Download as PDF, PPTX




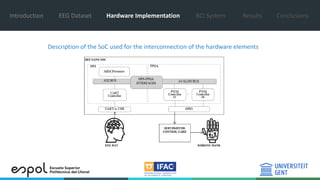


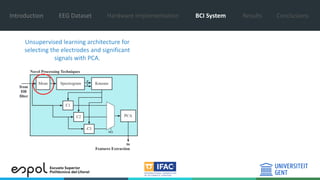

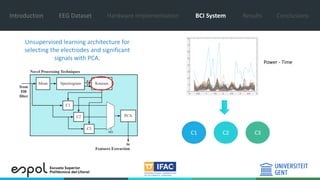
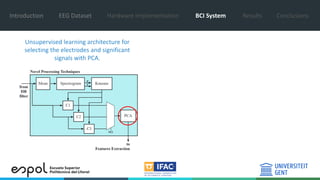

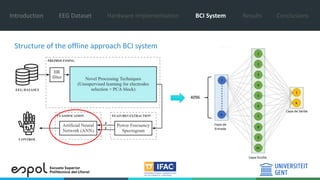
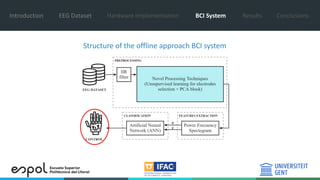
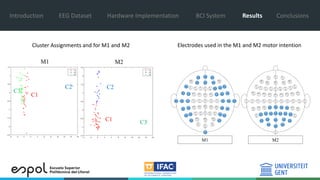
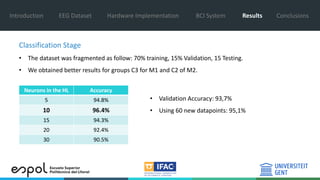




This document summarizes a study that developed a brain-computer interface (BCI) system using electroencephalography (EEG) for controlling a hand prosthesis. The system uses an unsupervised learning technique with k-means clustering and principal component analysis to select relevant electrodes and signals. This reduces processing costs and allows for real-time classification on an FPGA. The system achieved 95.1% accuracy in classifying motor intentions to open/close fists and flex/extend ankles using EEG data from selective electrodes near the motor and somatosensory cortices. The electrode selection technique enables processing EEG data efficiently for prosthesis control using affordable off-the-shelf hardware.