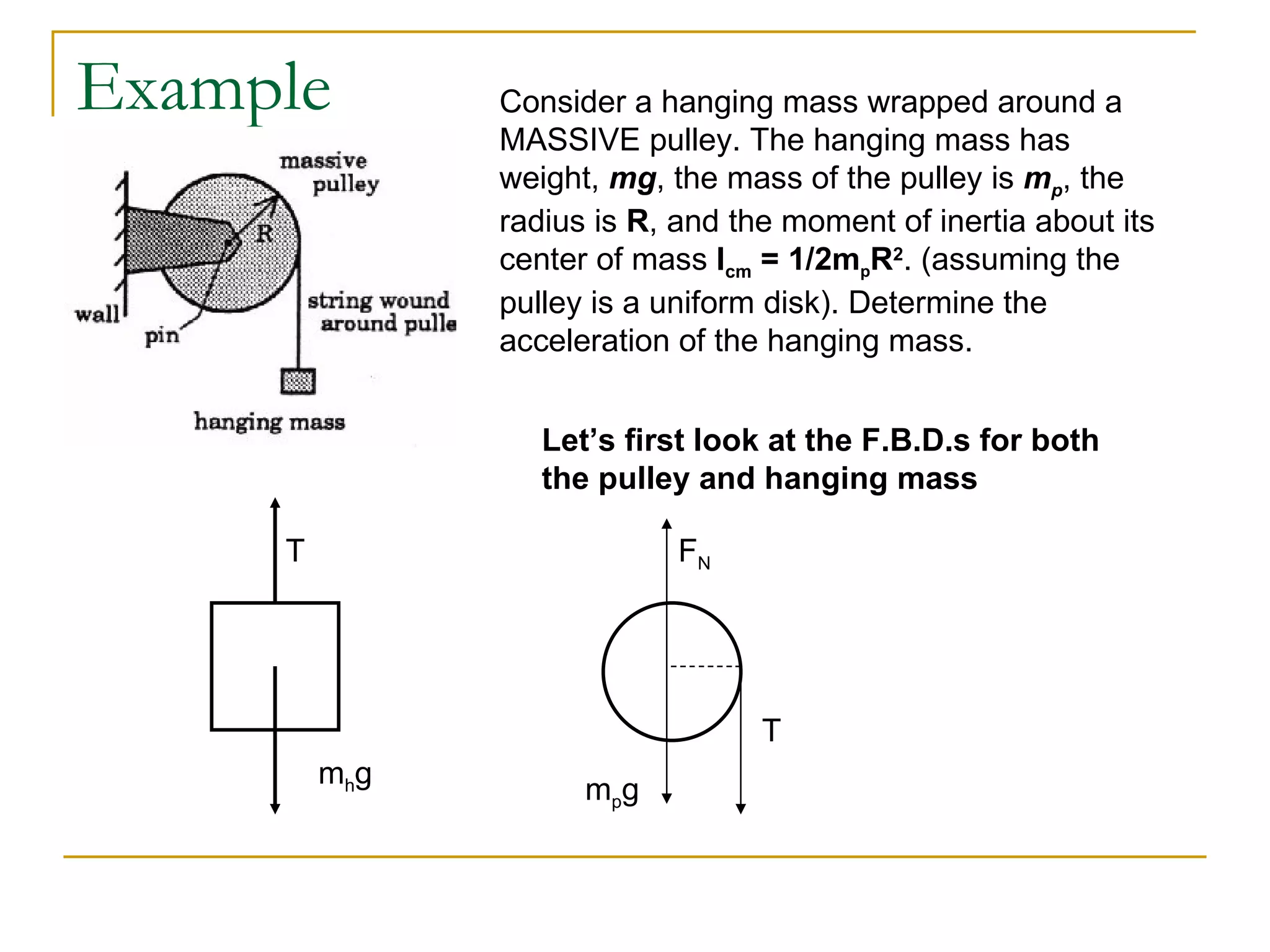
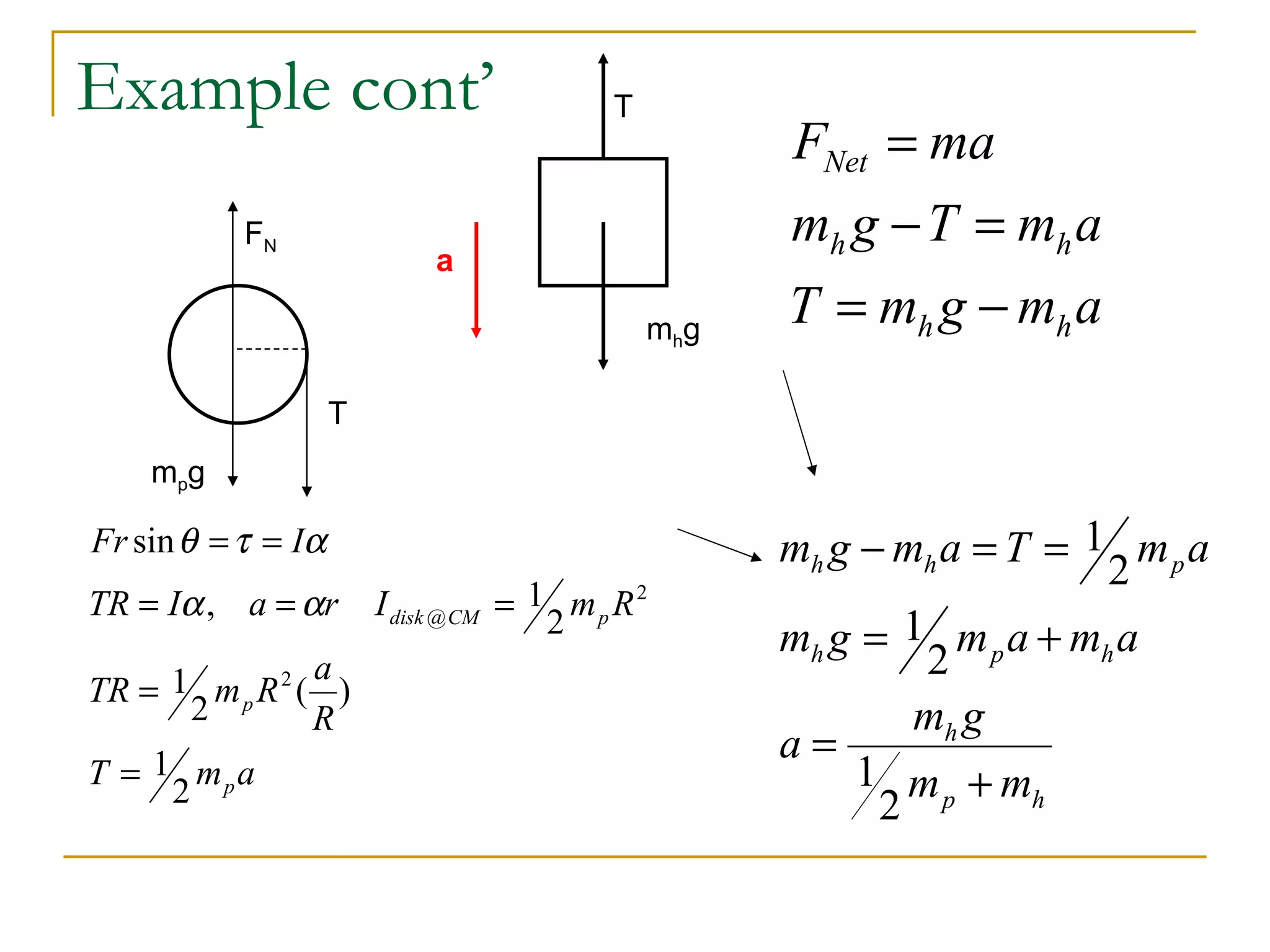
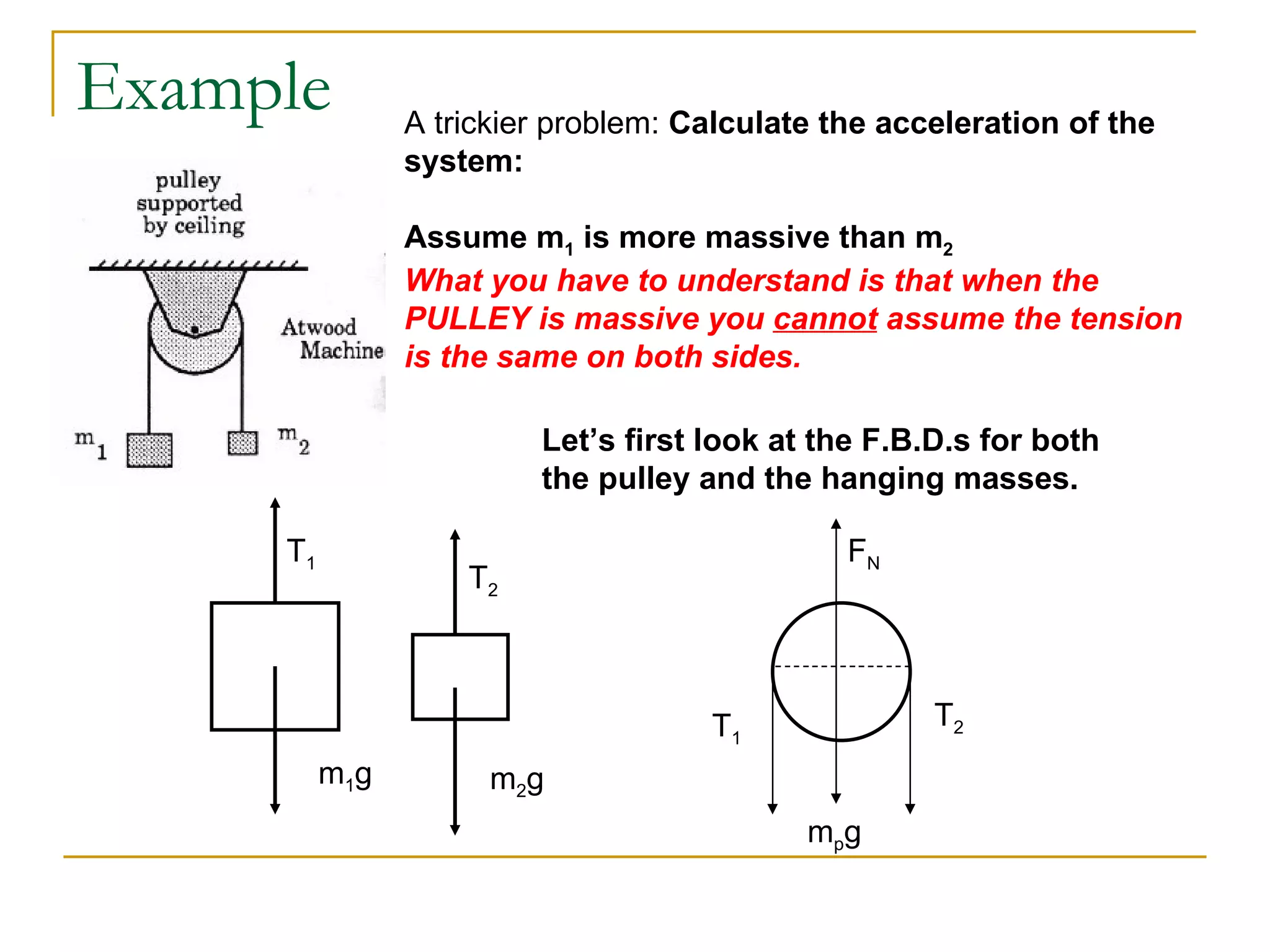
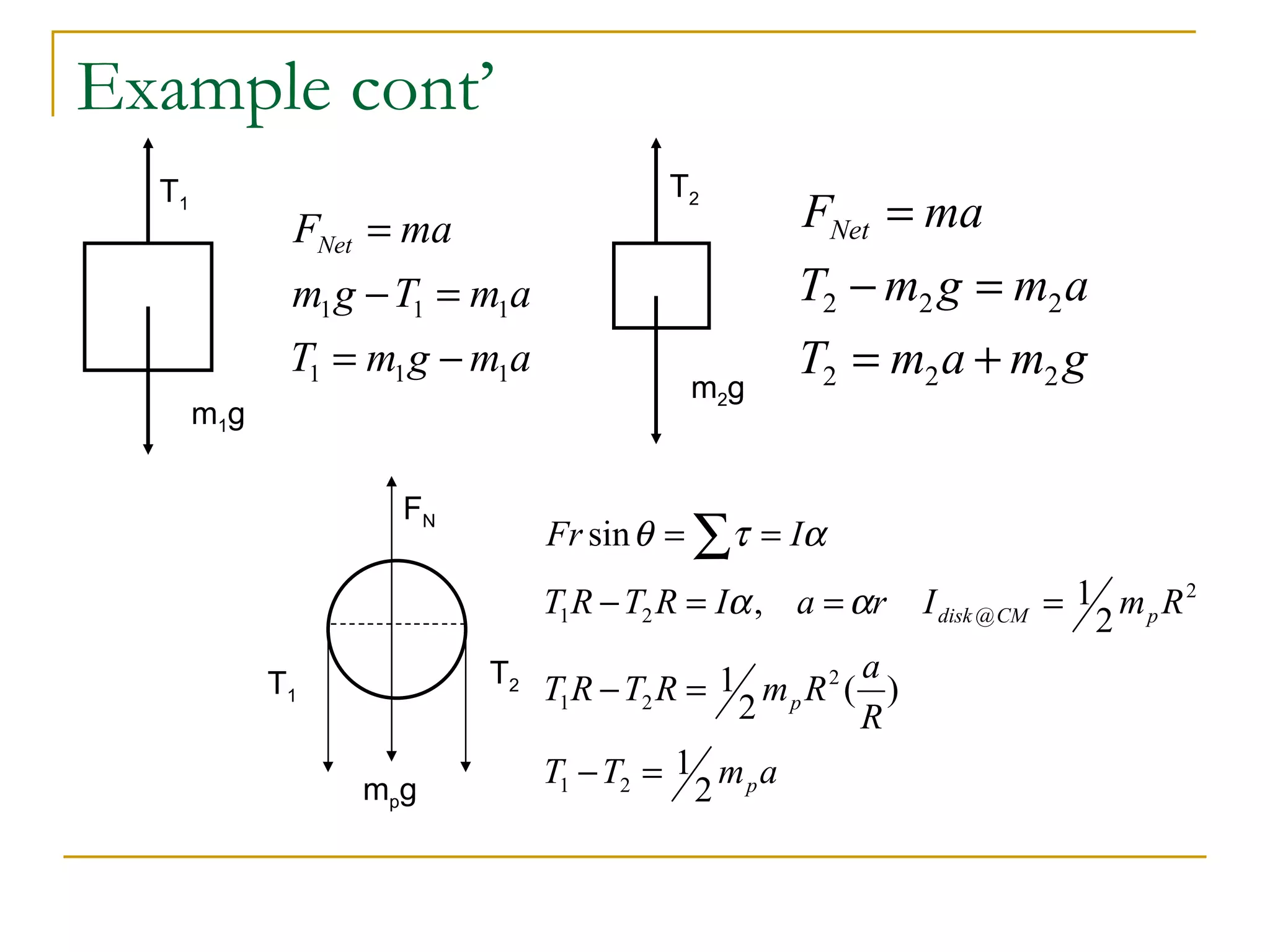
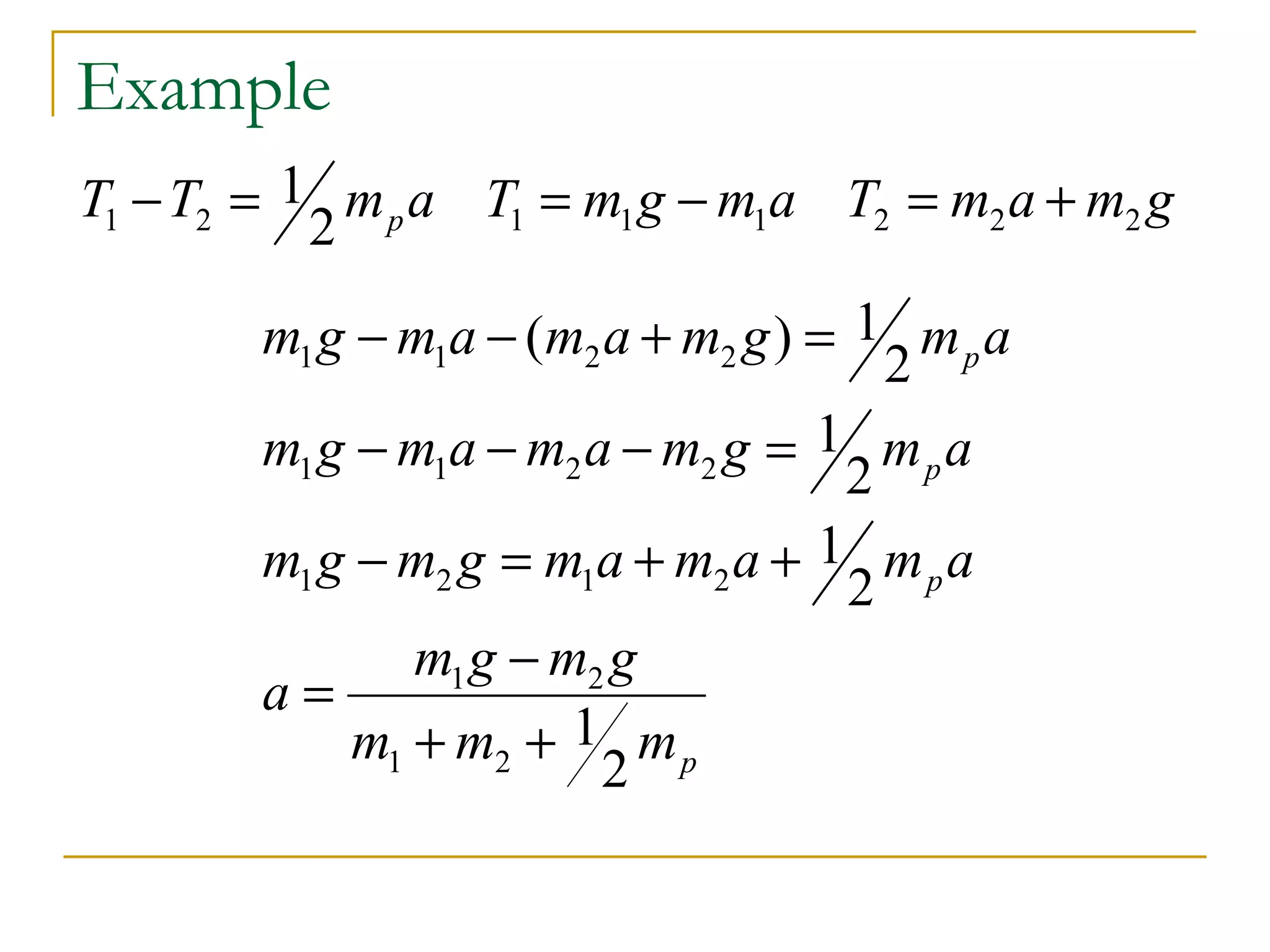
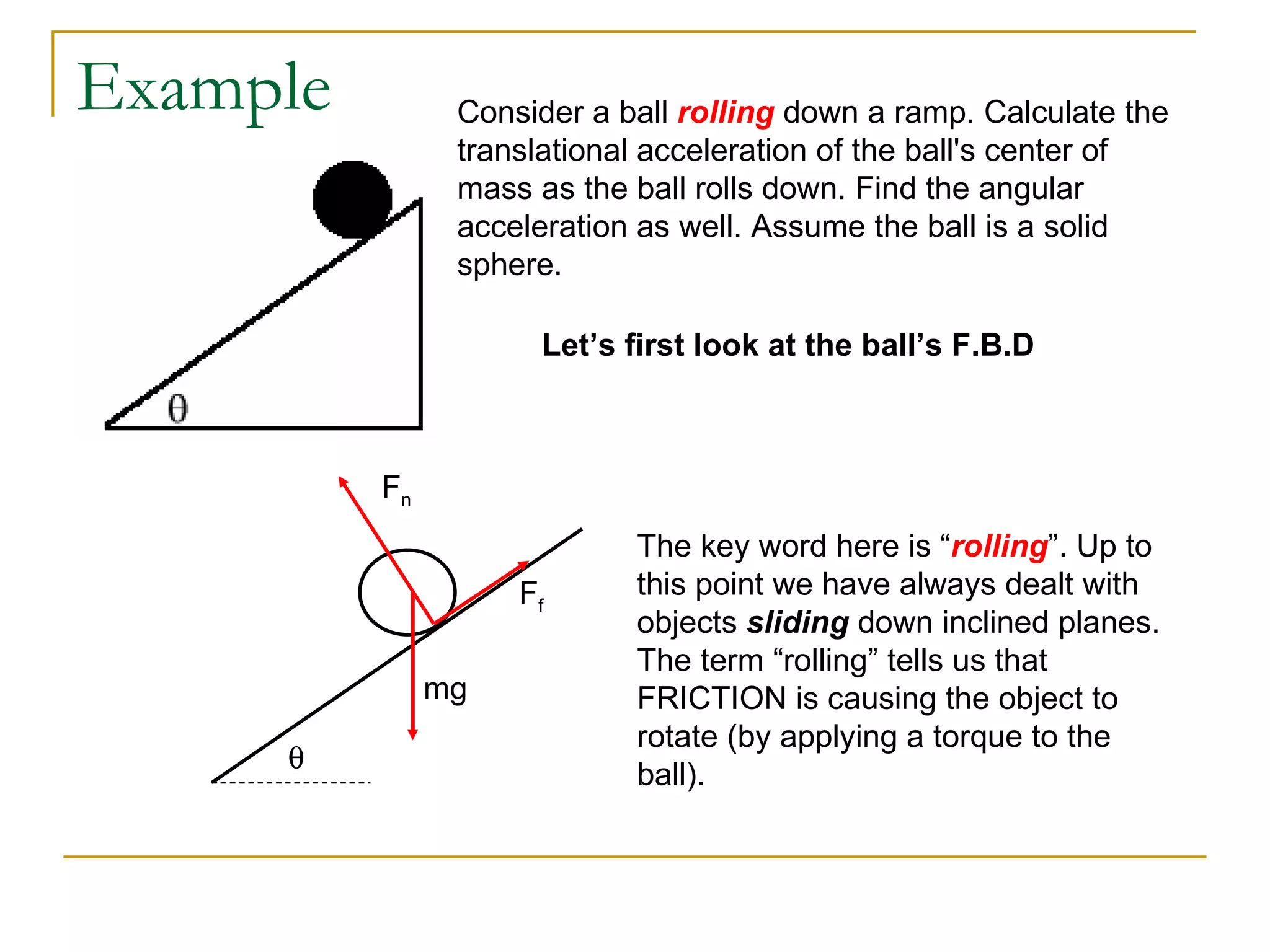
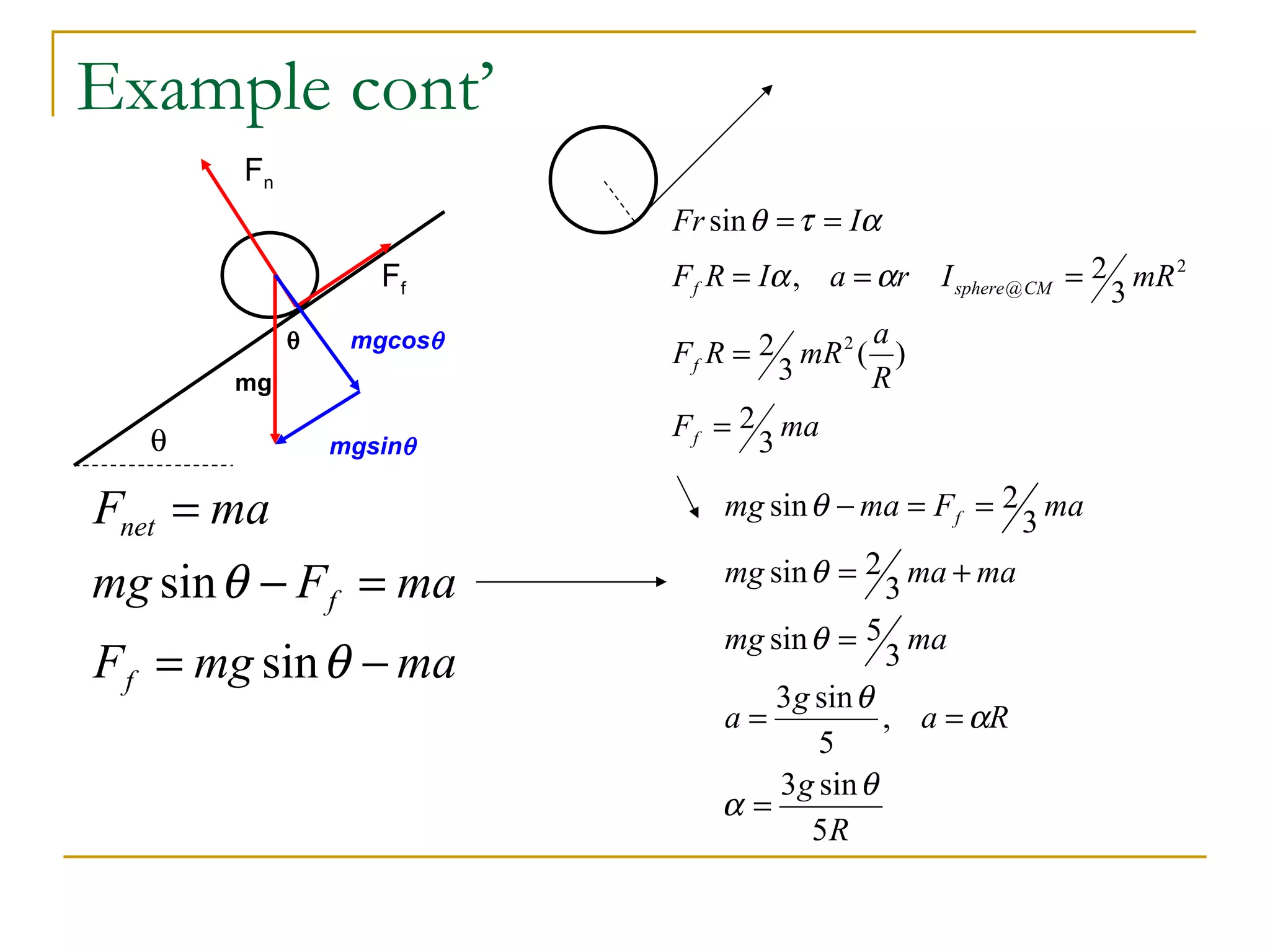
3) For objects experiencing angular acceleration, net torque is related to angular acceleration by an angular analogue of Newton's Second Law.