Downloaded 103 times
![[course site]
Day 2 Lecture 1
Multilayer Perceptron
Elisa Sayrol](https://image.slidesharecdn.com/dlai2017d2l1multilayerperceptron-170926130833/85/Multilayer-Perceptron-DLAI-D1L2-2017-UPC-Deep-Learning-for-Artificial-Intelligence-1-320.jpg)
![[course site]
Day 2 Lecture 1
Multilayer Perceptron
Elisa Sayrol](https://image.slidesharecdn.com/dlai2017d2l1multilayerperceptron-170926130833/75/Multilayer-Perceptron-DLAI-D1L2-2017-UPC-Deep-Learning-for-Artificial-Intelligence-1-2048.jpg)


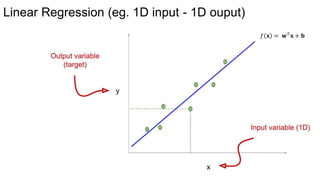
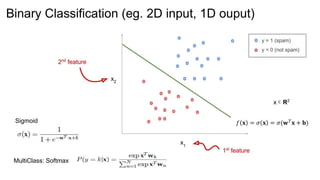
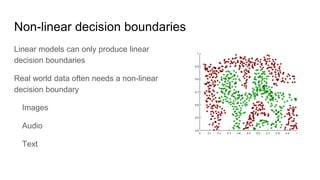
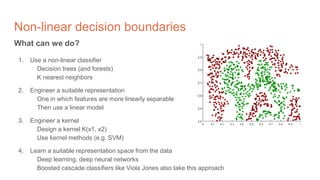
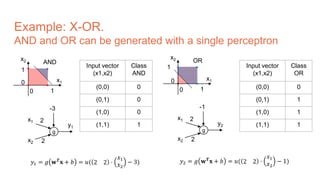
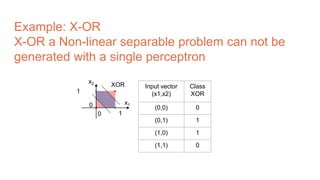
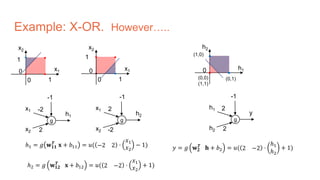
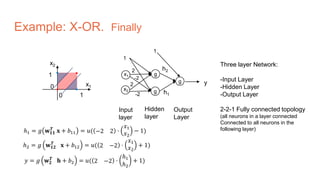
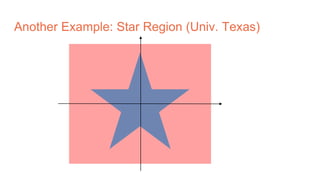
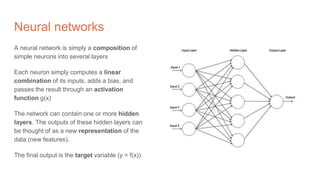
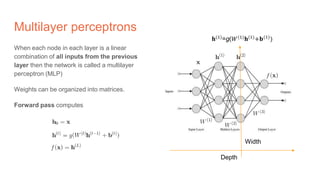
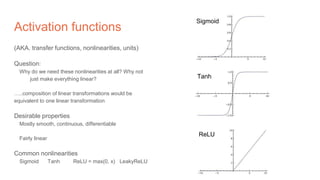
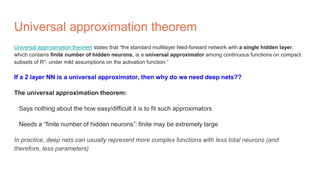
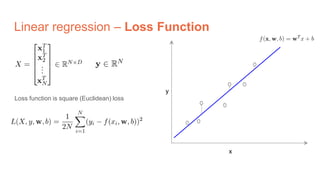
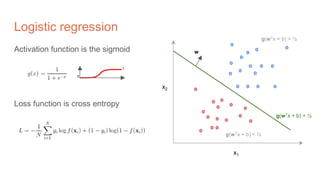
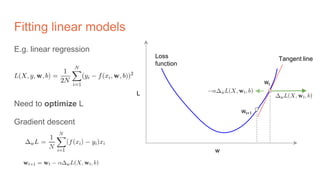
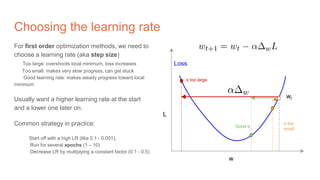

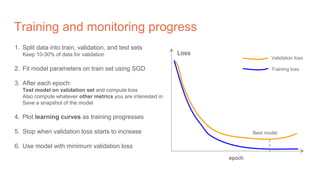
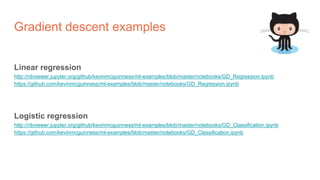
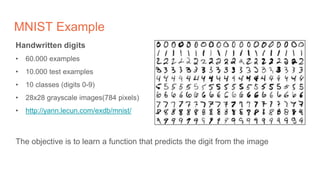
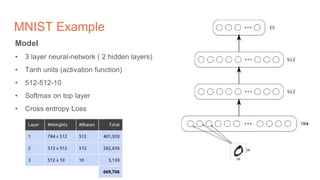
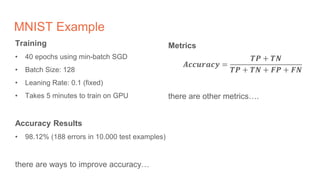

The document discusses the concepts of multilayer perceptrons and neural networks, contrasting linear and non-linear models to address real-world data that often requires non-linear decision boundaries. It explains the structure of neural networks, emphasizing the importance of activation functions and the universal approximation theorem, which asserts that multilayer networks can approximate continuous functions. Additionally, it covers training techniques such as gradient descent, validation, and accuracy metrics, highlighting the training of neural networks using specific datasets like MNIST.























































































![제 23회 보아즈(BOAZ) 빅데이터 컨퍼런스 - [MBOAX] : ABSA를 활용한 소비자 반응 분석 기반 운영 효율화 대시보드 설계](https://cdn.slidesharecdn.com/ss_thumbnails/3-1boaz23rdconferencemboax-260203102709-9d519923-thumbnail.jpg?width=640&height=640&fit=bounds)




