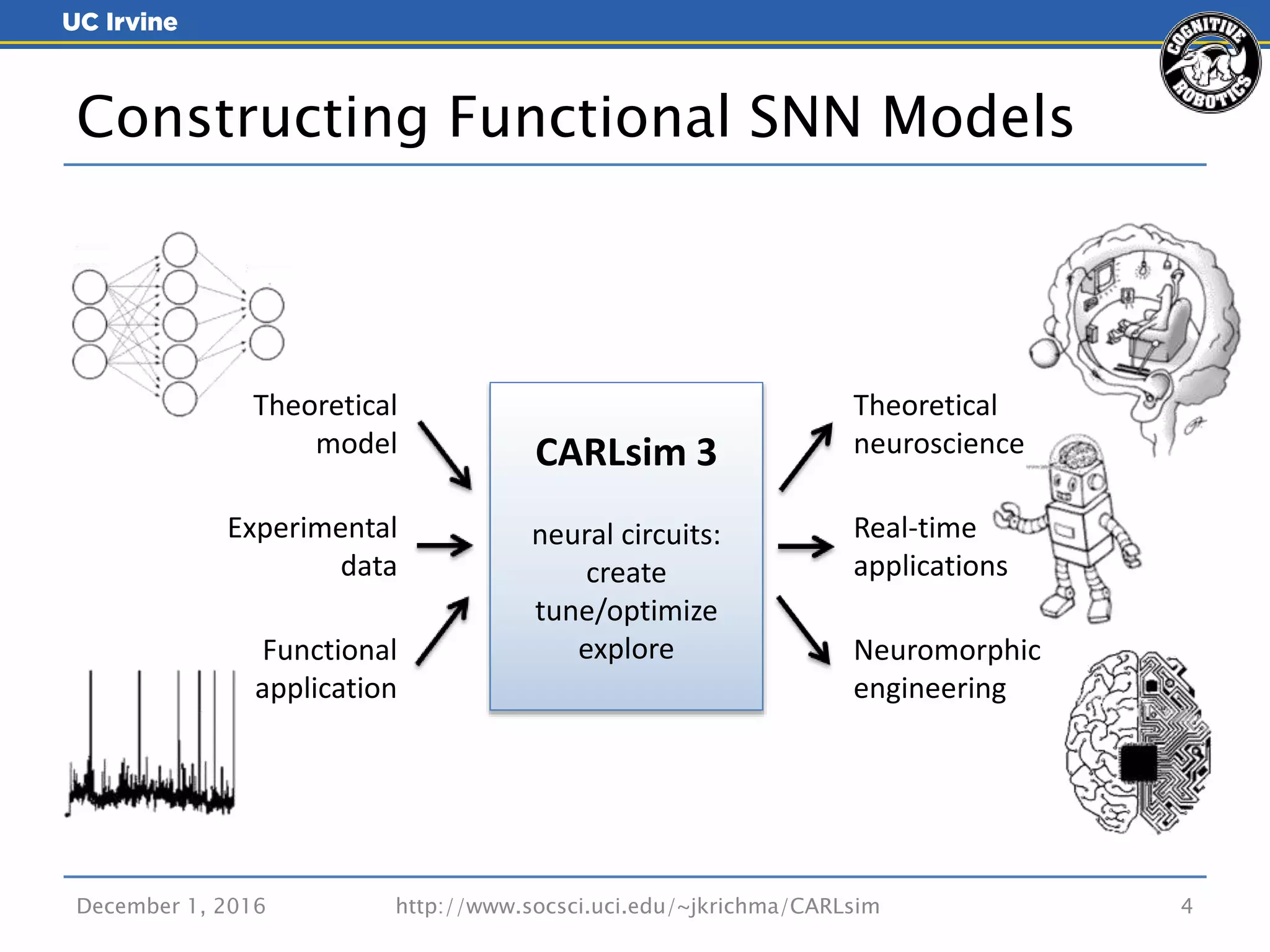
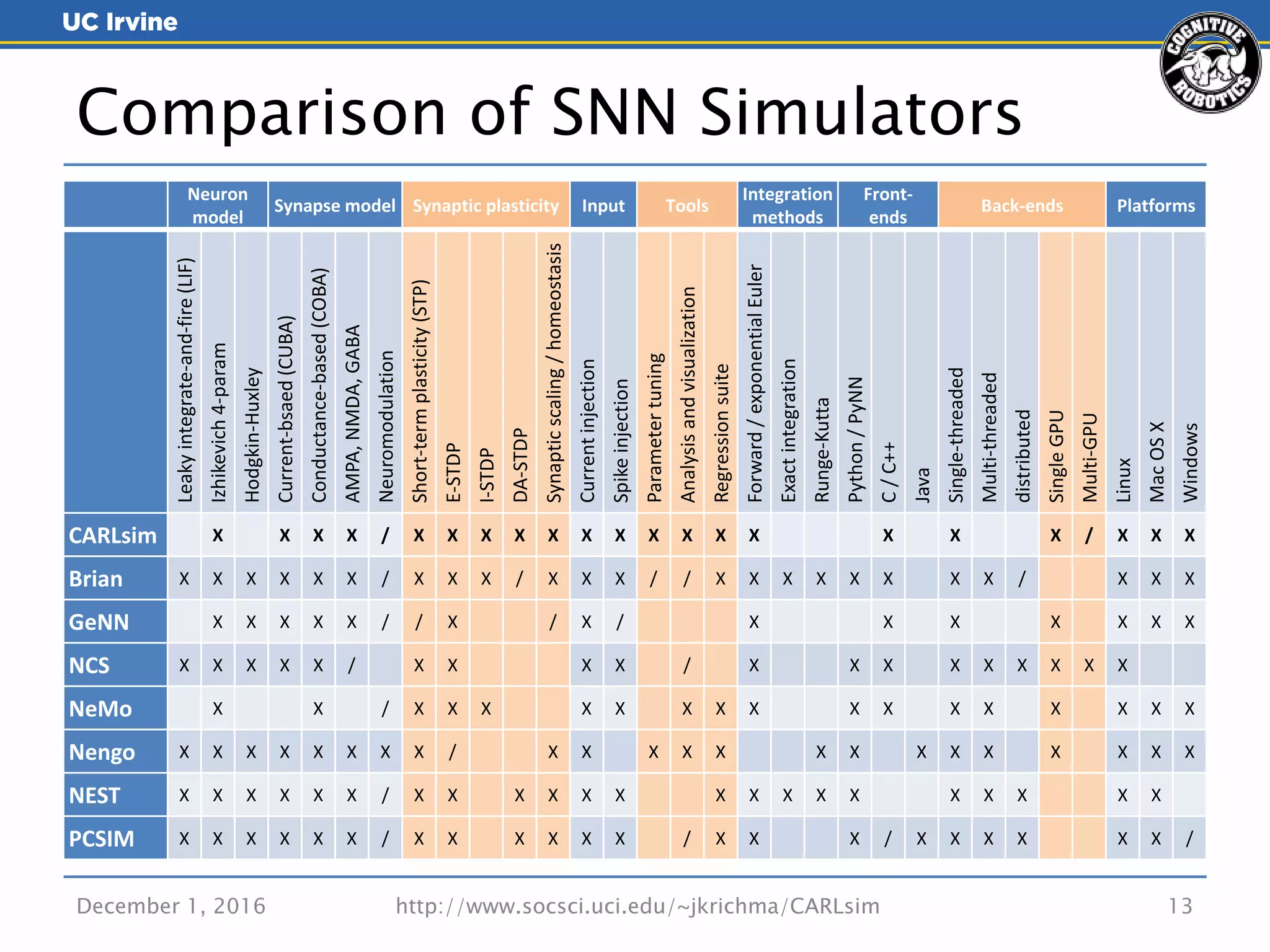
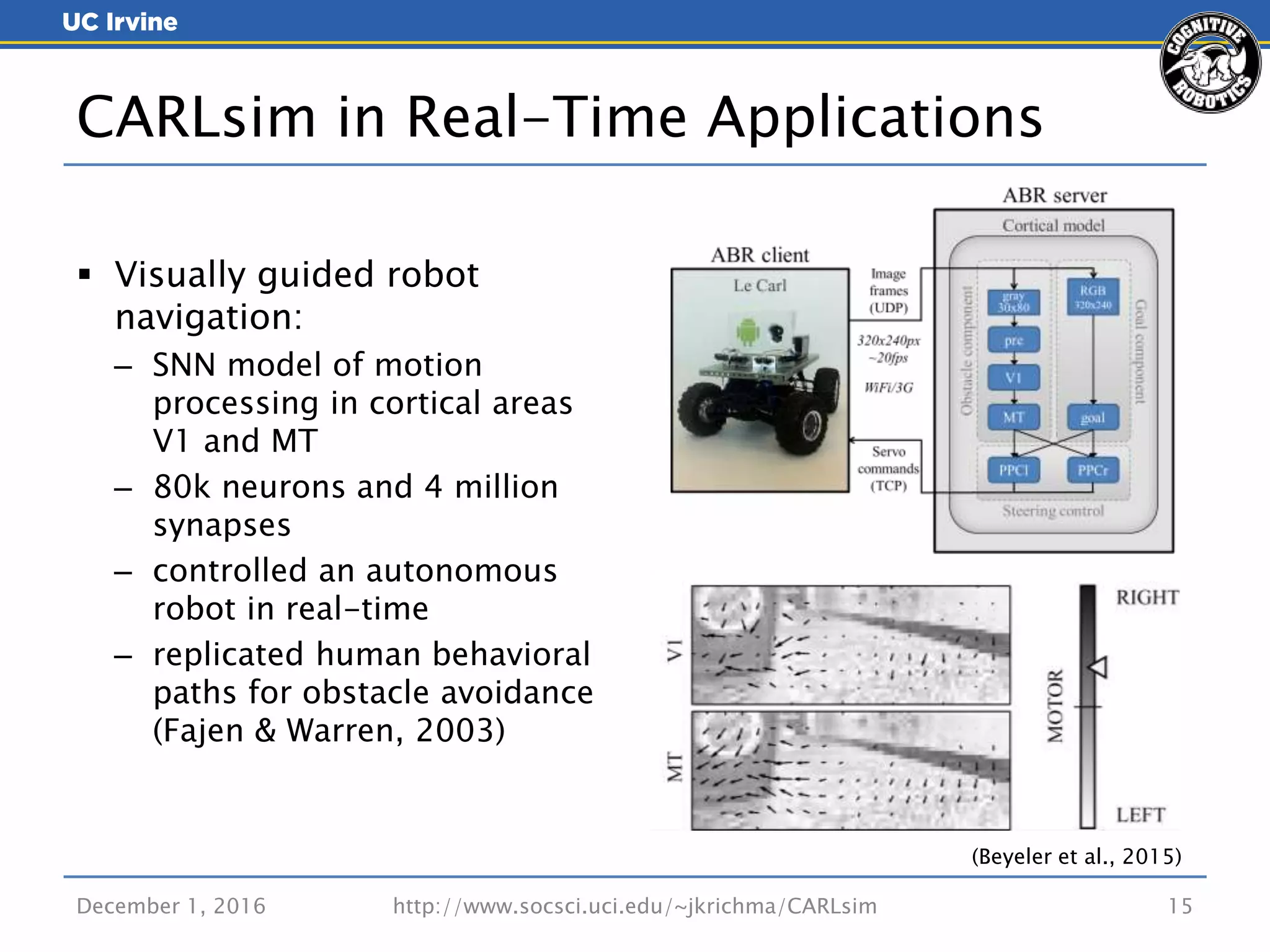
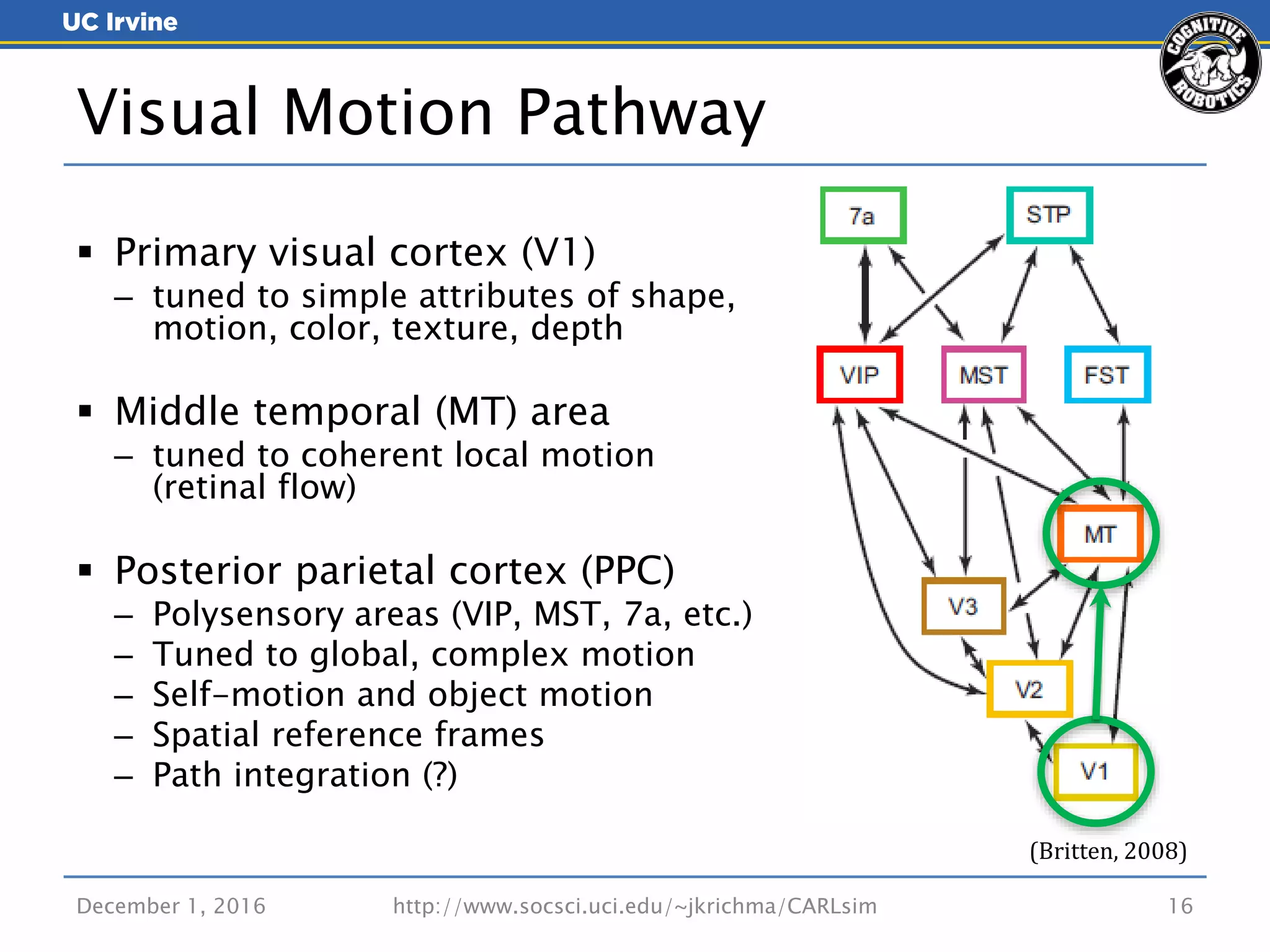
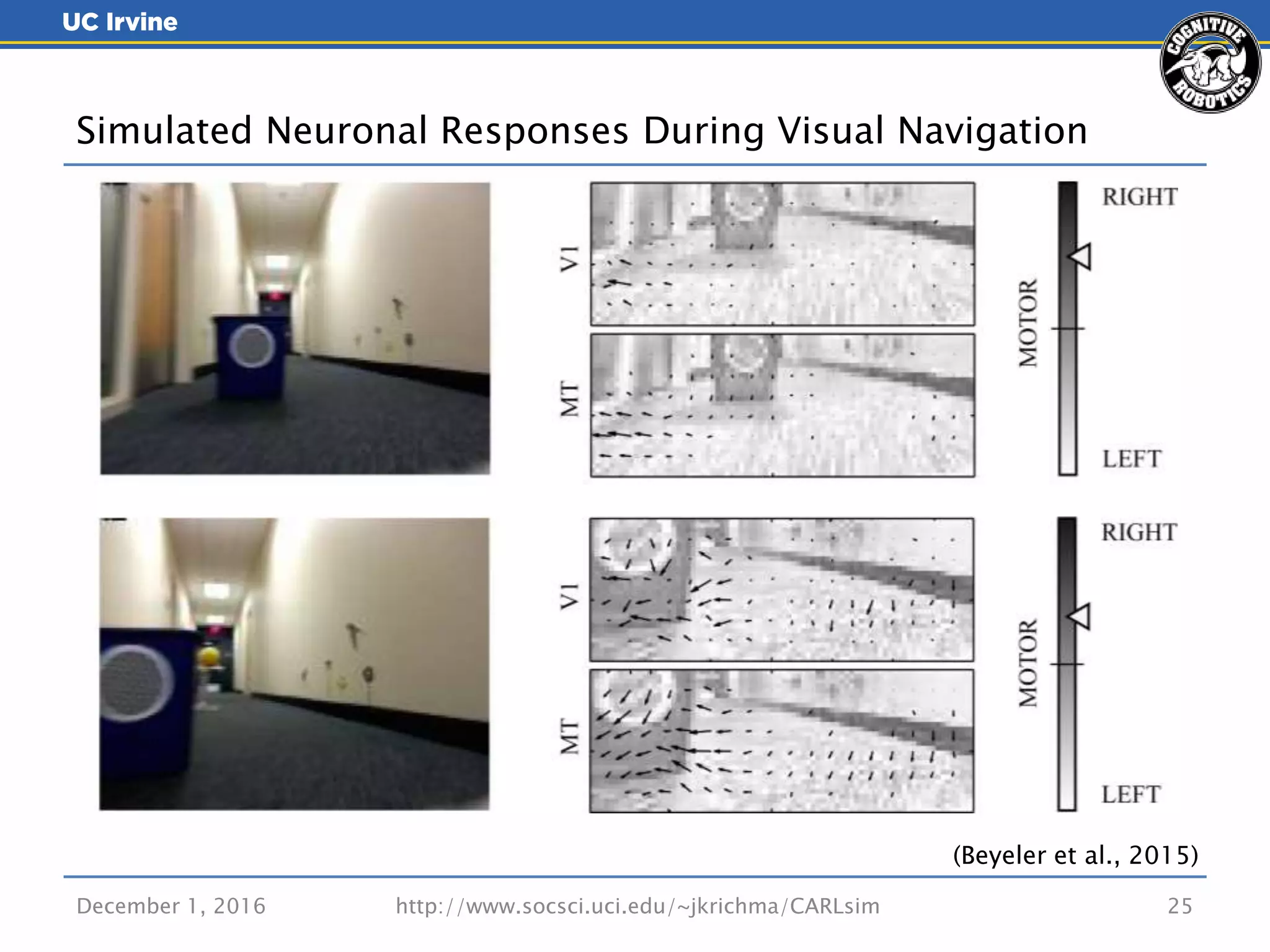
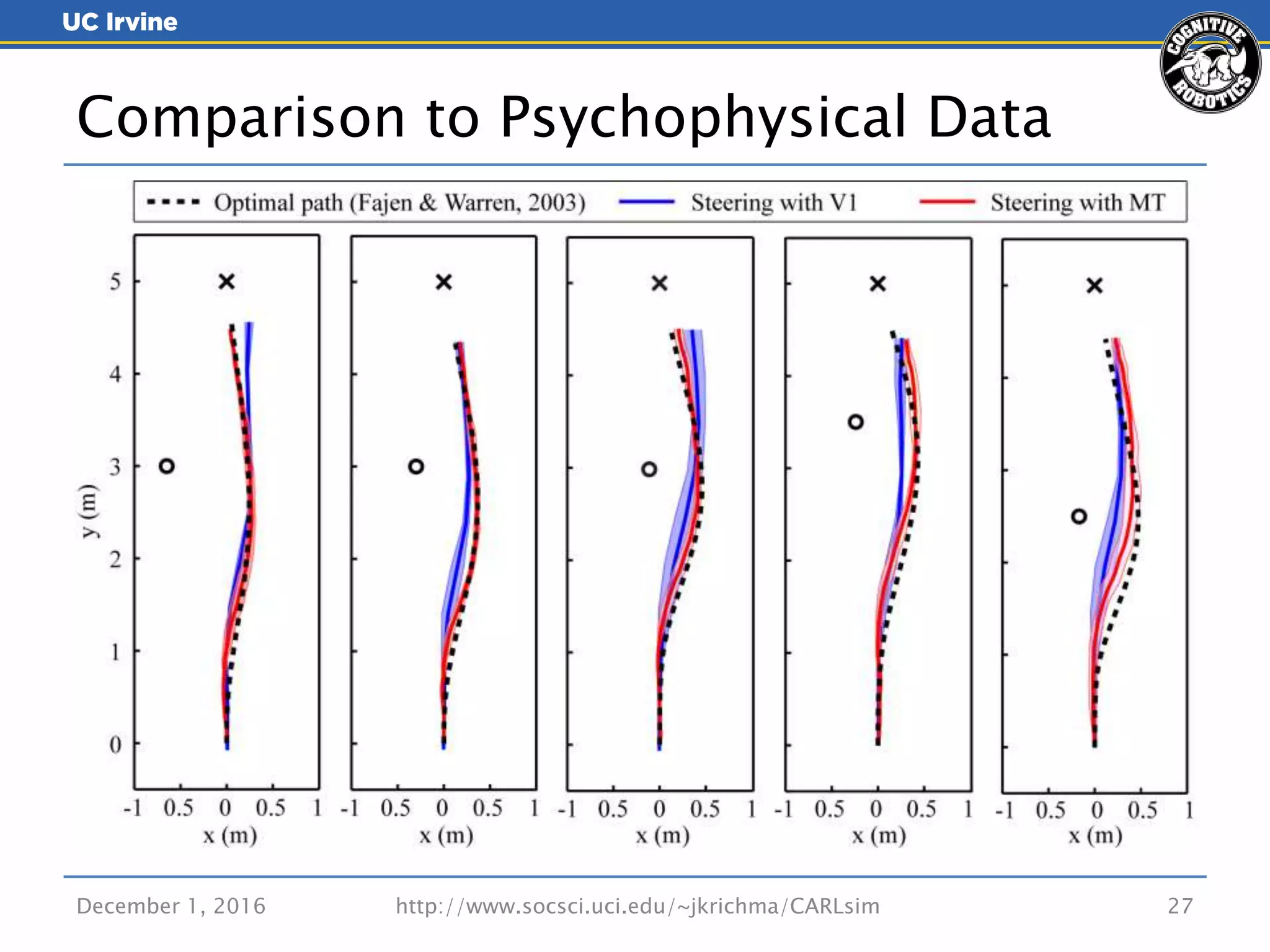
The document describes CARLSIM 3, a GPU-accelerated simulator for spiking neural networks (SNN) that captures key aspects of neural function and dynamics with a focus on real-time applications in robotics. It emphasizes its user-friendly interface, scalability, and various synaptic models for simulating biological processes, ultimately showcasing its applications in visual navigation and obstacle avoidance for robots. The software is freely available and optimized for NVIDIA GPUs, making it a valuable tool for theoretical neuroscience and neuromorphic engineering.