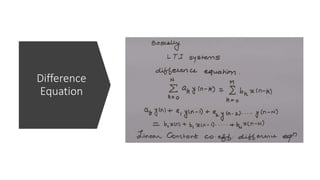
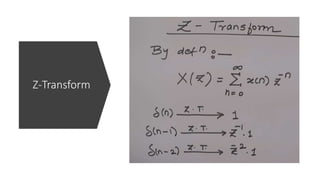
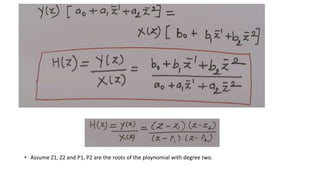
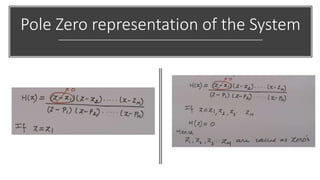
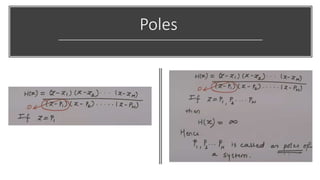
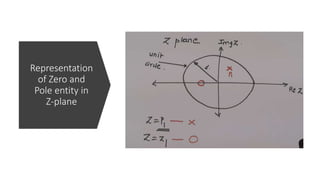
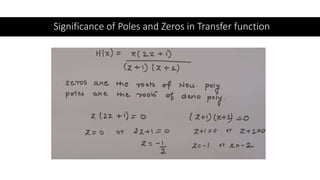
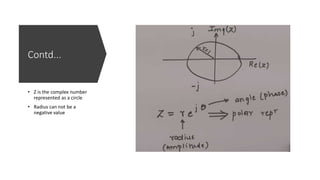
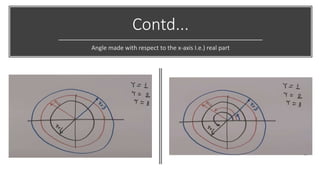
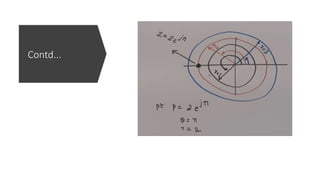
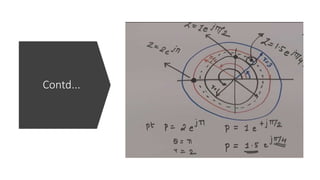
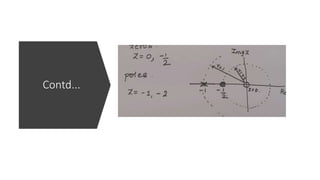
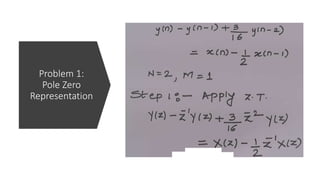
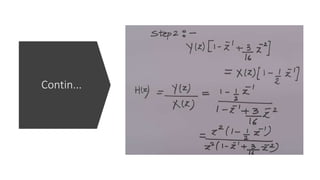
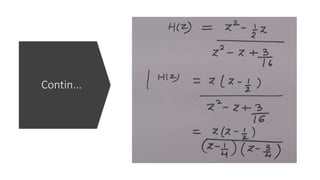
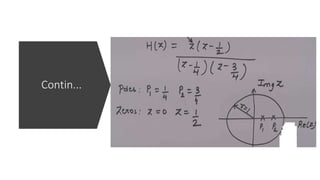
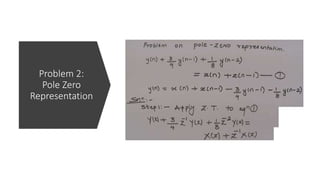
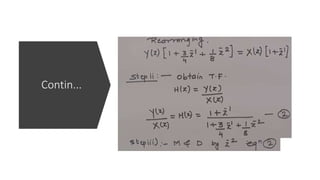
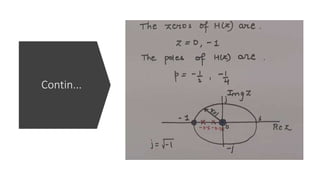
The document discusses the z-transform and its application to linear time-invariant (LTI) systems. It covers difference equations, system transfer functions, pole-zero representations, and the significance of poles and zeros. Poles and zeros are represented as points in the z-plane. Poles cause the transfer function to approach infinity while zeros cause it to approach zero. The locations of poles and zeros determine how a system responds to different input frequencies.















![Circuit Network Analysis - [Chapter5] Transfer function, frequency response, ...](https://cdn.slidesharecdn.com/ss_thumbnails/ch5-150613063859-lva1-app6891-thumbnail.jpg?width=640&height=640&fit=bounds)


































