Download to read offline




















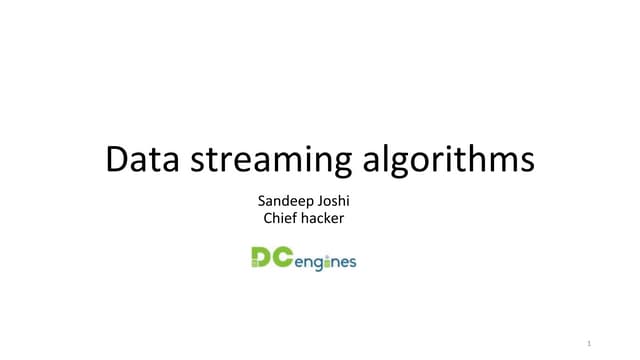
![State-based G-Counter (grow only)
(Vector-based approach)
Data
Integer V[] / one element per replica set
Init
V ≔ [0, 0, ... , 0]
Query
return ∑i V[i]
Update
increment(): V[i] ≔ V[i] + 1 / i is replica set number
Merge(V‘)
∀i ∈ [0, n-1] : V[i] ≔ max(V[i], V‘[i])](https://image.slidesharecdn.com/uwefriedrichsen-crdt-151030112238-lva1-app6892/75/Uwe-Friedrichsen-CRDT-und-mehr-uber-extreme-Verfugbarkeit-und-selbstheilende-Daten-code-talks-2015-21-2048.jpg)
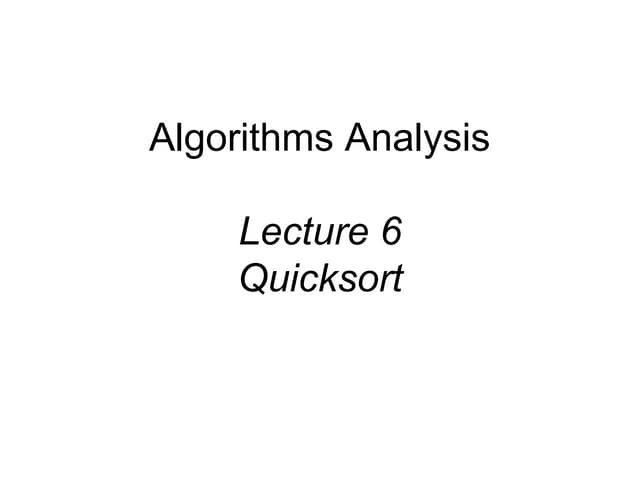
![State-based G-Counter (grow only)
(Vector-based approach)
R1
R3
R2
V = [1, 0, 0]
U
V = [0, 0, 0]
I
I
I
V = [0, 0, 0]
V = [0, 0, 0]
U
V = [0, 0, 1]
M
V = [1, 0, 0]
M
V = [1, 0, 1]](https://image.slidesharecdn.com/uwefriedrichsen-crdt-151030112238-lva1-app6892/75/Uwe-Friedrichsen-CRDT-und-mehr-uber-extreme-Verfugbarkeit-und-selbstheilende-Daten-code-talks-2015-22-2048.jpg)
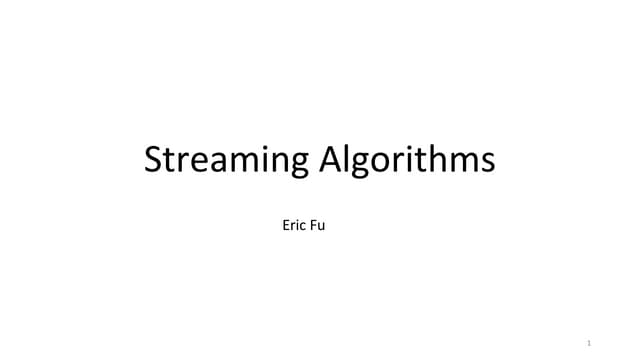
![State-based PN-Counter (pos./neg.)
• Simple vector approach as with G-Counter does not work
• Violates monotonicity requirement of semilattice
• Need to use two vectors
• Vector P to track incements
• Vector N to track decrements
• Query result is ∑i P[i] – N[i]](https://image.slidesharecdn.com/uwefriedrichsen-crdt-151030112238-lva1-app6892/75/Uwe-Friedrichsen-CRDT-und-mehr-uber-extreme-Verfugbarkeit-und-selbstheilende-Daten-code-talks-2015-23-2048.jpg)
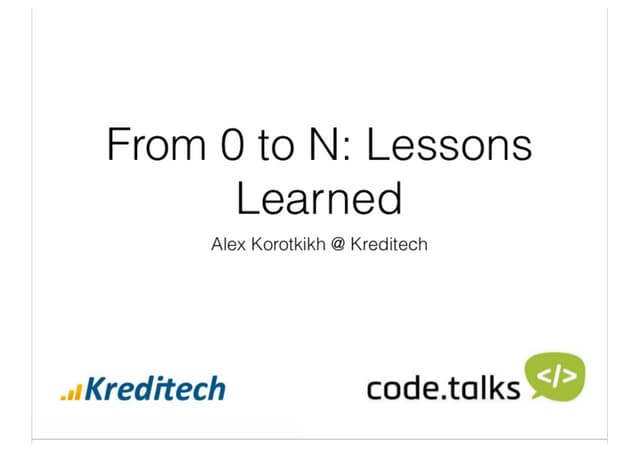
![State-based PN-Counter (pos./neg.)
Data
Integer P[], N[] / one element per replica set
Init
P ≔ [0, 0, ... , 0], N ≔ [0, 0, ... , 0]
Query
Return ∑i P[i] – N[i]
Update
increment(): P[i] ≔ P[i] + 1 / i is replica set number
decrement(): N[i] ≔ N[i] + 1 / i is replica set number
Merge(P‘, N‘)
∀i ∈ [0, n-1] : P[i] ≔ max(P[i], P‘[i])
∀i ∈ [0, n-1] : N[i] ≔ max(N[i], N‘[i])](https://image.slidesharecdn.com/uwefriedrichsen-crdt-151030112238-lva1-app6892/75/Uwe-Friedrichsen-CRDT-und-mehr-uber-extreme-Verfugbarkeit-und-selbstheilende-Daten-code-talks-2015-24-2048.jpg)
![Non-negative Counter
Problem: How to check a global invariant with local information only?
• Approach 1: Only dec if local state is > 0
• Concurrent decs could still lead to negative value
• Approach 2: Externalize negative values as 0
• inc(negative value) == noop(), violates counter semantics
• Approach 3: Local invariant – only allow dec if P[i] - N[i] > 0
• Works, but may be too strong limitation
• Approach 4: Synchronize
• Works, but violates assumptions and prerequisites of CRDTs](https://image.slidesharecdn.com/uwefriedrichsen-crdt-151030112238-lva1-app6892/75/Uwe-Friedrichsen-CRDT-und-mehr-uber-extreme-Verfugbarkeit-und-selbstheilende-Daten-code-talks-2015-25-2048.jpg)
















The document discusses conflict-free replicated data types (CRDTs), which are data structures designed to achieve maximum availability in distributed systems where strict consistency is not possible. It describes how CRDTs use state-based or operation-based approaches to allow for eventual consistency while preventing inconsistencies. Examples of CRDT implementations of counters, sets, registers and other data types are provided, along with discussions of their advantages and limitations compared to strict consistency models.