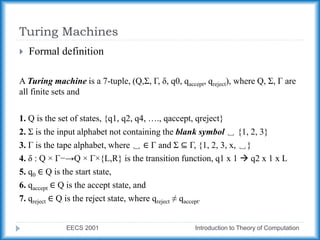
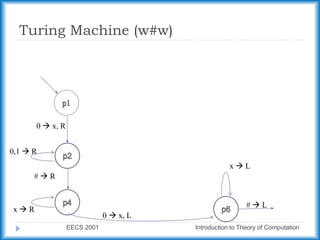
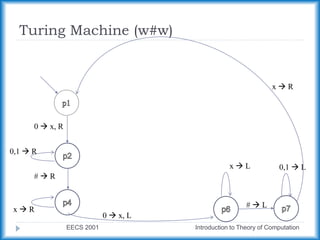
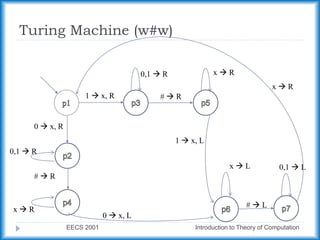
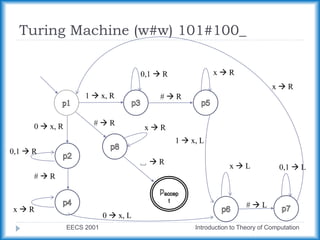
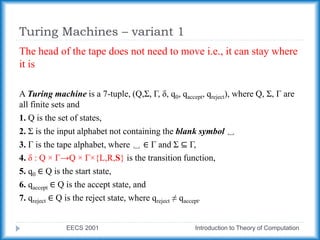
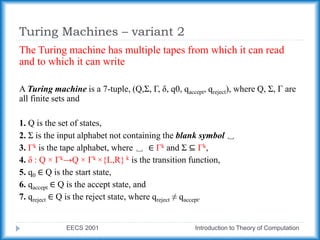
This document discusses Turing machines and their variants. It defines a standard Turing machine as having 7 components and explains how Turing machines can recognize languages. It also discusses variants of Turing machines that have additional capabilities, such as multiple tapes or non-determinism, and explains that these variants are equivalent in power to the standard Turing machine. The document provides examples of Turing machines and discusses important properties, such as how they characterize decidable and recognizable languages.