Download to read offline



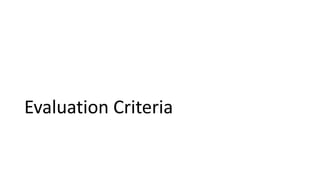
![Brain Organ Framework
(Standard external spec.)
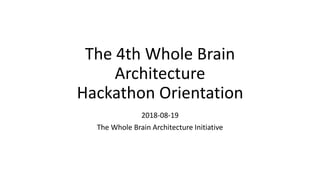
Recent activity at WBAI
Organizing connectivity, I/F, capability, tasks of brain organs as the specs of brain-inspired AGI
Agent
St.
ML
St.
St.
Environment
Tasks
(test)
Brain organ I/F
(Information
processing
semantics)
WBCA
(Connectome)
Capabilities of
brain organs
:Stub
:ML [WBA Development]
:Brain organs’ I/F
St.
ML](https://image.slidesharecdn.com/wbahackathonorientation180819e-180831120300/85/WBA-hackathon-2018-Orientation-5-320.jpg)
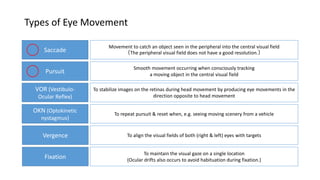
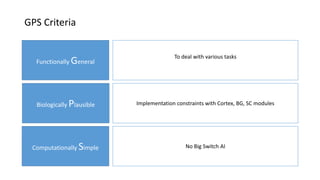
![R&D Scenario from now on
追加
Developme
nt
プロト
Developme
nt
プロト
Developme
nt
マージ
Developme
nt
プロト
Developme
nt
ML
St.
St.
St.
Environment
St.
ML
St.
St.
Environment
St.
St.
ML
St.
Environment
ML
ML
St.
St.
Environment
St.
St.
ML
ML
Environment
追加
Developme
nt
改良
Developme
nt
ML
ML
St.
St.
Environment
St.
ML
ML
ML
Environment
マージ
Developme
nt
ML
ML
ML
ML
Environment
Replacing with ML:Expanding inductive reasoning
Generality of Brain-
inspired Architecture① Brain organ
Framework design (I/F,
capability)
② Brain-
constrained
refactoring
Expansion
ML
ML
ML
ML
Environment
③ Meta-level
mechanism for
operating
representations
(Theory)
Complete
WBA
:Stub
:ML[WBA Development]
:Brain organs I/F
St.
ML
Entire
Architecture
Add
Prototype
Prototype
Merge
Prototype
ML
St.
St.
St.
Environment
St.
ML
St.
St.
Environment
St.
St.
ML
St.
Environment
ML
ML
St.
St.
Environment
St.
St.
ML
ML
Environment
Add
Improvement
ML
ML
St.
St.
Environment
St.
ML
ML
ML
Environment
Merge
ML
ML
ML
ML
Environment](https://image.slidesharecdn.com/wbahackathonorientation180819e-180831120300/85/WBA-hackathon-2018-Orientation-6-320.jpg)







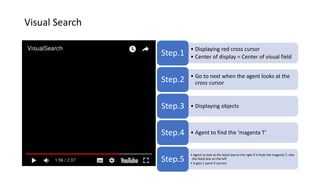




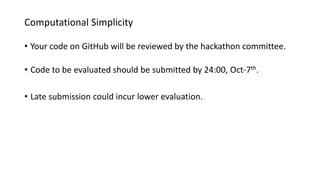



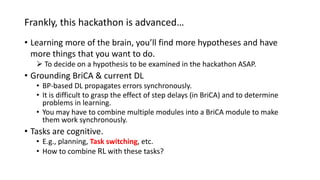
![Connection in Saccade
Environment
Retina
Visual
Cortex
LIP
FEF PFC
SC BG
Hippocampal
Formation
Retinal Accumulator
E
Location dependent accumulation
Non-Retinal
Accumulator
Allocentric location on the panel
Image
Blurring
the peripheral
Thru in Sample
Making Saliency Map
Location independent
accumulation
[[likelihood, ex, ey],
[likelihood, ex, ey],
…
[likelihood, ex, ey]]
Switching
allocentric location,
phases, etc.
Allocentric location
on the panel,
etc.?
Image
Saliency
Map
?
? ?
[likelihood_threshold,
likelihood_threshold,
…
likelihood_threshold]
?
?
Controlling thresholds for
accumulator likelihood
Action=[ex, ey] or None
?: to be created by the participants
Retinal
Image
Reward](https://image.slidesharecdn.com/wbahackathonorientation180819e-180831120300/85/WBA-hackathon-2018-Orientation-28-320.jpg)
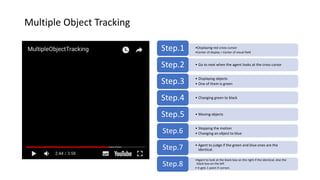
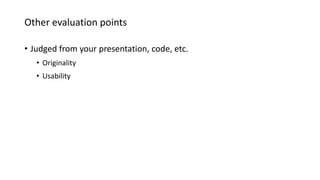
![Connection in Pursuit
Environment
Retina
Visual
Cortex
LIP
FEF PFC
SC BG
Hippocampal
Formation
Retinal Accumulator
E
Location dependent accumulation
Non-Retinal
Accumulator
Allocentric location on the panel
Image
Blurring
the peripheral
Thru in Sample
Making Saliency Map
Location independent
accumulation
[[likelihood, ex, ey],
[likelihood, ex, ey],
…
[likelihood, ex, ey]]
Switching
allocentric location,
phases, etc.
Allocentric location
on the panel,
etc.?
Image
Saliency
Map
?
? ?
[likelihood_threshold,
likelihood_threshold,
…
likelihood_threshold]
?
?
Controlling thresholds for
accumulator likelihood
Action=[ex, ey] or None
?: to be created by the participants
Retinal
Image
Reward
Cerebellum
Action=[ex, ey]
?](https://image.slidesharecdn.com/wbahackathonorientation180819e-180831120300/85/WBA-hackathon-2018-Orientation-29-320.jpg)



The document outlines the agenda and objectives for the 4th Whole Brain Architecture Hackathon, focusing on developing prototypes related to cognitive processes inspired by brain functions. Participants are encouraged to explore brain organ frameworks and implement machine learning modules to simulate asynchronous and parallel processing. Evaluation criteria include biological plausibility, computational simplicity, and successful task execution based on learning rates and decision-making speed.














![[DSC Europe 25] Dusan Pavlov - There Is No Spoon: Inferring Vision from Neura...](https://cdn.slidesharecdn.com/ss_thumbnails/wg0v1umoqjm4nnbd3p0v-there-is-no-spoon-251205085715-6d81d6c5-thumbnail.jpg?width=640&height=640&fit=bounds)












![[DSC Europe 22] Brain-Machine Intelligence: Past, Present and Future - Jelena...](https://cdn.slidesharecdn.com/ss_thumbnails/jelenamladenovicbrain-machineintelligencepastandfuture-221129232325-c76df201-thumbnail.jpg?width=640&height=640&fit=bounds)





















![Human Reproduction [ Reproductive System ] Notes @irfanullah_mehar Irfanullah...](https://cdn.slidesharecdn.com/ss_thumbnails/humanreproductionreproductivesystemnotesirfanullahmeharirfanullahmeharjanantantra-260111172350-56e85778-thumbnail.jpg?width=640&height=640&fit=bounds)

















